工业机器人圆周铺料路径规划研究
2014-09-06,,
,,
(哈尔滨工业大学机器人技术与系统国家重点实验室,黑龙江 哈尔滨 150000)
工业机器人圆周铺料路径规划研究
胡小田,曲东升,刘彦武
(哈尔滨工业大学机器人技术与系统国家重点实验室,黑龙江 哈尔滨 150000)
0 引言
为满足工业机器人圆周铺料作业需求,应对工业机器人末端的运动路径进行合理的规划,保证工业机器人在作业时躲避障碍物并以最短路径完成任务。
针对机器人的路径规划问题,前人已经做了很多相关研究。贾庆轩[1]研究了基于A*算法的空间机械臂的避障路径规划,提出了球形障碍物包络法,研究了各机械臂和障碍物发生碰撞的临界位姿;Li P[2]研究了基于A*算法的动态未知环境中移动机器人路径规划;王俊龙[3]研究了改进人工势场法的机械臂路径规划,提出以机械臂各个关节角为对象建立引力函数和斥力函数;莫栋成[4]研究了改进的快速探索随机树双足机器人路径规划算法,提出了任意时间快速探索随机树算法;刘传领[5]研究了基于势场法和遗传算法的移动机器人路径规划,提出了基于量子遗传算法的移动机器人路径规划方法;Francisco Rubio[6]对5种算法用于PUMA560机器人路径规划的效率进行了研究。5种算法依次是迪杰特斯拉算法、A*算法、基于A*算法的2种改进算法和遗传算法,最后得出遗传算法计算出的路径最短,A*改进算法的计算速度最快。总之,前人研究的工业机器人的避障路径规划中,没有考虑末端操作手的外形对避障产生的影响,没有考虑末端轴的旋转引起的避障路径规划;前人研究的移动机器人路径规划问题中,一般忽略机器人的形状,通过设定安全距离的方式,进行避障路径规划研究,并且涉及到的障碍物一般都是外凸型。研究工业机器人末端操作手的路径规划问题,着重考虑末端操作手的外形、机器人末端轴的旋转以及凹形障碍物对避障路径规划的影响,对末端操作手的位置和姿态进行合理的路径规划,可称之为位姿路径规划。
1 问题的提出
工业机器人带动铺料机构在圆桶内进行圆周铺料作业。在铺料过程中,需要做到逐层均匀铺料。
针对铺料过程中出现的不均匀的区域,应控制机器人带动铺料机构运动到相应区域进行补料动作。考虑到铺料机构的尺寸、机器人末端轴运动的极限位置及凹形障碍物等因素,应合理设计机器人末端的位姿序列,保证铺料机构不与圆桶内壁发生碰撞而又能以最短的路径运动到目标位置。如图1所示,设置铺料机构起始点为S,目标点为G,O为圆桶中心位置,机器人末端轴的运动范围为[-360°,360°]。若铺料机构沿路径1运动,铺料机构应顺时针转动以躲避障碍物,此时有可能导致机器人末端轴旋转到极限位置。若出现这种情况,则应控制末端轴逆时针运动。在逆时针运动过程中,为了保证铺料机构不和圆桶发生碰撞,铺料机构的运动轨迹应近似于路径2,其目的是用合适的算法规划出路径2,保证机器人以最短路径完成补料动作。
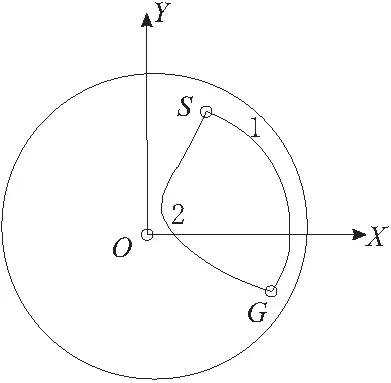
图1 路径规划问题简化
2 机器人末端可行域分析
铺料机构如图2所示,图中P点为机器人和铺料机构连接的中心位置,黑色区域为铺料机构出料区域,A1,B,C,D,E,F为铺料机构的边缘点。同一层铺料中,铺料机构在Z轴上位置不发生改变,同时为了保证铺料机构的平稳性,在铺料和补料时,铺料机构在X轴和Y轴方向的姿态角为0。因此,铺料机构的位姿可记为(Px,Py,θ),其中,Px为P点横坐标,Py为P点纵坐标,θ为A1C的中垂线段OH与X轴的夹角。
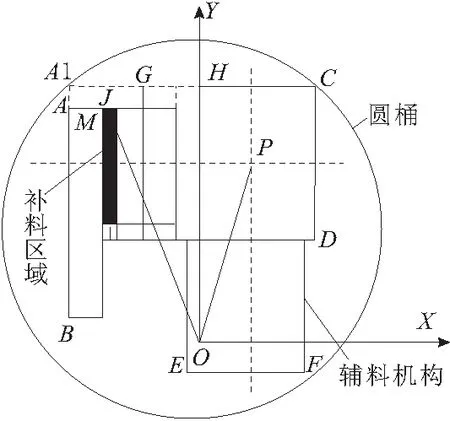
图2 铺料机构和圆桶简化模型
设P点的坐标为(x,y,θ),安全距离为dsafe,记:R0=R-dsafe,要使铺料机构无碰撞的在圆桶内运动,需满足条件:


由此可得机器人末端运动约束方程。
3 路径规划算法研究
根据以上分析可知,补料过程中的点到点路径规划可以描述为:给定初始位姿(p1x,p1y,θ1)和终止位姿(p2x,p2y,θ2),求解一系列中间点(px,py,θ),保证铺料机构能够从起始点无碰撞的到达终止点。
设规划起点位置为Ps,姿态为Ts,目标位置为Pe,姿态为Te,规划的路径为path,theta。path为2行n列的矩阵,每一列代表路径点位置坐标,theta是1行n列的矩阵,每一列代表相应位置下的姿态角,n代表路径点的个数。Trsa的作用是将角度变换到(-π,π]。
3.1 改进A*算法
采用A*算法进行路径规划时,考虑铺料机构姿态角的问题,所以应改进A*算法的估价函数,增加由于铺料机构转角引起的路径耗费。在设计铺料机构转角引起的路径耗费时,采用贪心策略,只关心当前转角到目标转角的差值,这样可以使得铺料机构快速的调整好姿态,达到目标位置处的姿态。
设计估价函数为:
f(j)=g(j)+h(j)+k(j)
h(j)=‖currentnode-Pe‖
(1)

j为当前节点序号;f(j)为估价函数;g(j)为起始点到当前位置的实际路径耗费;h(j)为当前位置到目标点的估计路径耗费;k(j)为铺料机构转动的估计路径耗费;currentnode为当前节点;angle为当前节点对应的姿态角。
3.2 改进RRT算法
RRT算法的实现过程是:随机生成测试点,在随机树中寻找离测试点最近的节点,称之为父节点,并沿着父节点到测试点的方向以一定得步长得到新节点,接着判断新的节点是否满足避障要求,如果满足则将新生成的节点加入到随机树中,如果不满足则再次循环上述过程寻找树节点,直到随机树扩展到目标位置。
常规的RRT算法随机性太大,可重复性太差,规划的路径很难接近最短路径,若将改进的A*策略用于RRT算法中,对新生成的节点进行启发判断,如此可以极大地降低路径的随机性,并且极大的缩短路径长度。
3.3 基于RRT的A*算法
改进后的A*算法可以实现路径规划,但是规划时间耗费大,其原因是:A*算法采用了栅格法对运动空间进行描述,牺牲了大量的机器人自由空间,减少了可行的路径试探点,从而增加了时间耗费。如果将RRT算法的节点扩展和改进后的A*算法相结合,针对可行域内的节点进行随机扩展,再利用A*算法的启发函数进行启发式搜索,如此可以保证路径次优的情况下极大的提高路径规划速度。
4 仿真实验
为了验证改进后算法的可行性,在仿真软件平台上进行仿真验证,设初始补料区域中心位置为(0,600),目标位置为(500,400),基于RRT的A*算法规划从起始点到目标点的路径如图3所示。

图3 基于RRT的A*算法
改进A*算法、改进RRT算法和基于RRT的A*算法路径规划参数对比如表1所示,从表中各项参数可以发现,基于RRT的A*算法充分的发挥了A*算法和RRT算法的优势,快速地规划出了接近最短的路径。

表1 各算法结果对比
5 结束语
为解决在凹形障碍物内,大体积外形末端操作手的避障路径规划问题,分析了机器人末端可行域,改进了A*算法,提出了基于转角的路径耗费,设计了A*算法的估价函数;将改进的A*策略应用于RRT节点扩展当中;摈弃了A*算法中八连通扩展方法,将RRT算法中的节点生成思想融合到A*算法中,提出了基于RRT的A*算法。
通过仿真实验验证了改进后的算法的可行性,并验证了基于RRT的A*算法的高效性。
[1] 贾庆轩.基于A*算法的空间机械臂避障路径规划[J].机械工程学报,2010,46(13):109-115.
[2] Li P.A new hybrid method for mobile robot dynamic local path planning in unknown[J].Journal of Computers,2010,5(5):773-780.
[3] 王俊龙.改进人工势场法的机械臂避障路径规划[J].计算机工程与应用, 2012,11(21):27-31.
[4] 莫栋成.改进的快速探索随机树双足机器人路径规划算法[J].计算机应用,2013,33(1):199-201.
[5] 刘传领.基于势场法和遗传算法的移动机器人路径规划[D].南京:南京理工大学,2012.
[6] Rubio F.Comparing the efficiency of five algorithms applied to path planning for industrial robots[R].Polytechnic University of Valencia:ICTV,2012.
Path Planning for Industrial Robot Used in Paving Material in Barrel
HUXiaotian,QUDongsheng,LIUYanwu
(State Key Laboratory of Robotics and System,Harbin Institude of Technology,Harbin 150000,China)
针对工业机器人圆周铺料作业需求,研究了现有的避障路径规划方法。分析了末端操作手在凹形障碍物中的自由运动空间,改进了A*算法的估价函数,设计了关于姿态角的估计路径耗费,并将估价函数引入RRT算法中,同时提出了基于RRT思想的A*算法。最后,通过仿真实验验证了改进后算法的可行性,并对比了各算法的执行效率。
工业机器人;位姿路径规划;基于RRT的A*算法;改进A*算法;改进RRT算法
The path planning algorithms for the terminal hand of industrial robot are modified to meet the demands of paving material in barrel after analysing the free motion space of the terminal hand.Firstly,modifying the evaluation function used in A*algorithm by adding the evaluation function of the angle of the terminal hand.Secondly,modifying RRT algorithm by using evaluation function.Thirdly,proposing the modified A*algorithm based on the RRT algorithm.Lastly,confirming that the modified algorithms are feasible;and comparing the efficiency of these algorithms to find out the best algorithm.
industrial robot;path planning of position and pose;A*algorithm based on RRT algorithm;the modified A*algorithm;the modified RRT algorithm
2014-04-04
TP301.6
A
1001-2257(2014)08-0078-03
胡小田(1989-),男,江西抚州人,硕士研究生,研究方向为机器人路径规划。
