欠驱动水面船舶非线性信息融合航迹跟踪控制
2014-10-25胡洲王志胜甄子洋
胡洲,王志胜,甄子洋
(南京航空航天大学自动化学院,江苏南京210016)
欠驱动系统是指控制输入向量空间的维数小于其广义坐标向量空间维数的系统[1]。近年来,有关欠驱动系统控制问题的挑战性引起了控制学界的关注。常规船舶是一类典型的欠驱动系统,它依靠发动机转速产生的推力和方向舵偏转产生的转弯力矩来实现水面上2个坐标位置和航向的控制。由于欠驱动水面船舶在横向上未装备驱动装置,且其动力学方程带有非完整约束条件,不满足著名的Brockett定理的必要条件[2],所以要实现欠驱动船舶的航迹跟踪控制较为困难[3]。目前,该问题已成为控制领域内的一个研究热点。文献[4-5]对欠驱动船舶的直线航迹跟踪控制的稳定性进行了研究。文献[6]利用反步技术和输出重定义提出了一种全局指数稳定的直线航迹控制方法。文献[7]基于反步法和Lyapunov直接法设计了曲线航迹跟踪控制律。文献[8]提出了一种新型的非线性滑模控制律设计方法,实现了船舶跟踪虚拟船产生的参考轨迹。文献[9]采用了一种鲁棒自适应控制策略解决了带不确定动态的船舶路径跟踪控制问题。
以上方法都不同程度的存在着局限性,或者比较简单,只考虑了直线航迹跟踪控制问题[4-6,10],或者过于复杂[7-9],难于实现。本文采用了一种非线性信息融合控制方法[11]用于解决欠驱动水面船舶的曲线航迹跟踪控制问题,该方法基于被控对象的离散状态模型实现,具有良好的工程应用前景。
1 欠驱动水面船舶控制系统建模
图1为一个欠驱动水面船舶的运动示意图。对于多数船舶的控制问题,通常只考虑船舶在水平面内的运动,即只关注纵荡、横荡和艏摇运动,而忽略垂荡、纵摇及横摇运动,本文旨在为欠驱动水面船舶的航迹跟踪控制问题找到一种新的解决方法,为了避免船舶的数学模型过于复杂,船舶水平面运动方程和动力学方程均基于如下假设条件:
1)船体坐标系的轴位于船的惯性主轴上;
2)原点在船体重心上;
3)船体质量均匀分布;
4)船关于2个坐标轴对称;
5)不考虑水流速度。
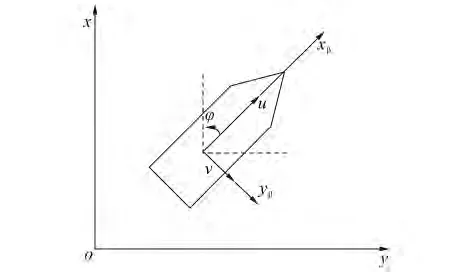
图1 欠驱动水面船舶运动示意图Fig.1 Themotion diagram of underactuated vessel
根据文献[7-8,12],欠驱动水面船舶的运动学方程和动力学方程可以表示为
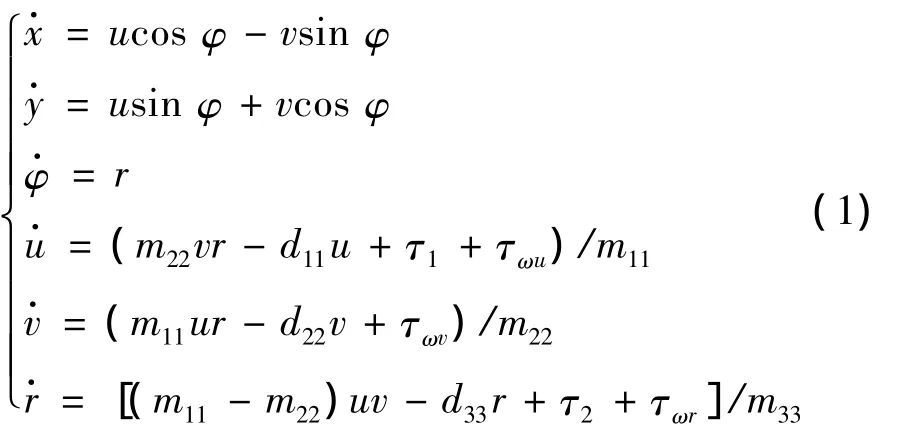
式中:m11、m22、m33为惯性参数,d11、d22、d33为水动力阻力参数,x、y为船舶在水平面参考坐标系中的位置参数,φ为航向参数,u、v分别为船舶沿本体坐标系xβ轴和yβ轴方向上的线速度,r为船舶的航向角速度,τ1、τ2分别为纵向推进力和转向力矩,τωu、τωv和 τωr为风、浪和流等环境因素引起的外界干扰,且满足有界条件 τωu≤ τωu(max)< ∞,τωv≤ τωv(max)< ∞, τωr≤ τωr(max)< ∞。
令x1=x,x2=y,x3= φ,x4=u,x5=v,x6==r,u1=τ1,u2=τ2。则式(1)变为
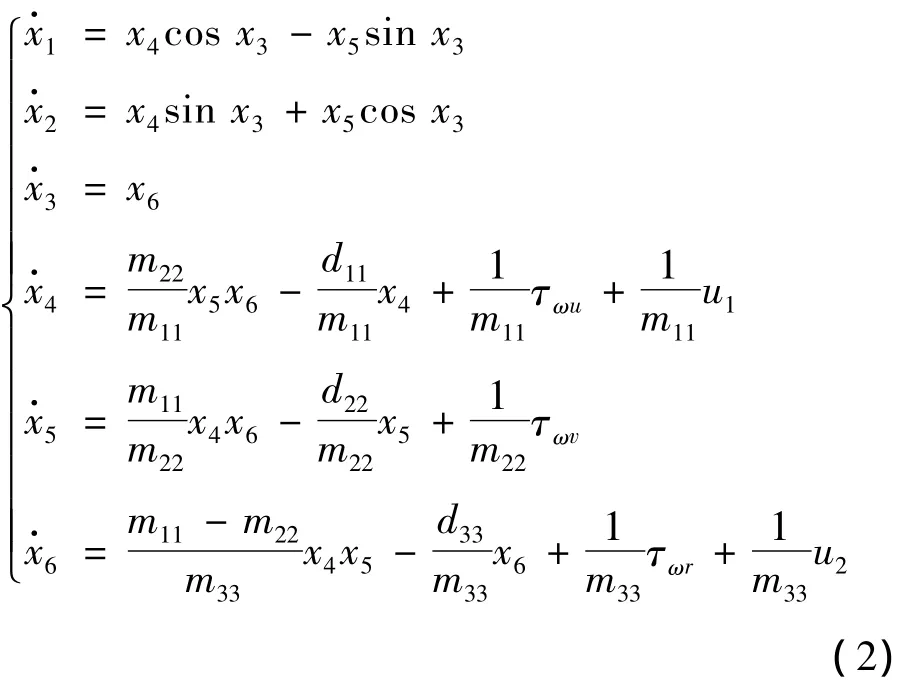
定义状态向量x=[x1x2x3x4x5x6],控制向量u=[u1u2],可将船舶控制模型简化为
非线性信息融合控制算法需要基于被控对象的离散化数学模型实现,本文采用泰勒级数法[13]:
将式(2)离散化。式中:A[n](x,u)可由如下的递归表达式依次求出:
离散化后的模型可表示为如式(3)所示的级数形式。如果采样时间T取值较大,则需要保留二阶项或更高阶项以获得较为精确的模型。一般来说,如果T≤0.1 s,则式(3)中的一阶项为主要部分,二阶及二阶以上的项可忽略。在本文中,取T=0.02 s,对式(3)保留一阶项,可得船舶系统的非线性离散状态方程如下
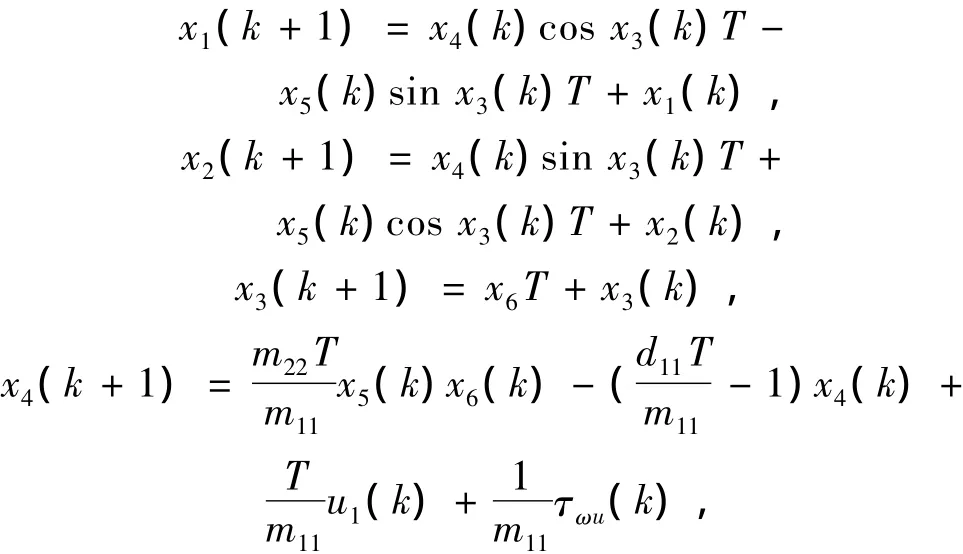
大多数船舶的控制问题通常只考虑船舶在水平面内的运动,可构造输出方程如下
2 非线性信息融合控制方法
2.1 控制问题描述
考虑非线性离散控制系统[11]:

式中:x(k)∈Rn为状态量,u(k)∈Rm为控制量,ω(k)为干扰输入,y(k)∈Rp为输出量,f(·,·)为Rn×Rm上的n维光滑向量场,h(·)是Rp上的p维光滑单调向量场。x(0)=x0。对于信息融合最优跟踪控制问题,可以建立控制性能指标:

即求出一组控制序列u(k),使该式达到极小值。式中:y*(k)为期望轨迹,上式第一项表示在控制过程中,要求各维实际输出都必须跟踪期望输出,跟踪误差要最小,Q(k)阵表示对各维输出跟踪误差的约束要求,可以看作是关于跟踪误差的信息量;第二项表示在整个控制过程中,对各维控制量的能量要求,在输出量满足指标要求的前提下,控制能量要最小,R(k)阵表示对各维控制量的能量约束要求,可以看作是关于控制能量的信息量,R(k)和Q(k)阵均为正定对称阵。
2.2 非线性信息融合控制算法设计
若将性能指标函数式(5)表示为统一的信息模式,则有y*(k)=h[x(k)]+m(k),m(k)为均值为零,方差为Q-1(k)的白噪声;0=u(k)+n(k),n(k)为均值为零,方差为R-1(k)的白噪声。
从信息融合的角度,上述控制问题共包含3部分信息:1)由式(4)所决定的等式约束信息;2)期望跟踪轨迹y*(k)的跟踪信息;3)希望每个u(k)都尽可能小的控制约束信息。信息融合控制的任务,就是融合这些信息,求出(k)。
定理1[11]若关于x的各种信息表示为


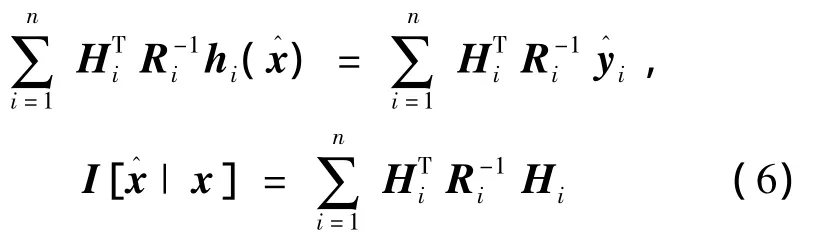
式中:Hi= ∂hi/∂x|x=x^,I[|x]表示关于 x 的信息量。定理1为非线性信息融合估计定理,式(6)为信息融合估计的统一非线性模型。称为信息关于自身的信息量,记作I[|yi]=;Hi为关于被估计量x的信息量,记作I[|x]=Hi。所有关于被估计量x的信息的信息量之和等于最优融合估计关于自身的信息量,即 I[|x] =。通常,信息量与该信息的协方差互为倒数。
式中:w(k+1)为均值为零,方差为P-1(k+1)的白噪声。将式(7)代入式(9),运用定理1融合关于u(k)的信息,可得

式中:

将式(12)、(14)代入式(11),可得

式(15)可变换为

式中:v(k)为均值为零,方差为M-1(k)的白噪声。

运用定理1,融合式(13)、(16)中关于x(k)的信息,可得

式中:

2.3 非线性信息融合控制算法流程
1)置控制向量初值u^(0)(0)=0,状态向量初值 x(0)(0)=x0,求 x(0)(k+1)=f[x(0)(k),u^(0)(k)],k=0~(kf-1),kf为预见步数。
2)置迭代序号i=1。
3)求下列偏导数:
4)置:
从上面的算法流程中可以看出,控制律的求解过程中没有求解非线性黎卡提方程,这为该算法的工程实现带来了很大的方便。
3 船舶的信息融合控制仿真研究
本文所取的船舶实验模型参数与文献[7]相同,m11=200 kg,m22=250 kg,m33=80 kg,d11=70 kg/s ,d22=100 kg/s,d33=50 kg/s。

采样周期取T=0.02 s,预见步数取kf=50步.环境干扰 τωu(t)= τωv(t)= τωr(t)=5+10sin t,下面分以下4种情况进行讨论。
情况1:期望跟踪航迹和航向分别为图2、3所示,初始状态x(0)=[0 0 0 0 0 0],Q(k)=Q1(k),无环境干扰。
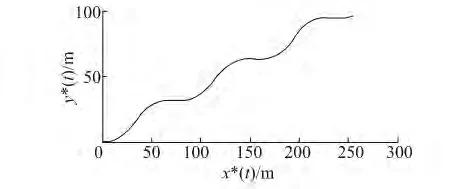
图2 期望跟踪航迹Fig.2 The expectation tracking trajectory
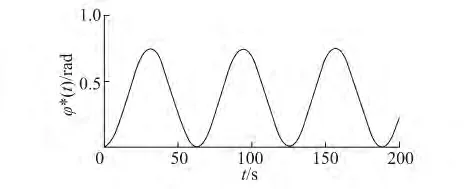
图3 期望跟踪航向Fig.3 The expectation tracking course
情况2:期望跟踪航迹、航向和初始状态保持不变,Q(k)=Q2(k),无环境干扰。
情况3:期望跟踪航迹、航向和初始状态保持不变,Q(k)=Q1(k),有环境干扰。
情况4:期望跟踪航迹为x*(t)=5cos t,y*(t)=5sin t,期望跟踪航向φ*(t)=t+π/2,初始状态保持不变,Q(k)=Q1(k),无环境干扰。
为了验证非线性信息融合控制算法对欠驱动水面船舶路航迹跟踪的控制效果,首先需要设计一条期望的航迹,可以通过运动规划解决。对于全驱动系统,运动规划总是认为系统在其位形空间内的所有运动都是允许的,然而对于欠驱动系统,因为系统受到非完整约束,并不是所有状态空间都是可达的,航迹的生成空间受到很大的限制。本文的主要目的不是讨论航迹规划问题,针对情况1~3,简单的采用开环的方法生成一条航迹,针对情况4,采用了与文献[7]相同的航迹参数。
设 ex(t)、ey(t)、eφ(t)为跟踪误差。由图4可以看出,在信息融合控制器的作用下,船舶的曲线航迹跟踪误差始终保持在一个较小的范围内,这说明了该算法对欠驱动水面船舶的航迹跟踪控制具有良好的效果。图4、5为信息权阵 Q(k)分别取Q1(k)和Q2(k)时的航迹跟踪误差曲线,可以看出,通过调节信息权阵Q(k)的取值,可以得到不同的跟踪控制效果。一般而言,增大Q(k)中的某一对角元素的值,可以改善相对应的输出量的控制效果,但其他输出量的控制效果可能会变差。如图5所示,Q2(k)中增大了横向和航向的跟踪误差信息量,所以这2个输出的跟踪误差变小,但纵向输出的跟踪误差却变得比原来大。所以Q(k)阵的取值应折衷选取。
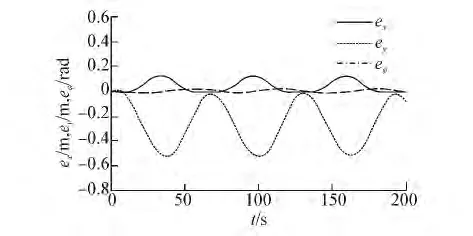
图4 情况1时的航迹跟踪误差Fig.4 The tacking error of case 1
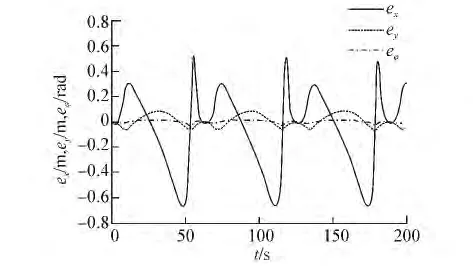
图5 情况2时的航迹跟踪误差Fig.5 The tacking error of case 2
图6为增加环境干扰后的跟踪效果,干扰分为常值扰动和正弦扰动,从图6中可以看出横向误差曲线存在一定的常值偏差,所以信息融合控制算法对横向常值扰动的抗干扰能力较弱,所有通道对正弦扰动均有良好的抗干扰能力,误差曲线都保持在一个较小的范围内没有发散,表明了信息融合控制器对环境干扰具有一定的鲁棒性能。
图7为情况4时的航迹跟踪误差,该情况与文献[7]所采用的模型参数和航迹参数相同,文献[7]基于反步法和Lyapunov直接法设计了曲线航迹跟踪控制律,综合比较可得:图7中跟踪误差曲线的收敛速度与文献[7]基本相当,跟踪效果比较理想。
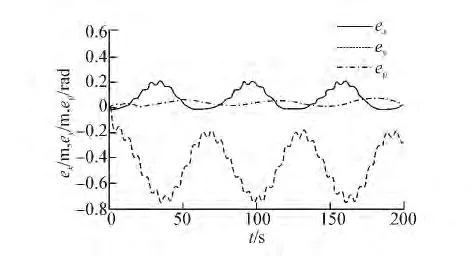
图6 情况3时的航迹跟踪误差Fig.6 The tacking error of case 3
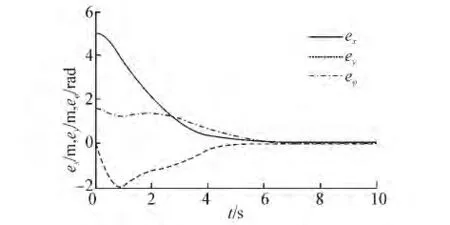
图7 情况4时的航迹跟踪误差Fig.7 The tacking error of case 4
4 结论
本文得出以下几点结论:
1)采用非线性信息融合控制算法设计欠驱动水面船舶的航迹最优跟踪控制律,可以实现对船舶位置和航向良好的同步跟踪控制,同时避免了求解非线性黎卡提方程。
2)在控制器设计过程中,信息权阵Q(k)应折衷选取,以使各输出通道具有均衡的控制效果。
3)仿真实验表明信息融合控制算法对环境干扰具有一定的鲁棒性能,但对横向常值扰动的抗干扰能力较弱。
[1]SPONG M.Partial feedback linearization of underactuated mechanical systems[C]//Proceedings of the IEEE/RSJ/GI International Conference on Intelligent Robots and Systems.Munich,Germany,1994:314-321.
[2]BROCKETTRW.Asymptotic stability and feedback stabilization[J].Differential Geometric Control Theory,1983:181-191.
[3]JIANG Z P.Global tracking control of underactuated ships by Lyapunov's direct method[J].Automatica,2003,38(2):301-309.
[4]周岗,姚琼荟,陈永冰,等.不完全驱动船舶直线航迹控制稳定性研究[J].自动化学报,2007,33(4):378-383.ZHOU Gang,YAO Qionghui,CHEN Yongbing,et al.A study of stability of straight-line tracking control system for underactuated ship[J].Acta Automatica Sinica,2006,33(4):378-383.
[5]周岗,姚琼荟,陈永冰,等.一类船舶直线航迹控制系统全局渐近稳定的充分条件及推论[J].自动化学报,2007,33(11):1204-1207.ZHOU Gang,YAOQionghui,CHEN Yongbing,et al.Suffient conditions of global asymptotic stability and deductions for ship 's straight-line tracking control systems[J].Acta Automatica Sinica,2007,33(11):1204-1207.
[6]JIANG Z P.Robust global stabilization of underactuated ships on a linear course:state and out-put feedback[J].International Journal of Control,2003,76(1):1-17.
[7]曾薄文,朱齐丹,于瑞亭.欠驱动水面船舶的曲线航迹跟踪控制[J].哈尔滨工程大学学报,2011,32(10):1317-1322.ZENG Bowen,ZHU Qidan,YU Ruiting.Curve tracking control of an underactuated surface vessel[J].Journal of Harbin Engineering University,2011,32(10):1317-1322.
[8]孟威,郭晨,孙富春.欠驱动水面船舶的非线性滑模轨迹跟踪控制[J].哈尔滨工程大学学报,2012,33(5):585-589.MENGWei,GUO Chen,SUN Fuchun.Nonlinear sliding mode tracking control of underatuated surface vessels[J].Journal of Harbin Engineering University,2012,33(5):585-589.
[9]MENGWei,GUO Chen,LIU Yang.Robust adaptive path following for underactuated surface vessels with uncertain dynamics[J].Journal of Marine Science and Application,2012,11(2):244-250.
[10]廖煜雷,万磊.欠驱动船舶直线航迹的滑模控制方法[J].应用科技,2011,38(11):13-17.LIAO Yulei,WAN Lei.Sliding-mode straight-line tracking control for underactuated vessels[J].Applied Science and Technology,2011,38(11):13-17.
[11]WANG ZS,WANG D B,ZHEN ZY.Primary exploration of nonlinear information fusion control theory[J].Science in China Series F:Information Sciences,2007,50(5):686-696.
[12]FOSSEN T I.Guidance and control of ocean vehicles[M].Upper Saddle River, New York:Wiley Interscience,1994:7-56.
[13]ZHANG Z,AN D U,KIM H,et al.Comparative study of matrix exponential and Taylor series discretization methods for nonlinear ODEs[J].Simulation Modeling Practice and Theory,2009,17(5):471-484.