关节空间样条的连续点位运动规划算法
2014-09-06,
,
(上海交通大学机械与动力工程学院,上海200240)
关节空间样条的连续点位运动规划算法
刘承立,栾楠
(上海交通大学机械与动力工程学院,上海200240)
0 引言
工业机器人的运动过程需要在满足各种工作条件下给出一个高效合理的规划。传统上工业机器人的运动规划分为PTP运动(point-to-point)和CP运动(continuous path),其中PTP控制最为简单,没有插补运算,各轴同时独立地走完自己的规划即可,其常用于快速定位和搬运作业[1]。
基本的PTP运动从静止开始,到达目标点位置时速度减为零,相应加速度也为零。在实际作业中,为了避开可能的障碍,或者在不同的阶段采用不同的运动速度,往往需要用若干中间点来对整个PTP运动轨迹进行约束,即此时机器人需要连续进行多点的PTP运动规划。如果简单地逐段应用基本的PTP规划,那么在每一个中间点都有一个减速、停顿、加速的过程,这对于搬运等实际作业时是不合理的,不仅大大降低了工作效率,而且还增加了能耗[2]。
一般的工业机器人产品都提供了连续点位运动规划,典型的做法是当机器人以给定的范围“接近”目标点时,立即以此当前位姿作为起点,下一点作为目标点,当前速度和加速度作为初始条件,进行下一段的规划。在该做法中,“接近”范围一般是以总行程的百分比表示,例如一旦完成该段行程的90%,即距离目标点不足10%的时候,立即规划并向下一个目标点进发。其优点是,计算简单,能够实现连续的点位运动。缺点是,示教或计算得到的中间点不会准确到达,只是“接近”该点;整个轨迹的速度可能仍然不连续,比如,当“接近”的范围过小时,其速度连续的效果不明显,仍然会有明显的减速过程,只是不会减速至零;而“接近”范围过大则距离中间目标点的误差较大时就会开始下一目标点的运动。
因此,一种简单高效的PTP运动规划方法对于提升机器人的运动性能是有很大意义的。
1 关节空间样条曲线算法原理
由于机器人的运动是多关节联动,即使不需要插补的PTP运动,至少也要保证各轴准确到达目标点或者中间点的同时性。因此,每一个轴在每一段运动的速度不仅取决于指令本身,也取决与其他轴的路径及速度等运动情况。要针对所有可能出现的运动状况作出一个判断,从而给出一个全局最优的规划,即保证机器人运动轨迹准确地经过所有中间点,各轴运动速度光滑,加速度连续,且符合指令的要求。事实证明,这是非常困难的,难以做到用简单算法在机器人控制器中实现实时控制,即便能实现,也不符合PTP算法简单快速、不需要进行插补的初衷[3]。
1.1 传统三次样条曲线规划
为了保证运动的平稳性,就要保证速度光滑,加速度连续。因此,机器人的运动规划至少应该是由三次函数构建,为此首先想到采用三次样条曲线进行规划[4]。针对某一个轴,直接将所有经过的m个点,作为样条点,如图1所示,按照指令给定的速度计算每一段运动所需要的时间,实际中每段时间取所有关节轴中所需时间最大值,从而保证同时到达。此时m-1段样条曲线共计4(m-1)个未定参数,除起点和终点以外的m-2个中间点满足的条件为位置准确到达且连续、速度连续、加速度连续,起点和终点处位置准确到达,共计4m-6个条件,还欠缺的2个一般令起点和终点速度为零作为边界条件,就可以构成标准的三次样条函数[5],如图1所示。图中已对角位移、角速度、角加速度和时间量做了归一化处理,下同。

图1 传统三次样条曲线下角位移、角加速度曲线
图1中,实线为以传统三次样条曲线规划出的轨迹,虚线为理想轨迹,点划线为传统三次样条下的加速度曲线。可以发现,简单采用传统三次样条曲线进行规划具有的不足是,由于该方式下只能指定2个边界条件,所以只能选择指定速度,那么起点和终点加速度不为零,有一定的跳变,这会使得在实际应用中产生震动,对应图1中t=0和t=10时刻;不能保形,样条的光滑性会导致不期望的运动,例如某关节在t=0-2时间段内期望是静止不动的,但是由于样条对曲线进行光滑会使其产生如图1所示的运动,这是不期望出现的[6]。
1.2 算法基本原理
为了解决上面的缺点,可以采取分段的方法,增加可变参数来达到调节或约束曲线形状的目的。例如,在2个示教点或计算得到的点之间插入n个中间点,将一段运动曲线分为n+1段,这样就可以进一步地满足更多的边界条件。以插入2个中间点(n=2)为例,将某段运动曲线分为3段,比如,任意2个示教点之间的运动,可以指定如下边界条件:两端点位置(示教点或计算得到的点)、两端点速度、两端点加速度,共计6个条件[7]。而一般三次样条S=a0+a1t+a2t2+a3t3,只有4个未定参数,只需要4个不相关条件即可。如果按照本文思想,将该段运动按时间等分为3段,则
(1)
a10,a11,……,a33为12个未定参数。

(2)
联立式(1)和式(2)方程组,可导出式(1)中各式的待定参数为:
(3)
(4)
(5)
2 算例验证
基于关节空间样条的连续点位运动算法已在一种四自由度码垛机器人中得到验证,能够快速实现轨迹规划,并且实现了加速度无跳变,运动速度光滑且能准确到达中间示教点。算法规划出的2个示教点之间做点位运动的角位移、角速度和角加速度曲线如图2所示。算法规划出的3个示教点之间做点位运动的角位移、角速度和角加速度曲线如图3~图5所示。其中,图3对应2端点速度为0,中间点高速的运动情况;图4对应2端点为高速,中间点速度为0的运动情况;图5对应起始点和中间点高速运动,末端点降速为0的运动情况。由图2~图5可以看出,在各种工况下,该算法均能实现示教点或计算得出点的位置准确到达,而且由于该算法可以满足更多的边界条件,从而彻底消除了加速度跳变,满足中间点位置、速度和加速度连续的要求,实现了位置、速度的平滑过渡。
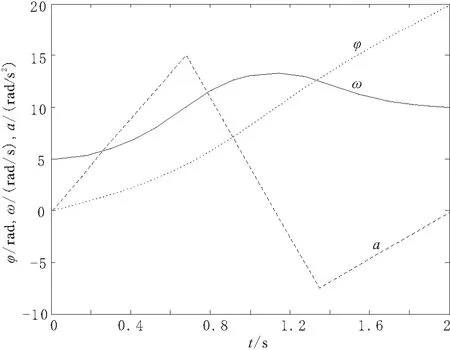
图2 点位运动时关节坐标下φ、ω、a
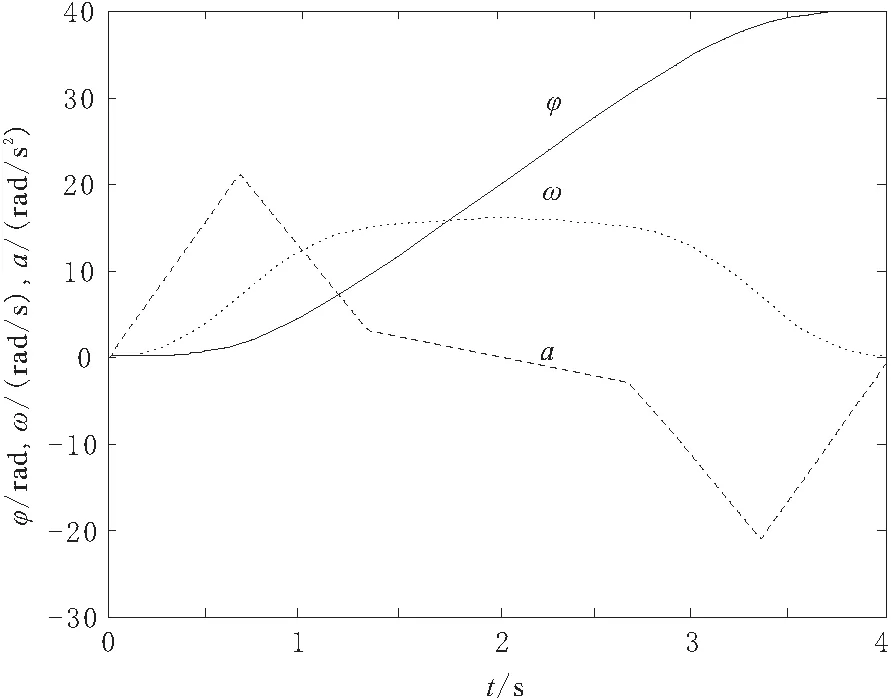
图3 连续点位运动1

图5 连续点位运动3
3 实际运用
规划的流程如图6所示。在实际工程应用中,为了简化处理,要求每个示教点上加速度为零,速度则根据用户给定参数和应用特点共同指定。机器人运动一般不允许位置超调,而在该算法的基础上还需要做出如下处理,如果下一段位置反向,则该段末速度降为零;如果后续的同向运动距离过短,速度根据减速所需距离下降;否则按指令给定的速度运动,每个轴的实际速度需要根据各自轴位移的比例调整,以保证运动的同时性。
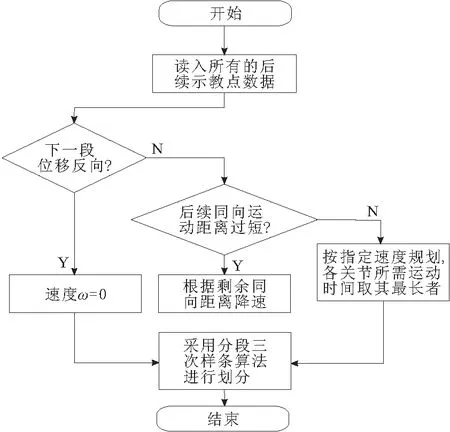
图6 规划过程
4 结束语
机器人的运动规划是其运动控制的核心部分之一,对于机器人的运动过程起着至关重要的作用。该规划方法已在四轴码垛机器人上得到应用,以其为例,起初应用传统的三次样条规划其进行码垛运动,过程中常出现小幅震动(加速度跳变引起)、超调、速度受限和中间点不能准确到达等问题,后来采用基于关节空间样条进行插点分段规划,并对特殊运动状态做出处理,最终实现了快速、光顺的搬运动作。该规划算法具有通用性,并不局限于4轴,也不局限于搬运机器人,可广泛用于各类机器人空间内的连续点位运动,尤其是要求中间示教点准确到达的情况。当示教点(或者离线计算点)比较密,精度要求不高时,可以直接作为样条插补使用。
[1] 曹波,曹其新,童上高,等.基于时间最优的搬运机器人运动规划[J].组合机床与自动化加工技术,2012,7(7):33-38.
[2] 黄时聪,王刚,郝杰成.机器人PTP控制曲线的研究与实现[J].机械工业自动化,1992,14(3):24-28.
[3] Guo Z,Hsia T.Joint trajectory generation for redundant robots in an environment with obstacles[C]//In IEEE Int.Conf.on Robotics and Automation,1990.157-162.
[4] 李纯军,尹周平,熊涛,等.一种点位运动快速规划算法[J].组合机床与自动化加工技术,2011,3(3):62-64.
[5] Mu H H,Zhou Y F.Third-order trajectory planning for high accuracy point-to-point motion[J].Journal of Huazhong University of Science and Technology,2007(35):58-61.
[6] 秦峰,徐向荣.基于样条函数法的机器人运动轨迹规划[J].机械科学与技术,1996,15(4):561-565.
[7] 张红强,章兢,王耀南,等.机器人关节空间B样条轨迹设计的混沌优化[J].电机与控制学报,2007,11(2):174-177.
[8] 叶留青,杨梦龙,陈绍春.一类C1保形三次Spline插值函数的充要条件及其构造方法[J].河南科学,2006,24(3):316-318.
Continuous Point-to-point Motion Planning Algorithm Based on Splines in Joint Space
LIUChengli,LUANNan
(School of Mechanical Engineering,Shanghai Jiaotong University,Shanghai 200240,China)
为了提高工业机器人的运动平稳性和快速性,保证机器人在走曲线时能够准确到达各示教点并且实现平滑过渡,提出一种基于关节空间样条的连续点位运动规划算法。以关节空间的单个轴为例,从一般三阶S曲线轨迹出发,为了保证规划得到的加速度不跳变以及样条曲线能够保形,在两个相邻示教点之间插入n个中间点,将一段轨迹分为n+1段,根据该关节起点和终点的位置、速度和加速度以及插入点位置、速度、加速度连续的边界条件,可以得到新的规划轨迹。最后通过实验比较验证,该规划算法能够快速实现过程点的准确到达并且加速度没有跳变、曲线能够保形,具有实际推广价值。
连续点位运动;规划算法;关节空间样条
To improve the moving stationarity and rapidity of industrial robots and ensure its reachability to each teaching point and smooth transition,this paper presents a kind of continuous point-to-point motion planning algorithm based on splines in joint space.Take a single axis in joint space as an example,we can firstly analyzed the general third-order S-curve trajectory.In order to ensure the planning acceleration have no jump and the curve is conformal,we insertnintermediate points between two adjacent teaching points and therefore a section of the trajectory is divided inton+1segments.According to these boundary conditions-the position,velocity and acceleration of the start and the end points and their continuity at the inserted points,a new planned trajectory can be obtained. Finally,by the experimental verification, this planning algorithm can make the robot quickly and accurately reach the teaching points without acceleration-jump and the curve conformal,and can be applied to practical situation.
continuous point-to-point motion;planning algorithm;splines in joint space
2014-04-14
TP242.2
A
1001-2257(2014)08-0074-04
刘承立(1990-),男,山东聊城人,硕士研究生,研究方向为工业机器人与智能控制;栾楠(1973-),男,湖北武汉人,副教授,研究方向为机器人学、机器人智能控制。
