小基高比摄影测量方法及实验分析
2014-08-25申二华范大昭戴海涛孙晓昱
申二华,范大昭,戴海涛,孙晓昱
(信息工程大学 地理空间信息学院,河南 郑州 450000)
小基高比摄影测量方法及实验分析
申二华,范大昭,戴海涛,孙晓昱
(信息工程大学 地理空间信息学院,河南 郑州 450000)
传统摄影测量在影像分辨率给定的前提下,为获得尽可能高的高程精度,基本上都采用大基高比(0.6~1)的方案,以实现地形三维信息的可靠高精度的提取。在影像获取系统严格标定和影像匹配精度较高的情况下,小基高比摄影测量同样可以重建可靠的三维信息。文中从数学的角度探讨小基高比立体像对重建高程信息的可能性。对不同基高比的航空影像进行的实验表明,在特征明显区域小基高比立体像对可以获取可靠的高精度的高程信息。
小基高比;相关系数;匹配精度;视差
传统摄影测量在建筑物密集、高度起伏变化较大的城市地区测绘中容易造成较大的辐射和几何差异(畸变、遮挡、运动目标影响等),使得相关匹配处理起来非常困难[1-2],导致获取高精度、大比例尺地形三维信息的自动化程度相对较低,难以满足快速获取的需求。
采用小基高比立体观测模式,可以很好地避免上述不利因素,特别是在城市大比例尺立体测绘中有更多的优势,可克服大基高比摄影测量在城市测绘中遮挡多、“死区”多、数据获取效率低的缺陷[2],如图1所示,为高效率获取城市地区DSM/DEM提供了新的手段与方法,为高精度影像处理提供了辐射特性较为一致、几何变形小的立体影像数据源,为大幅提高自动化处理效率奠定基础。然而,随着基高比的降低,也必然会带来交会精度的降低,需要研究高精度的影像匹配算法予以弥补。
在小基高比摄影测量的研究上,法国人走在前列,Neus Sabater等人研究了小基高比摄影测量的有关理论与方法[3],开发出MARC、MARC2等适用于小基高比影像的高精度匹配算法[4-6],用航空平台对小基高比摄影测量技术进行全面试验,初步验证该技术的可行性[7]。
在国内,门朝光、边继龙等人从计算机视觉的角度研究了小基高比条件下的立体匹配算法[8-11],初步验证其算法能达到较高的匹配精度,能够弥补小基高比给高程信息带来的损失。
本文从理论和实验的角度探讨小基高比立体测量的可行性。通过分析发现,匹配误差可以分为两项,其中一项因噪声产生且与基高比有关,另外一项只与影像匹配算法有关。由于小基高比条件下影像相关程度较高,影像匹配精度更高,可以通过设计高精度的影像匹配算法降低噪声对匹配误差造成的影响。

图1 大小基高比立体成像盲区比较
1 模型构建与假设

(1)



(2)
在窗口函数φ约束下,先做如下约定:
φx0:x→φ(x0-x),表示窗口偏移函数。
对于任意可积函数f:
(3)
对于任意平方可积函数f:

(4)
对于任意可积函数f和g,

(5)
(6)

(7)
其中,τm(x):x→u(x+m)为影像u在x处的偏移函数。视差估计值m(x0)并不严格等于真实视差ε(x0),接下来重点讨论m(x0)和ε(x0)的关系。
2 无噪声条件下的影像相关
在接下来的讨论中,假设影像已纠正为核线影像,同名像点的查找在一维空间内搜素,导数的方向沿核线方向。

(8)
假设在ρx0取得最大值时,窗口函数为φx0,真实视差ε和视差估计值m(x0)满足|ε(x)-m(x0)|≤1,真实视差ε和视差估计值m(x0)有如下近似关系:

(9)
证明:ρx0的一阶导数为


≃u(x+m(x0))+
u′(x+m(x0))(ε(x)-m(x0)).


即:


3 有噪声条件下的影像相关

(10)
其中,由于式(2)中λ值几乎不会对相关系数造成影响,这里设λ=1,gb为高斯噪声b(标准差为σb)和平滑函数g的卷积。

(11)
m(x0)的计算会受到噪声的影响,噪声造成的匹配误差的近似关系式为

(12)
4 基高比对高程定位精度的影响


(13)
在没有噪声的情况下,高程精度与基高比无关,只与影像匹配算法有关,则
(14)
在实际中噪声所造成的误差影响为

(15)
对Zreal的估计中,误差分为两项,误差E1取决于相关匹配,误差E2取决于噪声,只有E2与基高比有关。假设x0为影像u中任意点,若基高比b0/h0满足E1(x0)≥E2(x0,b0/h0),这时只要满足基高比b/h≥b0/h0,x0处的高程定位精度与基高比b/h无关。
5 实验与分析
为了验证小基高比条件下立体像对能够获得高精度高程信息,本文实验所用数据为5张连续具有一定重叠度的UCD航空遥感影像(为方便实验,影像从大幅影像中截取),影像大小均为800像素×900像素,如图2所示,分辨率为0.05m,焦距f为101.4 mm,像元大小为0.009 mm,外方位元素如表1所示。影像1和影像2、影像3、影像4、影像5分别组成基高比为0.12、0.23、0.35、0.47的立体像对,从影像中可以看出随着基高比的增大,几何差异增大。
实验所用技术方案如图3所示,对5张连续UCD高分辨率航空影像分别进行特征提取,将影像1和影像2、影像3、影像4、影像5组成的立体像对分别进行特征匹配处理,然后查找4个匹配结果中左像点相同的点,进行最小二乘匹配和前方交会处理,并生成地面点坐标文件。
实验1:利用整像素级SIFT匹配结果进行前方交会。该实验利用生成的82组整像素级SIFT特征匹配结果进行前方交会处理。像对4基高比为0.47,比像对1、2和3的基高比大,可以认为其前方交会的结果最可靠,因此将其计算得到的地面点坐标作为基准,分别计算像对1、像对2、像对3地面点坐标在X,Y,Z3个方向上的中误差,如表2所示。

图2 5张航空影像

表1 影像外方位元素

图3 不同基高比立体像对实验流程

表2 实验1统计结果
实验2:利用子像素级SIFT匹配结果进行前方交会(内插二次曲面精确确定特征点的位置)。该实验利用生成的82组子像素级匹配结果进行前方交会处理。将像对4计算得到的地面点坐标作为基准,分别计算像对1、像对2、像对3地面点坐标在X,Y,Z3个方向上的中误差,如表3所示。
实验3:对整像素级SIFT匹配结果经最小二乘匹配后前方交会。该实验对实验1中生成的整像素级匹配结果进行最小二乘匹配处理,然后进行前方交会。将像对4计算得到的地面点坐标作为基准,分别计算像对1、像对2、像对3地面点坐标在X,Y,Z3个方向上的中误差,如表4所示。

表3 实验2统计结果
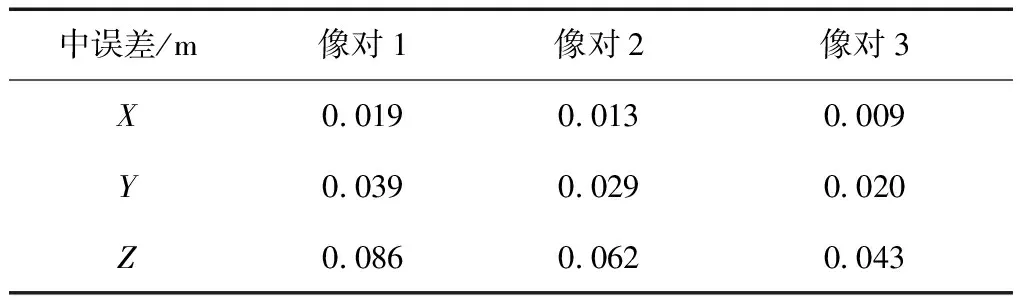
表4 实验3统计结果
从实验1可以看出,影像匹配精度为整像素级时,基高比为0.12的立体像对的高程定位精度较差,约为5个GSD,对平面定位精度影响相对较小。随着基高比的增加,像对2和像对3的高程定位精度和平面定位精度都得到有效提升,说明影像匹配精度较差时,小基高比立体像对不能获得高精度的地面定位结果。
从实验2和实验3可以看出,影像匹配精度较高时,像对1、像对2、像对3的地面定位精度都得到大幅度提升,即使是基高比为0.12立体像对的高程定位精度也小于2个GSD。实验3中像对1、像对2、像对3的地面定位精度较实验2有轻微幅度的提升,说明最小二乘匹配的精度更高。因此,在小基高比条件下,高精度的影像匹配结果可以弥补交会精度的缺失,小基高比立体像对同样可以获得高精度的地形三维信息。
6 结 论
1)本文从数学的角度探讨小基高比条件下重建高程信息的可行性,并利用不同基高比的影像实验,验证在特征明显区域小基高比立体像对同样可以获取可靠的高精度的高程信息。
2)实验采用特征明显的区域进行处理,取得较好的验证结果。在小基高比条件下,对于特征贫乏的区域,若想获得可靠的高程精度,则需要研究新型的高精度影像匹配算法,进而有效提高其影像匹配精度和高程定位精度。
[1]方勇,李瀛搏,崔卫平,等.高分辨率大面阵相机航天测绘应用立体探测模式分析[J].测绘科学与技术学报,2011, 28(4):235-240.
[2]邹峥嵘,谢萍,刘明远,等.基于相对定向和三角形约束的近景影像匹配[J].测绘工程,2011,20(5):21-25.
[3]JULIE D,BERNARD R. Small baseline stereovision [J]. Journal of Mathematical Imaging and Vision, 2007, 28(3): 209 -223.
[4]SABATER N, BLANCHET G, MOISAN L, et al .Review of Low-Baseline Stereo Algorithms and Benchmarks[J]. IJCV, 2004,60(2):91-110.
[5]SABATER N, MOREL J M.Block Matching Reaches Theoretical Accuracy Bounds[J]. ICIP,2010,3(4):168-172.
[6]SABATER N, MOREL J M, ALMANSA A. Huhns.Sub-Pixel Stereo Matching[J].Computer Vision,Graphics and Image Processing, 1986,35(2):220-233.
[7]L IGUAL, J PRECIOZZI, L GARRIDO. Automatic Low Baseline Stereo in Urban Areas[J].Inverse Problems and Imaging, 2007,1(2):319-348.
[8]边继龙, 门朝光,李青. 基于小基高比的快速立体匹配方法[J]. 电子与信息学报,2012,34(3):517-522.
[9]门朝光, 边继龙,李青. 基于迭代传播的小基高比立体匹配方法[J]. 中南大学学报:自然科学版, 2012, 43(4):1362-1368.
[10]李金凤, 边继龙,纪明宇. 基于最大似然估计的小基高比立体匹配方法[J]. 计算机应用研究, 2012, 29(4):1578-1560.
[11]谢建春,潘宝玉,苏国中,等.一种提高大比例尺航测精度的方法试验研究[J].测绘科学,2013,38(5):5-8.
[责任编辑:张德福]
Small baseline photogrammetry method and experiment analysis
SHEN Er-hua,FAN Da-zhao,DAI Hai-tao,SUN Xiao-yu
(Institute of Surveying and Mapping, Informing Engineering University, Zhengzhou 450000,China)
The traditional photogrammetry adopts the wide baselines scheme for higher height accuracy under the limit of the given image resolution, to get the reliable 3D terrain information with high precision. The small baseline photogrammetry can also get the reliable 3D terrain information under the limit of the image acquisition system calibrated rigorously and high matching precision. A mathematical analysis is made to discuss the feasibility of reconstructing the height information using the small baseline stereoscopic pairs. The experiments on stereoscopic pairs with different base-height ratio show that the small baseline stereoscopic pairs can reconstructing the reliable height information with high precision in the area with distinctive features.
small baseline; normalized cross correlation; matching accuracy; parallax
2013-06-23
国家863计划重点项目(2012AA12A302-5)
申二华(1988-),男,博士研究生.
TP391
:A
:1006-7949(2014)10-0045-05
