基于卡尔曼滤波重建的GPS点位修正
2014-08-25徐爱功吴探诗张建龙
徐爱功,吴探诗,隋 心,张建龙
(辽宁工程技术大学 测绘与地理科学学院,辽宁 阜新 123000)
基于卡尔曼滤波重建的GPS点位修正
徐爱功,吴探诗,隋 心,张建龙
(辽宁工程技术大学 测绘与地理科学学院,辽宁 阜新 123000)
由于单点定位的结果受卫星星历误差、卫星钟误差以及卫星信号传播过程中大气延迟误差的影响较为显著,因此解算出的定位结果在真值附近上下浮动。文中采用ARMA模型建立卡尔曼滤波的观测方程和状态方程,并对定位结果进行滤波;采用一次滤波后的坐标值作为初值,建立ARMA模型并二次滤波。实验表明,滤波有效防止了定位结果偏差过大情况的发生,使滤波收敛值与准确值最大偏差不超过3 cm,表明采用一次滤波后的坐标值建立的模型更为合理,从而为单点定位结果的时间序列模型的建立提供一种新方法。
单点定位;时间序列;卡尔曼滤波;ARMA模型
在现阶段的单点定位结果中,包含许多误差,使得定位结果偏差较大,不能总是反应真实的时间序列变化情况。由于通过一次滤波的坐标值更接近真值,因此可以作为一组新的时间序列的初值,以达到高精度建模的目的。
对于时间序列,需要判断时间序列是否平稳,如果不平稳,需要转换为平稳的时间序列,然后利用过去的时间序列估计自回归模型或滑动平均模型的系数,以此来将时间序列模型化。
ARMA模型是描述平稳随机序列的最常用的一种模型。在建立ARMA模型之后,可转换成状态方程,同时与观测方程构成卡尔曼滤波的两个基础方程。
卡尔曼滤波仅需要前一时刻的状态估值和当前观测值[1-3],对于计算机运算,卡尔曼滤波的运算量和存储量大为减少,容易满足实时的要求。
1 ARMA模型和卡尔曼滤波模型
为建立ARMA模型,需要利用样本观测值计算自相关函数和偏自相关函数。
自相关函数为
(1)

偏自相关函数为
k=1时
k≥2时
(2)
1.1 ARMA模型定阶方法
3)如果对于自相关序列和偏相关序列来说,均不截尾,此时,即可以判定平稳时间序列为ARMA模型。
利用上述定阶方法,通过C++程序,确定出数据适用于AR(2)模型与MA(1)模型,在此,采用AR(2)模型(此处考虑到y,z坐标也适用于此)。
AR(2)模型
yt=Φ1yt-1+Φ2yt-2+εt.
(3)
由Yule-Walker估计,二阶自回归模型参数
(4)
1.2 卡尔曼滤波模型
系统模型[5-6]
xk=Φk,k-1xk-1+Γk,k-1wk-1,wk~N(0,Qk).
(5)
状态预测
(6)
测量模型
zk=Hkxk+vk,vk~N(0,Rk).
(7)
误差协方差预测
(8)
卡尔曼增益
(9)
状态估计校正

(10)
误差协方差估计校正
分别于水稻移栽后和收获期采集土样。土壤样品风干、研磨、过0.83 mm(20目)、0.25 mm(60目)及 0.15 mm(100目)尼龙筛。土壤样品用HNO3-HClO4-HF消化,再用HPLC-ICP-MS测定重金属含量。
Pk|k=[I-KkHk]Pk|k-1.
(11)
由式(2)变形为系统模型
(12)
则测量模型为
(13)
2 模型实现和卡尔曼滤波状态方程的重新建立
数据采用日本东京海洋大学Takasu等人研发的基线解算与定位软件RTKLIB中的rtkpost模块所处理生成的单点定位结果。对于单点定位的坐标(仅以x轴坐标前100个历元为例),均值为 2 489 170.012 65,方差为 0.155443,样本零均值化后的坐标X~N(0,0.155443)。图1为坐标的时间序列,初步确定数据具有平稳性。

图1 零均值化后的坐标时间序列
2.1 模型实现
利用式(1)、式(2),通过程序对结果输出的自相关函数和偏自相关函数图形如图2、图3所示。
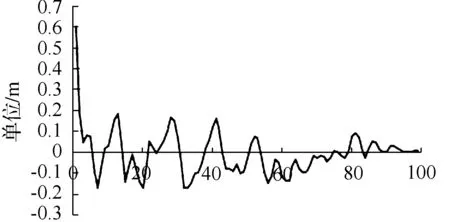
图2 自相关函数图

图3 偏相关函数图
求出式(4)两参数0.781805和-0.290 396,则可以通过式(3)对下一时刻观测值进行预测。预测值与实测值的差的期望几乎为0,方差为0.089,服从标准正态分布。(由于上述模型估计为粗估计,所以通过循环测试0.781805±2,-0.290 396±2范围内的参数情况下的预测方差,结果粗估计的方差最小,达到了精估计的目的)。


图4 滤波前后比较
由图4可见,滤波后的坐标数据更接近真值,波动幅度大大减小,程序显示,滤波收敛值与准确值最大偏差不超过15cm,状态估值的方差逐渐稳定于5cm,滤波结果可信度高,滤波效果显著。
为增加可靠性,笔者在y轴和z轴进行同样的测试,取得较好的效果,说明模型的建立是合理的。
2.2 卡尔曼滤波状态方程的重新建立

利用新建立AR模型重新滤波的结果见图5。

图5 重新滤波结果
由图5中实线可知,再次滤波的状态估值更接近真值。程序显示,滤波收敛值与准确值最大偏差不超过3 cm,方差逐渐稳定于5mm。
3 结 论
1)采用AR模型和卡尔曼滤波模型能够对坐标值进行有效滤波,防止定位结果偏差过大、粗差情况的出现,并进行修正。
2)采用了更加逼近真值的一次滤波后的坐标值来建立AR模型,模型更加准确,其预测精度有了较大提高,滤波效果也更加明显。
3)实验采用伪距单点定位结果进行二次滤波。而此基于卡尔曼滤波重建的点位修正方法,可以推广到其他定位结果的数据处理中,通过提高模型的精度来提高定位结果精度。
[1]祁芳. 卡尔曼滤波算法在GPS非差相位精密单点定位中的应用研究[D]. 武汉:武汉大学,2006.
[2]杜晓辉,任章. 基于卡尔曼滤波的GPS静态定位精度分析[J].全球定位系统,2008(5):47-51.
[3]付梦印,邓志红,闫莉萍.Kalman滤波理论及其在导航系统中的应用[M].北京:科学出版社,2010.
[4]张勇,田林亚,马丙浩,等. 卡尔曼滤波在GPS 精密单点定位中的应用研究[J].测绘通报,2013(7):8-15.
[5]邹程昊. GPS导航中系统误差的卡尔曼滤波方法研究 [D].长沙:中南大学,2012.
[6]洪海斌,郭杭,殷红,等. 一种提高导航精度的改进滤波方法 [J].测绘通报,2013(6):9-11.
[7]董绪荣,陶大欣. 一个快速Kalman滤波方法及其在GPS动态数据处理中的应用[J].测绘学报,1997,26(3):221-227.
[8]赵琳,李亮,黄卫权. 自适应卡尔曼滤波在载波相位平滑伪距中的应用[J].哈尔滨工程大学学报,2010,31(12):1636-1641.
[9]李冲,黄观文.抗差自适应卡尔曼滤波在GPS精密单点定位中的应用[J].测绘科学,2011,36(4):22-23.
[10]安潇潇. ARMA相关模型及其应用[D]. 秦皇岛:燕山大学,2008.
[责任编辑:刘文霞]
GPS point correction based on Kalman filter reconstruction
XU Ai-gong, WU Tan-shi, SUI Xin,ZHANG Jian-long
(School of Geomatics, Liaoning Technical University, Fuxin 123000,China)
The single point positioning results are affected markedly by the satellite ephemeris error, the satellite clock error and the atmospheric delay error. So the calculated positioning results fluctuate around the truth value. ARMA model is used to establish the Kalman filter observation equation and state equation, and filtere the positioning results. The coordinate values are used as the first time filtering which is regard as initial value to establish ARMA model and carry out second time filtering.The experiments show that it can effectively prevent the big deviation of positioning results and the maximum deviation between filtering convergence value and accurate value is less than 3cm. It shows that the model established by first time filtering coordinate value is more reasonable. So a new method for the establishment of single point positioning time-series model is provided.
single point positioning;time-series;Kalman filter;ARMA model
2013-10-25
现代城市测绘国家测绘地理信息局重点实验室开放课题资助项目(20111203W)
徐爱功(1963-),男,教授,博士生导师.
P228.4
:A
:1006-7949(2014)10-0001-03
