基于PLC的海洋钻井平台钻杆传送机械手控制系统设计
2014-09-06郑玉龙张玉莲
郑玉龙,张玉莲,2
(1.浙江海洋学院 船舶与海洋工程学院,浙江 舟山 316021)(2.浙江省近海海洋工程技术重点实验室,浙江 舟山 316021)
基于PLC的海洋钻井平台钻杆传送机械手控制系统设计
郑玉龙1,张玉莲1,2
(1.浙江海洋学院 船舶与海洋工程学院,浙江 舟山 316021)(2.浙江省近海海洋工程技术重点实验室,浙江 舟山 316021)
海洋钻井平台钻杆传送机械手,可代替人工将钻杆传送给钻机,从而降低工人的劳动强度。介绍了钻杆传送机械手的基本结构组成,通过对钻杆传送机械手工作过程的分析,设计了钻杆传送机械手的液压控制系统和PLC控制系统,并针对传送机械手的工作循环过程,设计了相应的PLC控制程序。
钻杆传送;机械手;PLC控制
海洋钻井平台钻井机工作时,每钻进一根钻杆,需要接入另一根钻杆。海洋钻井平台钻井所用的钻杆数量多且质量大,采用人工接入钻杆的方法,不但劳动强度大、效率低,而且存在安全隐患。机械手作为现代工业的重要自动化装备,能代替人工高效地完成人力较难完成的工作,在许多领域发挥着越来越重要的作用。应用机械手完成钻井过程中钻杆的传送与接入,可有效降低工人的劳动强度,提高钻井的工作效率,节约生产成本。
1 钻杆传送机械手工作原理
钻杆传送机械手主要结构 (如图1所示) 包括:立柱2、液压缸3、上机械臂4、上夹持钳5、下夹持钳6、下机械臂8、转盘9、小车10。立柱2固定在转盘9上,可随转盘转动,转盘由小车内部的摆动液压缸控制;上、下机械臂4和8的一端与立柱铰链连接,另一端与连杆铰链连接,从而构成平行四杆机构;液压缸3的伸缩可控制机械臂做上下摆动,从而控制夹持钳的进给量;机械手夹持钳5和6用于夹持钻杆;小车10在电机的驱动下可沿导轨运动,小车头部装有传感器,用来检测钻杆的位置[1]。
机械手的工作过程为:需要抓取钻杆时,小车10沿导轨12运动到存放钻杆的位置,根据传感器检测到的钻杆位置信息,控制转盘9带动立柱2使机械手夹持钳5和6朝向钻杆;接着液压缸3伸长,使上、下机械臂4和8伸出,夹持钳5和6接近待抓取的钻杆,然后夹持钳5和6闭合抓住钻杆;接着,液压缸3收缩,使机械臂4和8夹持着钻杆回缩,转盘反向转动使钻杆朝向导轨方向,小车沿导轨运动到井口11,液压缸3伸长,机械臂将钻杆传送到钻机7的下方,待钻机夹持住钻杆后,机械臂上的两夹持钳松开,液压缸3缩回。机械手复位,回到初始状态并进行下一个取杆、送杆的工作循环。

1—钻杆;2—立柱;3—液压缸;4—上机械手臂;5—上夹持钳;6—下夹持钳;7—钻机;8—下机械手臂;9—转盘;10—小车;11—井口;12—小车轨道
2 机械手液压系统
机械手转盘的转动采用摆动液压缸形式(如图2所示)。摆动液压缸旋转方向由换向阀上的电磁铁[2]1YA、2YA控制,电磁铁1YA得电时,液压缸活塞伸出,转盘逆时针转动;电磁铁2YA得电时,液压缸活塞缩回,转盘顺时针转动。
控制机械臂和机械手夹持钳的液压系统控制回路[3]如图2所示。机械臂液压缸的伸缩由电磁换向阀的电磁铁3YA、4YA控制,电磁铁3YA得电时,液压缸活塞伸出;电磁铁4YA得电时,液压缸活塞缩回。机械手夹持钳的开合由电磁换向阀的电磁铁5YA、6YA、7YA、8YA控制,其结构如图3所示。电磁铁5YA、7YA得电时,夹持钳液压缸活塞伸出,夹持钳张开;电磁铁6YA、8YA得电时,夹持钳液压缸活塞收缩,夹持钳闭合。
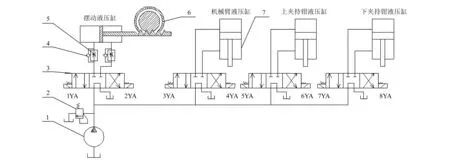
1—液压泵;2—溢流阀;3—三位四通换向阀;4—单向阀;5—节流阀;6—旋转装置;7—液压缸

1—夹持钳;2—液压缸
3 机械手PLC控制系统
由输入端口采集的信号作为 PLC的输入信号,经用户设定的程序运算后,由输出端口输出相应的控制信号,用于控制液压阀的电磁铁,进而控制液压系统油路的流动方向,从而控制机械手完成钻杆传送工作。
3.1PLC端口地址分配
PLC输入信号来自于起始按钮SB0、停止按钮SB1、立柱的原位行程开关SQ1和终点行程开关SQ2、机械臂原位行程开关SQ3和终点行程开关SQ4、上夹持钳放松到位行程开关SQ5和夹紧到位行程开关SQ6、下夹持钳放松到位行程开关SQ7和夹紧到位行程开关SQ8、小车原位行程开关SQ9以及传感器SB2,传感器检测到钻杆时,输出高电平。
PLC输出信号分别控制液压系统的电磁阀控制端的电磁铁1YA~8YA和驱使小车往复运动的电机继电器开关KM1、KM2 。PLC的I/O分配图如图4所示。
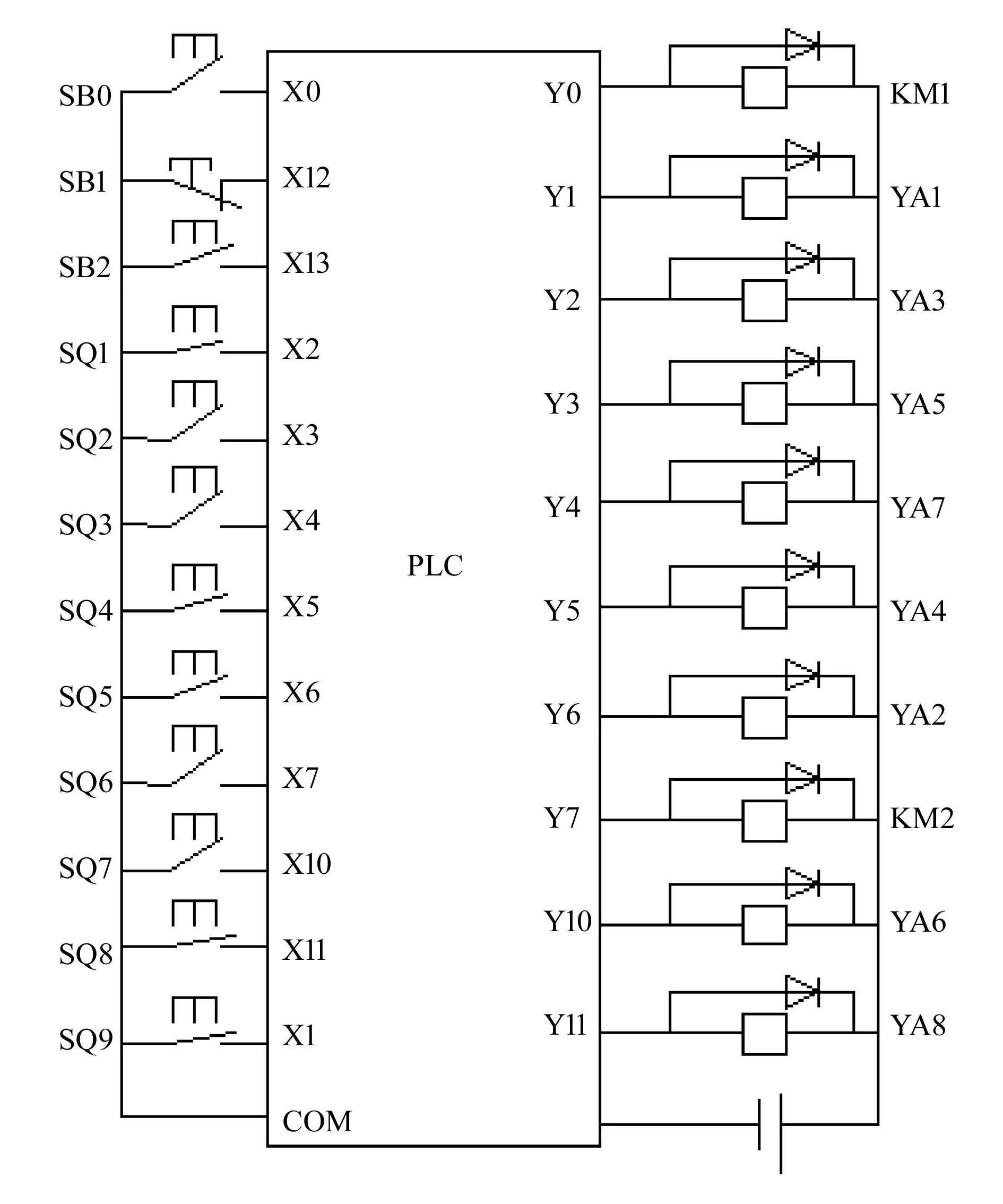
图4 I/O分配图
3.2液压系统工作过程的PLC控制
基于钻杆传送机械手的系统组成及其钻杆传送的工作过程,结合PLC的端口分配,得出液压系统工作过程的PLC控制顺序表[4],见表1。
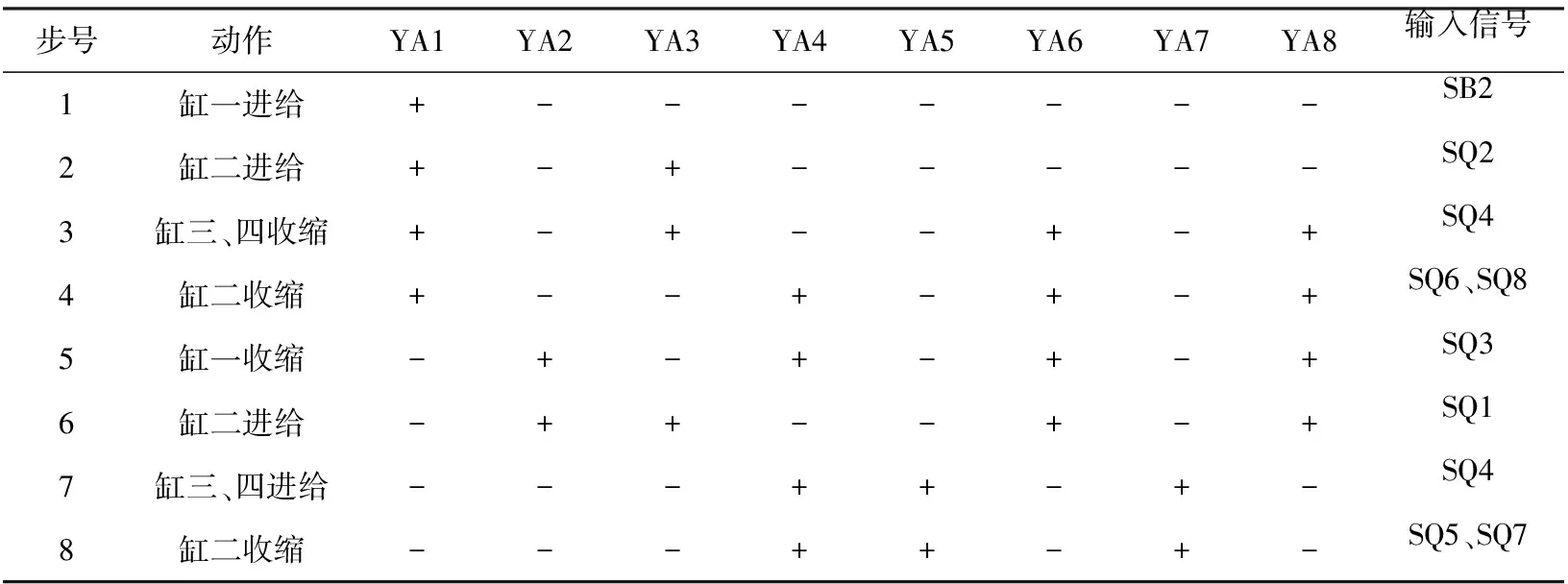
表1 液压系统工作过程的PLC控制顺序表
注:表中“+”表示电磁铁得电;“-”表示电磁铁失电。
3.3PLC的控制程序设计
根据液压系统工作过程的PLC控制顺序表,采用GX Works2三菱软件编制PLC用户程序,这里采用梯形图形式[5],如图5所示。
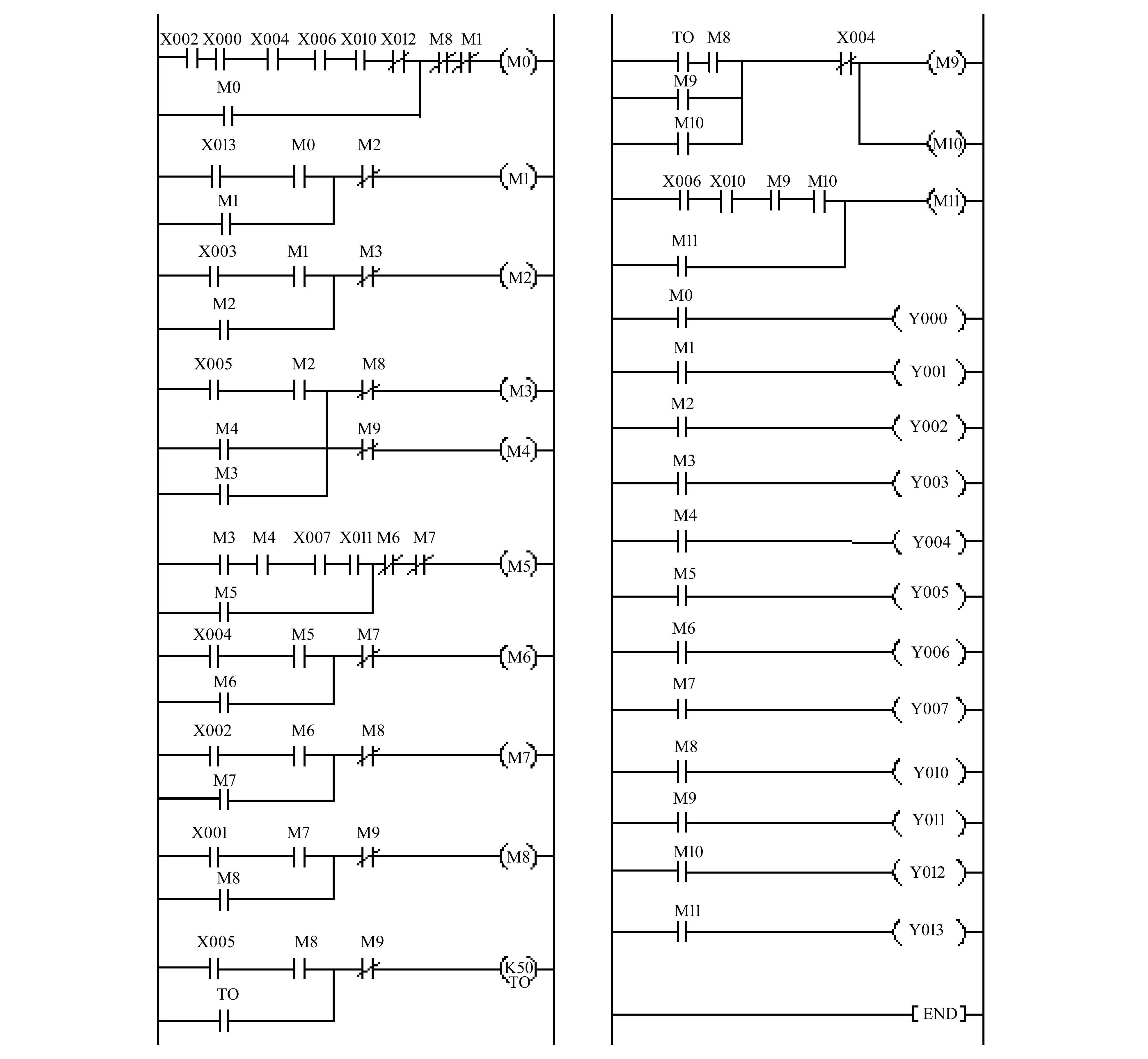
图5 PLC控制机械手抓取钻杆梯形图
4 结束语
利用PLC控制的钻杆传送机械手,代替人工传送钻杆,可有效降低工人的劳动强度,提高钻井效率,利于安全生产。
本文所述的海洋钻井平台钻杆传送机械手结构简单,控制方便,适应性强。基于PLC的传送机械与控制系统,可以根据实际生产环境中的不同工况,实时地调整PLC程序,以满足不同的工作需要。
[1] 石美玉,杨国家,李富平,等.海洋钻机钻杆自动排放系统控制方案设计[J].石油矿场机械,2011,40(12):41-44.
[2] 海心,赵华.机电传动控制[M].北京:高等教育出版社,2007.
[3] 张玉莲,黄方平,郑雄胜,等.液压和气压传动控制[M].杭州:浙江大学出版社,2012.
[4] 黄伯志,赵轲,邓昌奇,等.基于PLC的液压试验台控制系统改造[J].机械设计与制造工程,2014,43(8):47-49.
[5] 叶德云.PLC仿真技术的应用[J].广东水利电力职业技术学院学报,2003(1):37-39.
ThePLCcontrolsystemdevelopmentofthedrillpipetransmissionmanipulatorforoceandrillingplatform
ZHENG Yulong1, ZHANG Yulian1,2
(1.Zhejiang Institute of Ocean, Zhejiang Zhoushan, 316021, China)(2.Key Laboratory of offshore Engineering Technology of Zhejiang Province,Zhejiang Zhoushan 316021,China)
The manipulator of drill pipe transmission on ocean drilling platform can replace the workers to transfer drill pipe to rig, reduce the labor intensity of workers. This paper introduces the basic structural composition of drill pipe transmission manipulator. Based on analysis of working process of manipulator, it designs the hydraulic control system and develops PLC control system of manipulator.
drill pipe transmission; manipulator; hydraulic control system; PLC control system
10.3969/j.issn.2095-509X.2014.12.012
2014-12-01
郑玉龙(1992—),男,浙江建德人,浙江海洋学院本科生,专业为机械设计制造及其自动化。
TE928
A
2095-509X(2014)12-0051-04
