幅度与频率联合测量的LOFAR浮标定位算法
2014-08-26陶林伟王英民苟艳妮
陶林伟,王英民,苟艳妮
(西北工业大学航海学院,陕西 西安710072)
被动全向浮标LOFAR(low-frequency acquisition and ranging),是声呐浮标系列中重要的一种。LOFAR的水听器没有指向性,只能被动接收目标辐射噪声,并通过对噪声中包含的线谱信息进行记录并处理来计算目标的运动参数,具有造价低廉、体积小、重量轻、方便携带等特点,在实际应用中使用最多。主要在发现目标前期使用,通过投放多个LOFAR来对目标进行粗略定位,然后使用主动全向、被动定向等浮标对目标进行精确定位[1-2]。
使用单枚LOFAR进行目标参数估计的方法主要有以下几种:1)Doppler-CPA算法(closest point of approach,CPA)最接近的距离,即目标运动过程中,离LOFAR最接近时的距离,它是LOFAR浮标的经典算法。通过记录关于CPA点对称的2次目标频率,可以近似地计算出目标运动速度和CPA[3]。2)文献[4]提出了一种改进的Doppler-CPA算法,通过引入时间信息,推导出了计算目标绝对速度和CPA的无误差理论公式[4]。上述方法必须在目标经过CPA之后才能进行计算,在使用上有一定的限制性。3)文献[5]利用目标线谱变化率信息,通过任意3次频率测量,给出了计算的目标速度和CPA的近似计算方法。实际中,由于目标的多普勒变化本来就是一个有噪声的、缓慢的过程,所以通过变化率计算目标运动参数有较大的误差。
在LOFAR研究领域中,还有其他一些方法:文献[6]给出了经典的LOFIX(LOFAR fixing)方法的原理及定位精度分析;文献[7]给出了经典的HYFIX(hyperbolic fixing)方法原理及定位精度分析;文献[8]通过使用矢量传感器阵进行被动距离测量;文献[9-14]从不同方面分析了使用LOFAR进行目标参数估计的精度;文献[15-16]从图像处理的思路入手,提高了目标频率估计精度。
本文使用单枚LOFAR,针对单个水下目标,通过等间隔采集3次目标任意时刻(不受必须经过CPA的限制)的噪声及幅度数据,推导出了无误差计算单个目标绝对速度、目标特征频率、最接近距离、绝对幅度等4个状态信息的公式。
1 测量模型
1.1 频率测量
如图1所示,目标以速度v运动,CPA为D,特征线谱频率为fT。
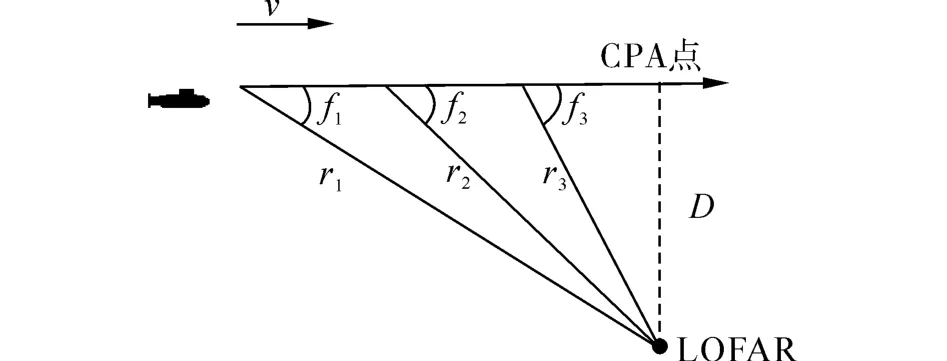
图1 目标与LOFAR运动关系Fig.1 The relationship of target and LOFAR
由多普勒频移公式,LOFAR检测到目标的线谱频率为[4]

式中:fi为第i次测量的目标频率,φi为第i次测量时目标前进方向与DIFAR浮标的舷角,c为海水中声音传播速度。
1.2 幅度测量
LOFAR浮标主要通过记录并处理目标辐射噪声中的强线谱。根据文献[17]可知,目标噪声背景中,线谱噪声主要由机械噪声和螺旋桨噪声组成,其频率范围为10~2 000 Hz。
将目标看做点声源,按球面波声传播理论,传播损失为

式中:传播损失第一项为扩展损失,第二项为声吸收损失(α为吸收系数)。根据Thorp给出的低频段吸收系数经验公式[17]:

在10~2 000 Hz范围内,吸收系数为0.000 279 ~0.12。如距离为 10 km,则扩展损失为80 dB,最大的吸收损失为1.2 dB。可以看出在低频段,吸收损失可以忽略不计。
在只有扩展损失、球面波扩展前提下,LOFAR接收到目标噪声幅度数据为[17]

式中:A为离声源单位距离处的声压振幅值,r为声源与水听器距离。
1.3 观测方程
如图 1,等间隔t1、t2、t3时刻 (t2-t1=t3-t2=Δt)测量并记录目标的频率及幅度,幅度测量如下式:

式中:pi是第i个测量的目标幅度信号,AT是等效到目标单位距离处的绝对幅度。根据几何原理,有

2 计算目标参数
2.1 特征频率
将式(1)改写为

将式(5)改写为

有

将式(9)代入式(6),并代入t1、t2、t33 个时刻测量的值,有

由于f1、f2、f3及p1、p2、p3均已知,通过式(10)即可解算出目标的特征频率:

2.2 绝对速度
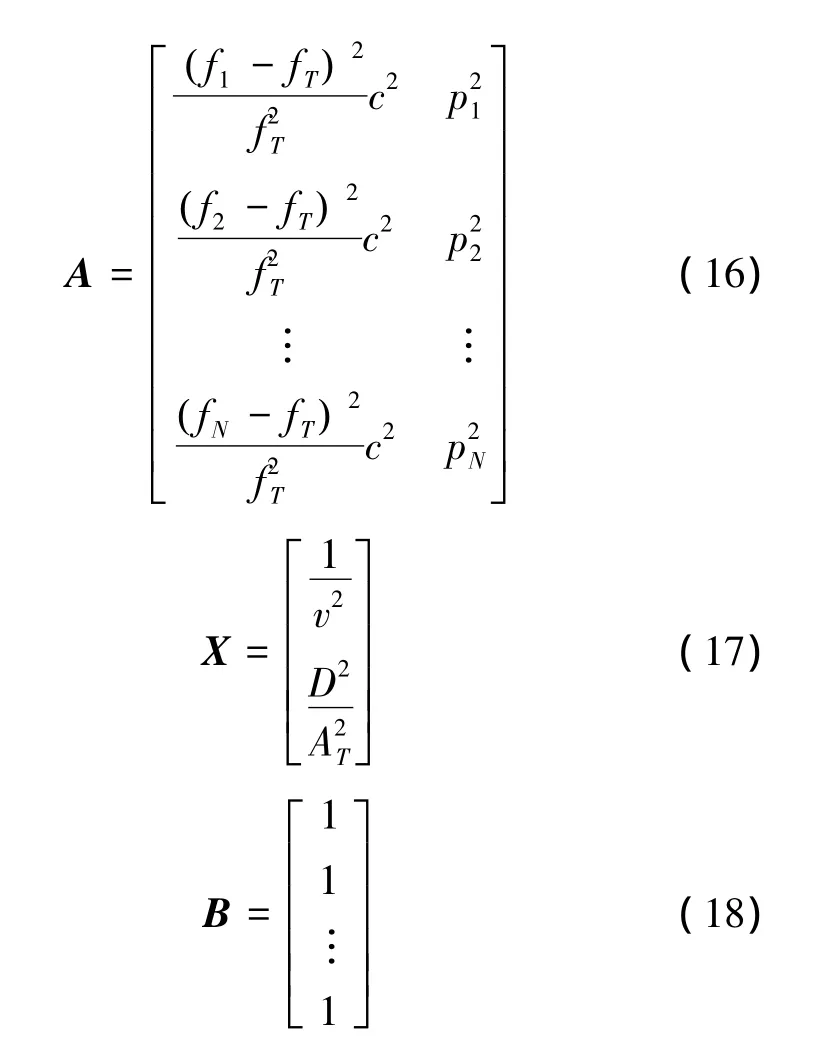
用t1、t22个时刻的测量值,根据三角函数的原理,式 (7)2+(8)2=1,有

用矩阵表示为

由于fT已知,可以解出v和
2.3 最接近点距离
3 算法改进
上述方法中,只使用了3点测量数据。在实际中,为了提高计算精度,可以使用多点数据,通过统计方法计算最佳的结果。
3.1 目标特征频率改进
对于目标特征频率,使用多点测量数据,计算出多个目标特征频率fT1、fT2…fTN,取其算术平均值作为最终的特征频率:

3.2 目标速度改进
利用多点数据,重写式(13)有:

记
在最小二乘意义下,有

3.3 最接近距离改进
对于最接近距离D及目标等效幅度AT,使用多点测量数据,取多个计算结果算术平均值作为最终结果:

4 计算机仿真
4.1 无误差仿真
首先不考虑任何误差,利用计算机仿真来验证公式的正确性。
设目标航速5 m/s,特征线谱1 000 Hz,辐射声源级134 dB,目标1 m处的等效电压AT=502.90 V(按水声接收换能器灵敏度-203 dB,浮标前放电路增益120 dB计算);LOFAR浮标位于坐标原点,与目标的最接近距离D分别为100、1 000、10 000 m等3种。
仿真软件使用Matlab;频率及幅度采样率1 Hz;声速c取1 500 m/s;以目标经过最接近点为0时刻(图1中CPA 点);取-300、-200、-100 s 3个点的目标多普勒信息及幅度信息进行计算。仿真模型和采样数据均没有误差。计算结果如表1。
由于此算法在理论上是精确的、无误差的,计算结果误差完全取决于计算过程的误差,此次仿真采用Matlab作为数值计算软件,计算精度非常高。实际中各个量的计算结果误差可以到达10-14数量级。仿真结果可以证明此算法的正确性。
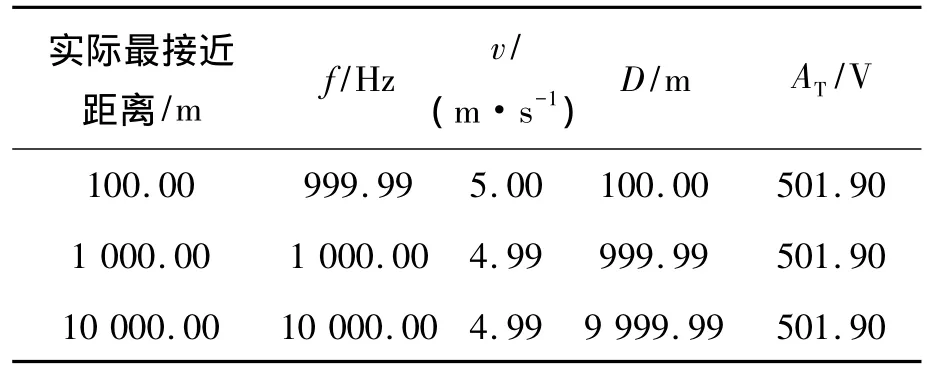
表1 无误差情况下的仿真结果Table 1 Unbiased simulation results
4.2 带误差仿真
仿真参数与4.1节中保持一致。下面给出频率测量误差和幅度误差的大小。从文献[17]中可知,深海情况下,频率1 000 Hz附近,海洋环境噪声级约为55 dB,等效噪声电压为0.056 3 V(按换能器灵敏度-203 dB,浮标前放电路增益120 dB计算)。所以在仿真中,测量的幅度信号A(k)如下:

式中:p(k)是k时刻的幅度信号,r(k)为k时刻目标与浮标的距离,nA是均方差0.053 6 V,均值为0的高斯白噪声。目前频率测量上大都使用自适应线谱增强器进行频率检测,大大改善了有色噪声下频率的测量,其测量精度可以达到0.1 Hz.如式

式中:f(k)为k时刻测量的频率值,fT(k)是k时刻目标真实频率值,nF为均方差0.1,均值为0的高斯白噪声。
在计算目标参数时,使用式(14)、(19)~(21)。计算结果如表2,计算结果相对误差如表3。

表2 噪声情况下的仿真结果Table 2 The simulation results under noise environment
可以看出,在中近距离(1 000 m)情况下,计算结果是非常好的,距离计算相对误差最大2.91,是可以满足实际使用要求的。考虑到仅仅使用单枚被动全向浮标,达到这样的结果仍然是令人满意的。
在远距离上,误差急剧增加,如在10 000.00 m情况下,速度计算误差达到26.60,已经不能满足实际需要的精度。主要原因是距离增加后,目标的频率、幅度变化量减小,与噪声幅度相当,导致计算误差非常大,甚至可能出现矩阵奇异从而不能进行计算的情况。

表3 噪声情况下结果相对误差Table 3 The simulation relative error under noise environment %
5 空气实验
5.1 实验原理
考虑到在水下进行高速目标运动实验的难度,本文在空气中进行了算法验证实验。空气声速是水中声速的0.226 6倍,多普勒频移相应增加,对目标参数估计有利。不利的因素是空气中更容易受到各种外界干扰,同时声音传播损失增加,严重降低信号信噪比。
实验地点选择在一条平直的公路上,利用汽车来模拟水下高速运动目标。实验设备分为两大部分:信号发生和采集。信号发生器部分利用汽车为载体,使用信号发生器产生一个单频信号,经过功率放大推动大功率扬声器发声来模拟水下目标的单一特征线谱。信号采集部分由高灵敏度麦克风、滤波放大器、频谱分析仪、数据采集仪、示波器组成。麦克风拾取空气中的环境噪声及目标特征频率,经过滤波、放大,最终由数据采集仪采集并存储。频谱分析仪和示波器作为监视设备分别从时域和频域对噪声信号进行观察。

图2 实验方案Fig.2 The experiment scheme
实验时(如图2),汽车以恒定速度行驶在公路上,模拟水下目标的运动,匀速通过麦克风即CPA点。信号采集部分采集环境噪声和目标线谱,并由数据采集仪存储。
实验内容主要是改变不同CPA点距离(图2中D)及车速v,利用采集的声音数据计算信号频率f,绝对幅度A,汽车的速度v及CPA点距离D,验证算法的正确性及不同因素对算法带来的影响。
5.2 处理方法
采集的噪声谱线是时域信号,为了精确估计每时刻的频率,采用短时傅里叶变换方法来估计频率,每次FFT变换长度256个采样点,FFT重叠率50%,FFT算法长度1 024。获得每个时间段的FFT后,选择幅度最大的频率点作为此时刻段的频率测量值。对计算后的频率信号进行平滑滤波,使用32阶FIR低通滤波器,低通截止频率100 Hz。
5.3 实验结果及分析
实验过程中,麦克风灵敏度-45 dB,麦克风频率响应50 Hz~18 kHz;放大器增益60 dB;滤波器通带频率范围为0~20 000 Hz;数据采集仪采样频率5 000 Hz。实验取了4种不同的最接近点距离l,分别为7、11.6、15、20 m(由于实际公路环境的限制,距离最大为20 m);车速v选取了4种速度,20、40、60、80 km/h;信号频率为 1 000 Hz;信号驱动采用电池作为能源,信号幅度不变,有效值15.55Vrms;数据处理时空气中声音传播速度取c=340 m/s。
给出几个典型处理结果如图3。图为CPA点距离 11.60 m,速度分别为 20、40、60、80 km/h,特征频率1 000 Hz处理得到的目标通过CPA点的时频累积图。图中亮度越高,表示信号幅度越大。当汽车接近时,信号频率大于实际频率(1 kHz),多普勒为正。当汽车离开时,信号频率变小,多普勒为负。频率曲线的拐点处,即是通过CPA点的时刻。可以明显看出,当车速越高时,CPA点的变化率越大。

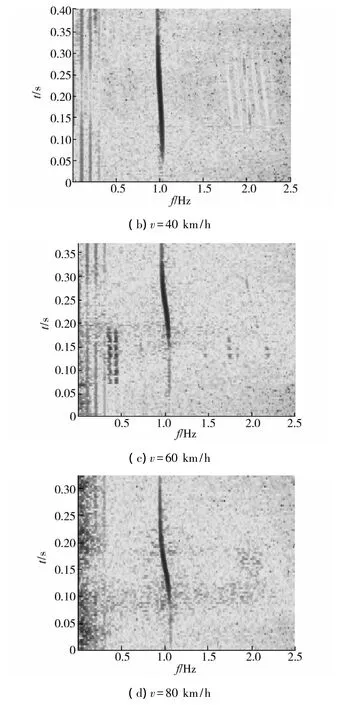
图3 处理后的时频结果Fig.3 The results of time-frequency processing
整个实验过程共计13次有效过程,在计算机上对频率和信号幅度进行运算处理,得到结果如表4。
从表2的实验结果来看,实验取得了较好的结果,大部分过程(除6号实验外)很好的估计出目标运动参数,计算距离相对误差平均值为3.95%,最大9.90%;频率计算相对误差平均0.19%,最大0.38%;速度计算相对误差平均2.85%,最大4.77%;幅度计算相对误差平均3.19%,最大9.71%。
根据实验结果分析:最接近距离对计算误差影响最大,与计算机仿真结果一致,当距离越远,计算误差越大;频率估计最为精确,原因是频率信号相对其他信号抗干扰能力更强,同时,此方法直接测量频率信号,不存在误差在计算过程的传递;速度估计比距离、绝对幅度估计精度高,这是由于多普勒频移直接和速度相关,由于频率估计精度较高,所以速度估计的精度也得到提高;最接近距离和绝对幅度的估计精度最差,其中距离的计算依靠频率信号的变化,当距离远时,相对速度减小,频率信号变化率降低,相当于信噪比减小,所以计算结果精度降低,而对信号幅度来说,外界干扰直接加入幅度信息,导致幅度估计精度较差。例如在第6号实验时,旁边有重型卡车通过,在低频300 ~500 Hz附近,0.075 ~0.18 s时间范围内,带来较强的宽带干扰,有强的干扰导致,如图3(c),导致参数计算精度降低。

表4 实验结果Table 4 Experimental result
6 结论
本文将水下目标幅度信息加入到被动浮标的目标参数计算过程中,通过任意3次等间隔测量,使用目标的幅度和频率信息,在理论上给出了无误差计算公式,获得目标的运动速度、最接近距离、特征频率、绝对幅度等4个重要参量,这对浮标算法的研究具有重要的意义。
该方法不需要克服以前方法的一些不足之处:1)不需要经过CPA点即可完成计算,使LOFAR的解算速度、效率提高,战术更加灵活;2)在理论上是一个无误差的方法,对LOFAR浮标算法的研究具有重要理论意义。
通过计算机仿真及空气,证明该方法在较小的最接近距离情况下,可以获得不错的结果。各个参数估计相对误差小于10%,这对于仅仅使用单个被动全向浮标来说仍然是不错的结果。对工程实际来说,此方法仅仅使用最简单的单枚被动全向浮标,在近距离上,可以较精确的估计出目标的距离、速度、频率、幅度,具有非常好的应用前景。同时该方法可以直接应用到其他领域,如公路测速,使用单个麦克风即可测量汽车行驶速度和噪音幅度等级等。
[1]凌国民,王泽民.声呐浮标技术及其发展方向[J].声学与电子工程,2007(3):1-5.LING Guomin,WANG Zemin.Sonobuoy technology and its development direction[J].Acoustic and Electronic Engineering,2007(3):1-5.
[2]吴运发,孙乃宏.反潜的关键设备—声呐浮标的现状和发展[J].声学技术,1999,18:95-96.
[3]陶林伟.基阵浮标信号处理系统及算法研究[D].西安:西北工业大学,2009:58-60.TAO Linwei.Study on array sonobuoy signal processing system and algorithm[D].Xi’an:Northwestern Polytechnical University,2009:58-60.
[4]陶林伟,王英民.声呐浮标多普勒最接近法的一种新算法[J].系统仿真学报,2008,20(23):6353-6355.TAO Linwei,WANG Yingmin.New algorithm for sonobuoy doppler-CPA[J].Journal of System Simulation,2008,20(23):6353-6355.
[5]郁涛.对水下目标的多普勒直接定位[J].中国电子科学研究院学报,2011,3:328-330.YU Tao.Doppler direct location for underwater target[J].Journal of China Academy of Electronics and Information Technology,2011,3:328-330.
[6]胡柱喜,孙明太,苏维国,等.被动全向浮标LOFIX定位精度仿真分析[J].电光与控制,2009,16(12):26-29.HU Zhuxi,SUN Mingtai,SU Weiguo.Simulation analysis of LOFIX fixing accuracy for passive omni-directional sonobuoy[J].Electronics Optics & Control,2009,16(12):26-29.
[7]孙辉,孙明太,刘京莲.被动全向浮标HYFIX定位精度仿真分析[J].电光与控制,2010,17(1):85-88.SUN Hui,SUN Mingtai,LIU Jinglian.Simulation analysis on HYFIX locating accuracy of passive omni-directional sonobuoy[J].Electronics Optics & Control,2010,17(1):85-88.
[8]LI Jian,SUN Guiqing,HAN Qingbang.Acoustics vector sensor linear array passive ranging based on waveguide invariant[C]//Proceedings of the 3rd International Conference on Ocean Acoustics.Beijing,China,2012:576-586.
[9]BRIAN G F,KAM W L.Passive ranging errors due to multipath distortion of deterministic transient signals with application to the localization of small arms fire[J].J.Acoust Soc Am,2002,111(1):117-128.
[10]毛卫宁.水下被动定位方法回顾与展望[J].东南大学学报,2001,31(6):1-4.MAO Weining.An overview of passive localization for under-water acoustics[J].Journal of Southeast University,2001,31(6):1-4.
[11]薛山花,叶青华,黄海宁,等.利用近场MVDR双聚焦波束形成方法实现被动测距[J].应用声学,2005(3):177-181.XUE Shanhua,YE Qinghua,HUANG Haining,et al.Passive-range estimation using near-field MVDR dual focused beamformers[J].Applied Acoustics,2005(3):177-181.
[12]SHANG E C,CLAY C S,WANG Y Y.Passive harmonic source ranging in waveguides by using mode filter[J].J Acoust Soc Am,1985,78(1):172-175.
[13]MA J G.Passive localization technology of time reversal[D].Harbin:Harbin Engineering University,2007:30-43.
[14]COCKRELL K L,SCHMIDT H.Robust passive range estimation using the waveguide invariant[J].J Acoust Soc Am,2010,127(5):2780-2789.
[15]YANG Peng,YUAN Bingcheng,ZHOU Sheng.A line spectrum estimation method of underwater target radiated noise base on theD spectrum[C]//2010 International Conference on Innovative Computing and Communication and 2010 Asia-Pacific Conference on Information Technology and Ocean Engineering,2010:297-299.
[16]FAN Yangyu,TAO Baoqi,XIONG Ke,et al.Feature extraction of ship radiated noise by-spectrum[C]//Acta Acustica,2002:71-76.
[17]刘伯胜,雷家煜.水声学原理[M].哈尔滨:哈尔滨船舶工程学院出版社,1993:34.