基于改进人工鱼群算法的无人艇控制参数优化
2014-08-26廖煜雷刘鹏王建张铭钧
廖煜雷,刘鹏,王建,张铭钧,2
(1.哈尔滨工程大学 水下机器人技术重点实验室,黑龙江哈尔滨150001;2.哈尔滨工程大学 机电工程学院,黑龙江 哈尔滨150001)
近年来,随着海洋资源勘探与开发、海洋安全越来越受到人们的高度重视,无人艇(unmanned surface vehicle,USV)由于在海洋科研、海洋安全等方面具有广泛的应用潜力,逐渐成为了国际研究热点[1-2]。一些学者针对欠驱动USV的控制问题进行了深入探讨[3-6],欠驱动USV控制系统的参数优化存在分析复杂、多参数、强非线性等难点,是典型的非线性系统最优控制问题。在该类系统的设计中,一般依据设计者的经验,采用试凑的方法来调整控制参数,这样难以得到最优、甚至次优的控制参数。一种可能的解决办法是利用优化算法进行参数寻优,目前常用的优化方法有模拟退火、遗传、蚁群、粒子群、人工鱼群等算法。文中针对控制参数调节困难的问题,考虑将人工鱼群算法(artificial fish swarm algorithm,AFSA)应用到USV控制系统的参数优化中,为解决非线性控制参数的优化问题提供一种有效途径。由于AFSA具有对参数、初值和目标函数等要求低,分布并行寻优、全局收敛性好、收敛迅速等诸多优点[8],在控制参数优化[8]、股票预测[9]、模型辨识[10]、数据挖掘[11]、通信网络优化等领域均有应用。然而AFSA也存在求解精度低、后期收敛缓慢、算法退化等问题[12-15]。
本文针对AFSA存在的收敛缓慢等问题,考虑引入生存机制、寻优过程评估、动态调整参数等方法,提出了一种改进人工鱼群算法(improved artificial fish swarm algorithm,IAFSA),并利用IAFSA解决欠驱动USV的控制参数优化问题。
1 控制系统设计
1.1 控制问题描述
本文讨论的一类欠驱动USV的水平面运动模型如图1。该USV仅有的控制输入为纵向推力F和转艏力矩T(2个控制输入),少于系统输出维数(3自由度),因此该USV具有欠驱动性。

图1 无人艇的水平面运动模型Fig.1 USV model in plane motion
在一定假设条件USV的运动和动力学模型可描述为[16]

式中:x、y表示船的重心在惯性坐标系{I}中的位置,ψ是船的艏向角;u、υ、r分别表示在船体坐标系{B}中船的纵向、横向和偏航(角)速度;τ1、τ2、τ3分别表示船在纵向、横向、艏向受到的有界环境干扰力;参数mii和dii分别是船的惯性和阻尼参数矩阵在{B}系3个坐标轴上的分量,模型参数存在有界不确定性。
选用文献[17]中的轨迹规划方法,假设在惯性系{I}中USV重心G所跟踪的轨迹是惯性系下位置变量xd(t)、yd(t)关于时间的函数,下标“d”表示期望变量。、为惯性系{I}下的参考速度:
式中:下标“r”表示参考变量;正常数Ux,max、Uy,max表示USV向期望轨迹运动的最大接近速度,其大小由USV的机动能力决定;Δx、Δy为调节因子,用于调节跟踪过程的动态行为。通过坐标变换,船体坐标系{B}下的参考跟踪速度ur、υr和加速度可表示为

因此USV的轨迹跟踪控制目标为:设计反馈控制律保证USV跟踪上参考速度,并最终收敛到期望轨迹。
1.2 控制器设计
下面基于滑模控制理论[16-18],分别设计纵向和横向的轨迹跟踪控制器[16]。
1.2.1 纵向控制器设计
纵向滑模表面采用一阶的指数镇定面:

式中:ue=u-ur表示纵向速度差。
设计纵向滑模控制器为

式(1)中模型参数和干扰力的不确定界限为


定义Lyapunov函数:将V1对时间求导,并将式(1)、(2)代入,可得

选择k1为
式中:η1为正常数。
将式(5)代入式(4)可知,V1满足可达条件:

1.2.2 横向控制器设计
横向滑模表面定义为二阶的指数镇定面:

式中:υe=υ-υr表示横向速度差。
将S2对时间求导,并设其导数为零,可得等式:


将式(1)、(7)代入式(6),可得名义横向控制器

式中:h、b的表达式为

设计横向滑模控制器为

式中:Φ2为边界层厚度。定义Lyapunov函数:

将V2对时间求导,并把式(6)~(11)代入,可得

选择k2为

式中:η2为正常数;H为h的不确定性范围,且满足;β的范围依赖于b的几何平均数,详细定义见文献[18]。
将式(13)代入式(12)可知,V2满足可达条件

根据文献[16]的分析过程可证明,控制器式(3)、(11)保证了轨迹跟踪系统的渐近稳定性,且艏摇运动r是有界输入-有界输出稳定的。
2 改进人工鱼群算法
2.1 人工鱼群算法
李晓磊[8]提出了人工鱼群算法。该算法基于动物自治体的概念,通过模拟自然界中鱼群的觅食、追尾、聚群等行为,并模拟鱼群集体协作的社会行为,以最终实现集群智能的一种仿生型群智能优化算法。
AFSA中基本概念与参数的定义:为最大目标搜索空间的维度;表示欲寻优变量的求解域,即表示人工鱼的视野;为人工鱼的最大移动步长;κ为拥挤度系数;为试探次数;n为人工鱼群体的总数量;X表示人工鱼群整体,X=[X1,X2,…,Xn]T;第i条人工鱼的状态表示为向量Xi=(xi1,xi2,…,),(i=1,2,…,n);人工鱼个体间的距离为;人工鱼当前所在位置的食物浓度为Yi=f(Xi),即Y为目标函数值为最大迭代次数,表示第次迭代。文中以求取极大值为例进行讨论。
大量文献研究表明[11-15],虽然AFSA具有很多突出优点,但也存在一些问题:1)在搜索前期收敛速度快,但后期收敛变慢;同时搜索缺乏协调性,易出现“算法退化”现象。2)对最优精确解的获取能力不够,仅能得到全局最优解的邻域。3)鱼群群体缺乏协调性和交互性。公告板是自下而上的交互(个体行为可以影响到群体最优解),而没有自上而下的交互(群体最优解没有对个体行为施加影响)。
2.2 改进人工鱼群算法
在AFSA提出后,很多研究者曾尝试改进其算法,主要改进思路:1)对算法本身提出了很多的改进措施,例如:弹性自适应AFSA、极坐标编码AFSA、生境式AFSA、分解协调式AFSA等;2)将不同的优化算法相结合或融合,通过利用各自算法的长处以实现优势互补,例如:AFSA与蚁群、AFSA和模拟退火、AFSA同 Hopfield网络、AFSA与遗传算法等。
文中提出一种改进人工鱼群算法(IAFSA),主要改进思想:引入生存机制以提高群体的进化能力和协调性;随着寻优的进行,自适应地调整鱼群参数和求解域,并最终实现全局性、自适应、高速、高精度的寻优目标。下面讨论几点改进方法。
2.2.1 搜索过程的评估和行动策略的调整
将寻优过程动态地分为3个阶段,前期、中期、后期。前期:对整个求解域进行粗略搜索,确定局部最优求解域。中期:淘汰部分局部最优解域,定位全局最优求解域。后期:重点在最优解域附近开展精细搜索,提高求解精度。对于求解极大值问题,采用的评估方法为
其中:
行动策略选为:前期和中期采用进步最快策略,预先开展3种行为,而后选择最优者执行,若3种行为仍未进步则执行随机行为。而后期采用进步即可的策略,即先觅食行为,如取得进步即退出,否则执行聚群行为,这两行为均无进步则采取追尾行为,若3种行为仍未进步才采取随机行为。
2.2.2 动态调整鱼群参数
鱼群参数对算法性能有直接影响:视野越大,越利于搜索全局极值并收敛,反之则越利于局部搜索;步长越大,越易搜索全局最优,但同时降低了求解精度;拥挤度因子避免了过度拥挤而陷入局部最优,然而由于排斥作用而难以逼近精确解。参数调整原则:既要保证前期全局粗略搜索和快速收敛,也要兼顾后期对定位的最优解域进行精细搜索。调整方法为

式中:ρ1、ρ2、ρ3、ρ4表示调整系数,均大于1。分别为初始视野和拥挤度。
2.2.3 生存机制
在自然界中,如果某条小鱼长期处于缺乏食物状态(食物浓度较低),该鱼往往因生命力降低而逐渐被淘汰。尤其是在搜索中、后期,当某条人工鱼仍处于低食物浓度状态时,若继续让这条鱼存活,势必会降低群体的生存能力,影响群体的进步性。
基于上述事实,文中引入生存机制——在搜索的前期,对食物浓度较低人工鱼的鱼群参数进行调整,扩大其视野、步长,使其有更大的生存机会;而在中、后期,将食物浓度较低的人工鱼淘汰,并将其引导至最优解域附近。为此定义第i条人工鱼的生存因子为

式中:ρ5为调整系数,满足ρ5>1。


2.3 优化目标函数和算法流程
在最优控制设计中,性能指标可用Bolza代价函数表示为[19]

式中:xs为系统状态,uc为控制输入,且满足(xs,uc,t);λ1、λ2、η1、η2为欲寻优的控制参数。
在USV实际操控中,常选用一定的性能指标,比如最小跟踪误差、最小能量消耗等。
1)最小跟踪误差目标。
这种情况下,代价函数表示为

式中:L定义为USV重心与期望轨迹间的距离,L
2)最小能量消耗目标。
这种情况下,代价函数表示为

且满足约束条件

算法基本流程如下:
2)运行第+1次迭代,对寻优过程进行评估,并设定行动策略,然后动态地调整鱼群参数。
3)执行生存机制,若某人工鱼Xi食物浓度较低,则更新其鱼群参数或求解域。
4)按照行动策略,各人工鱼Xi执行觅食、聚群和追尾等行为。如果某人工鱼优于公告板,则用该人工鱼来更新公告板。
5)判断是否满足退出条件(最大迭代次数、满足寻优精度等条件)。本文以达到最大迭代次数为终止条件,即时算法退出,否则转到第2步,继续执行。
3 仿真结果与分析
为验证所提出优化算法的有效性,下面进行数值仿真对比试验。仿真软件环境为MATLAB 7.1,计算机CPU为Intel Core Duo主频2.33 GHz,内存为2 GB。仿真中USV考虑了推力和转艏力矩的饱和性限制,其具体参数如下:
考虑到USV的机动能力,选取轨迹规划的参数为

讨论如下

圆形运动轨迹。仿真初始状态设置为:x=-4 m,y=2 m,ψ=15o,u=υ=r=0。为了对比方便,以文献[16]中参数为原始控制参数 λ1,o=0.2,λ2,o=0.5,η1,o=0.001,η2,o=0.1,Φ1=0.1,Φ2=0.1 。
鱼群参数设置:根据调试经验,选取待优化参数范围为0<λ1,λ2≤5;0<η1,η2≤0.5 ,则 AAFSA的鱼群参数选为
若以式(14)为目标函数(最小跟踪误差优化目标),则可得优化后 USV 的控制参数为:λ1,T=0.95,λ2,T=0.46,η1,T=0.01,η2,T=0.07 。同理,若以式(15)为目标函数(最小能量消耗优化目标),则可得优化后 USV 的控制参数为:λ1,E=0.7,λ2,E=0.27,η1,E=0.009,η2,E=0.056 。在上述3 组控制参数下进行仿真,仿真试验结果如图2~4所示。
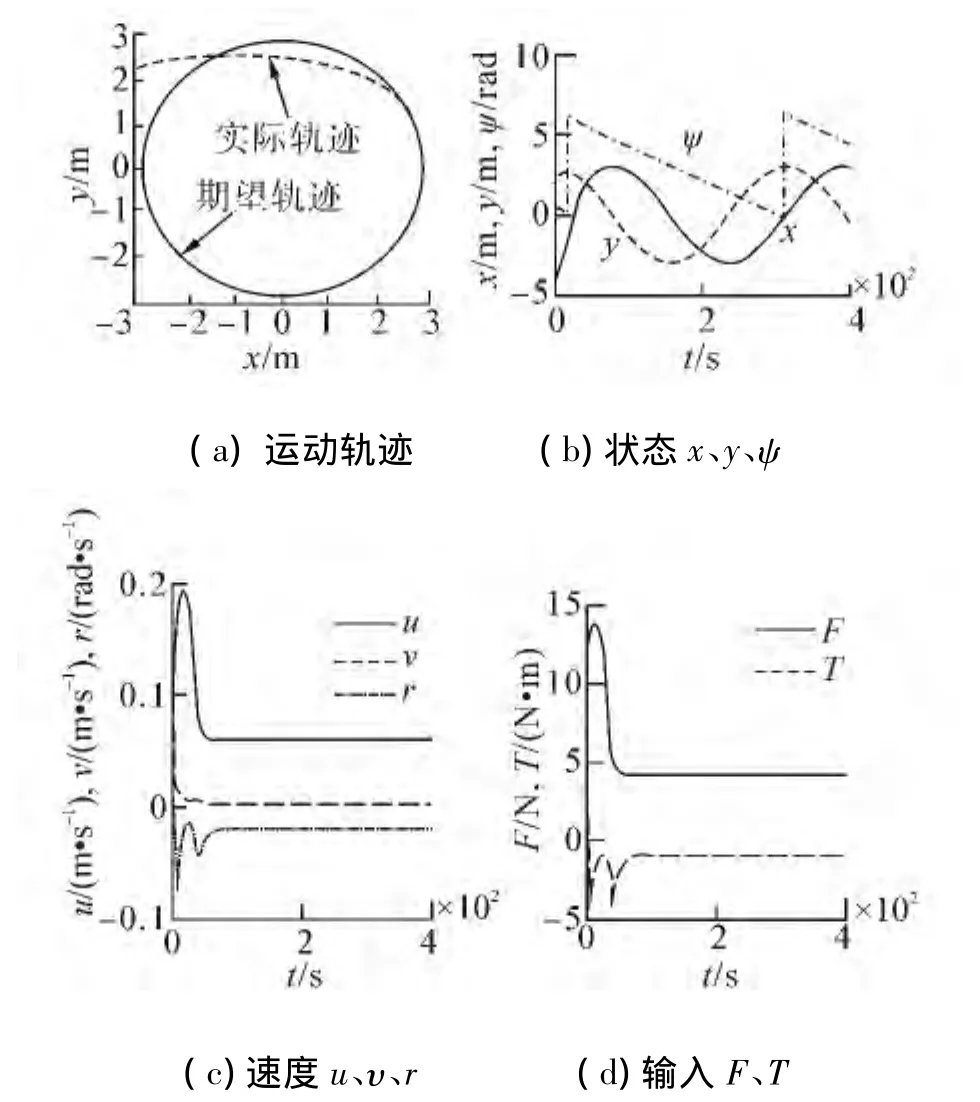
图2 原始参数下轨迹跟踪Fig.2 Response curves of USV under original parameters

图3 最小误差优化下轨迹跟踪Fig.3 Response curves of USV under minimal tracking error
从图2~4可以看出,3组参数均能驱使USV迅速地跟踪上期望轨迹,状态输出光顺、无超调,皆具有良好的动态性能。图5显示了3组参数作用下,USV的跟踪误差响应曲线。从图5可知,原始参数下的跟踪误差值为93。而最小误差优化参数下的跟踪误差值为57,减小了39%(且3组参数中,镇定时间最短);最小能量优化参数下的跟踪误差值为66,减小了29%。
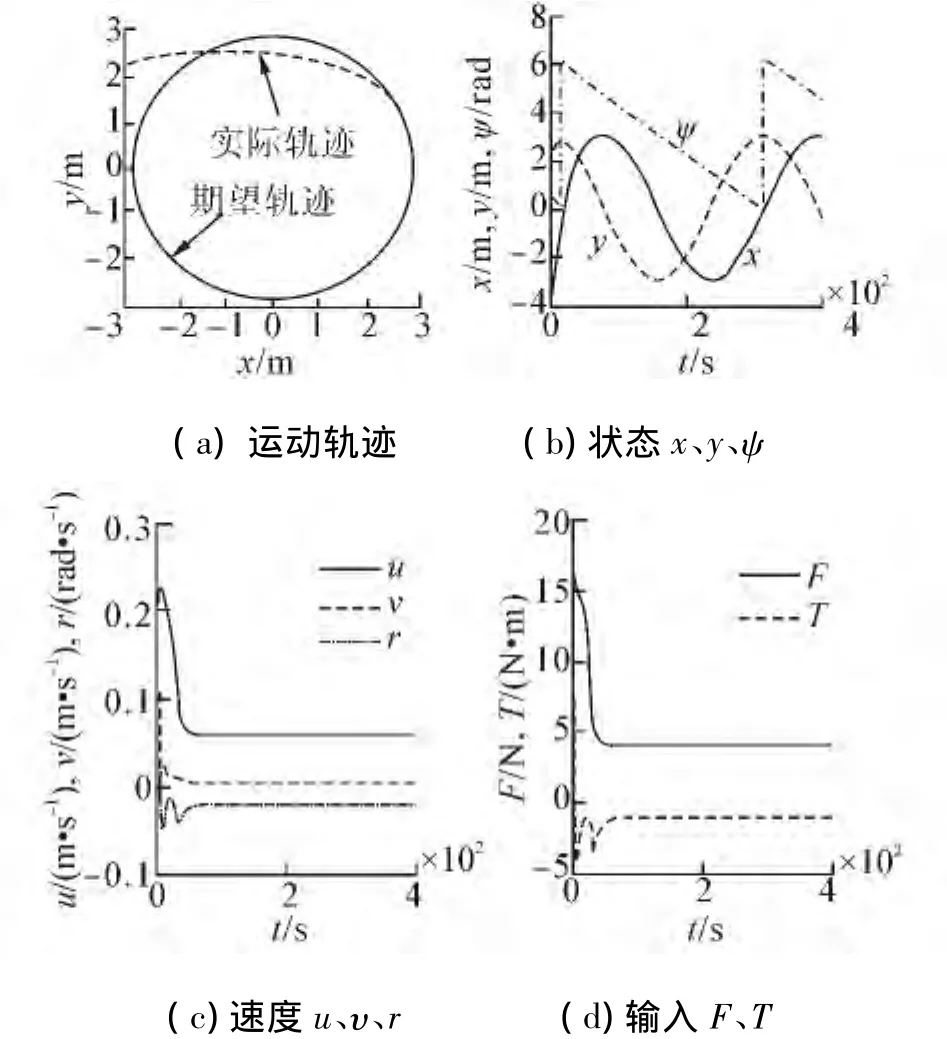
图4 最小能量优化下轨迹跟踪Fig.4 Response curves of USV under minimal energy consumption
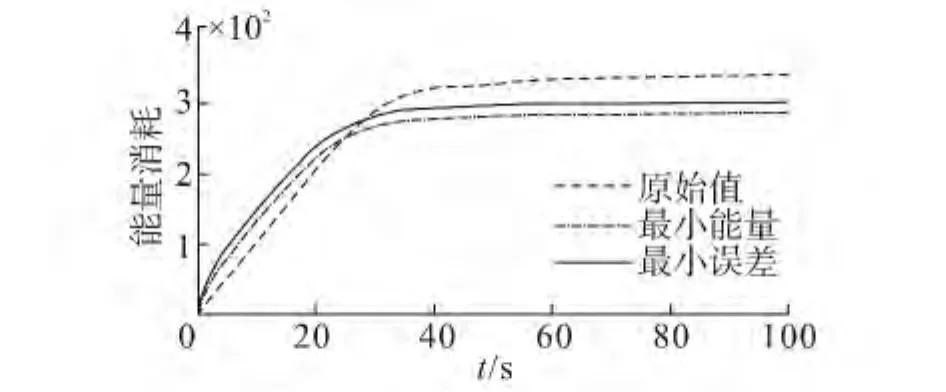
图5 跟踪误差的对比曲线Fig.5 Comparison curves of tracking error
图6显示了3组参数作用下,USV的能量消耗响应曲线。从图6可知,原始参数下的能量消耗值为351。而最小误差优化参数下的能量消耗值为308,减小了12%;最小能量优化参数下的能量消耗值为281,减小了20%,且镇定时间较短。显然,利用文中优化方法对欠驱动USV控制系统进行优化设计的控制参数,可以实现预定的优化目标,并具有良好的控制性能。
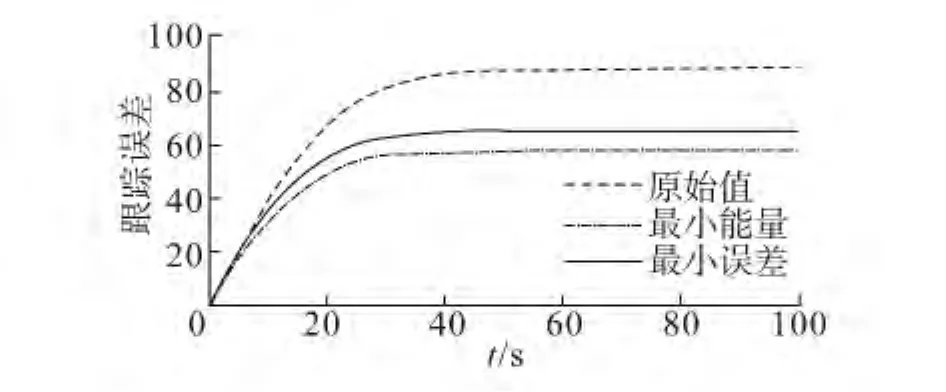
图6 能量消耗的对比曲线Fig.6 Comparison curves of energy consumption
4 结语
针对人工鱼群算法存在的问题,提出了一种改进人工鱼群算法,并成功运用该算法对欠驱动无人艇的控制参数进行了优化,得到如下结论:
1)考虑到人工鱼群算法的不足,通过引入生存机制、寻优过程评估和动态调整参数等方法,提出了一种改进人工鱼群算法。
2)利用改进人工鱼群算法,解决了欠驱动无人艇控制系统设计中的参数优化问题。仿真对比试验表明,利用该算法得到的优化参数,实现了预定优化目标,并具有良好的控制性能。
[1]VEERS J,BERTRAM V.Development of the ASV multimission surface vehicle III[C]//Proceedings of the 5th International Conference Computer and IT Application in the Maritime Industries.Leiden,Netherlands,2006:345-355.
[2]MANLEY J E.Autonomous surface vessels,15 years of development[C]//Proceedings of Oceans 2008 MTS/IEEE Quebec Conference and Exhibition.Quebec City,Canada,2008:1-4.
[3]CACCIA M,BIBULI M,BONO R,et al.Basic navigation,guidance and control of an unmanned surface vehicle[J].Autonomous Robots,2008,25:349-365.
[4]CACCIA M,BRUZZONE G,BONO R.A Practical approach to modeling and identification of small autonomous surface craft[J].IEEE Journal of Oceanic Engineering,2008,33(2):133-145.
[5]BIBULI M,BRUZZONE G,CACCIA M.Path-following algorithms and experiments for an unmanned surface vehicle[J].Journal of Field Robotics,2009,26(8):669-688.
[6]LIAO Y L,WAN L,ZHUANG J Y.Full state-feedback stabilization of an underactuated unmanned surface vehicle[C]//Proceeding of the 2nd IEEE International Conference on Advanced Computer Control.Shenyang,China,2010:70-74.
[7]XU Liying,WEN Hui,ZENG Zhezhao.The algorithm of neural networks on the initial value problems in ordinary differential equations[C]//Proceedings of the 2007 Second IEEE Conference on Industrial Electronics and Applications.Harbin,China,2007:813-816.
[8]李晓磊.一种新型的智能优化方法—人工鱼群算法[D].杭州:浙江大学,2003:1-64.LI Xiaolei.A new intelligent optimization method-artificial fish swarm algorithm[D].Hangzhou:Zhejiang University,2003:1-64.
[9]SHEN Wei,GUO Xiaopen,WU Chao.Forecasting stock indices using radial basis function neural networks optimized by artificial fish swarm algorithm[J].Knowledge-Based Systems,2011,24(3):378-385.
[10]师彪,李郁侠,何常胜,等.水轮机智能调速系统数学模型仿真及参数辨识[J].电力自动化设备,2010,30(4):10-15.SHI Biao,LI Yuxia,HE Changsheng,et al.Hydraulic turbine intelligent governing system mathematical model and its parameters identification[J].Electric Power Automation Equipment,2010,30(4):10-15.
[11]WU Huafeng,CHEN Xinqiang,SHI Chaojian,et al.An ACOA-AFSA fusion routing algorithm for underwater wireless sensor network[J].International Journal of Distributed Sensor Networks,2012,1(1):1-9.
[12]SAEED F.Efficient job scheduling in grid computing with modified artificial fish swarm algorithm[J].International Journal of Computer Theory and Engineering,2009,1(1):13-18.
[13]JIANG Mingyan,CHENG Yongming.Simulated annealing artificial fish swarm algorithm[C]//Proceedings of the 8th World Congress on Intelligent Control and Automation.Jinan,China,2010:1590-1593.
[14]廖煜雷.无人艇的非线性运动控制方法研究[D].哈尔滨:哈尔滨工程大学,2012:63-69.LIAO Yulei.Nonlinear Motion control methods of unmanned surface vehicle[D].Harbin:Harbin Engineering University,2012:63-69.
[15]廖煜雷,苏玉民,张磊.一种自适应人工鱼群算法及其在无人艇控制中的应用[J].中南大学学报:自然科学版,2013,44(10):4109-4116.LIAO Yulei,SU Yumin,ZHANG Lei.Adaptive artificial fish swarm algorithm and application in the control of unmanned surface vessel[J].Journal of Central South University:Science and Technology,2013,44(10):4109-4116.
[16]廖煜雷,庄佳园,李晔,等.欠驱动无人艇轨迹跟踪的滑模控制方法[J].应用科学学报,2011,29(4):428-434.LIAO Yulei,ZHUANG Jiayuan,LI Ye,et al.Slidingmode trajectory tacking control for underactuated autonomous surface vehicle[J].Journal of Applied Sciences,2011,29(4):428-434.
[17]廖煜雷,庞永杰.一类欠驱动机械系统轨迹跟踪的滑模控制方法[J].中南大学学报:自然科学版,2011,42(Suppl.1):219-227.LIAO Yulei,PANG Yongjie.Sliding-mode trajectory tacking control for a class of underactuated mechanical system[J].Journal of Central South University:Science and Technology,2011,42(Suppl.1):219-227.
[18]ASHRAFIUON H,MUSKE K R,MCNINCH L,et al.Sliding model tracking control of surface vessels[J].IEEE Transactions on Industrial Electronics,2008,55(11):4004-4011.
[19]MCNINCH L C,ASHRAFIUON H,MUSKE K R.Optimal specification of sliding mode control parameters for unmanned surface vessel systems[C]//Proceedings of the 2009 American Control Conference.MO,USA,2009:2350-2355.