三维激光扫描技术在船体型线测量中的应用
2014-08-16林伟恩谢刚生谢辉荣
林伟恩,谢刚生,谢辉荣
(华南农业大学 信息学院,广东 广州 510642)
一、引 言
船体型线是描述船体形状和尺寸大小的主要要素,是计算船舶航海性能、确定其他船舶内部构件及船体放样的主要依据[1]。在船体改造项目中,船体型线测量是项目精度控制管理中的一项重要内容,为船体改造过程中的设备安装、结构件改造、船体形位监测等提供精确的尺寸依据,直接影响船体建造的质量。因此,准确、高效地获取船体型线具有重要的现实意义。
传统船体型线测量主要使用卷尺、角尺、吊锤、水平软管等工具,但是存在测量工作量大、精度低等缺陷[2-3]。在船体改造项目中,传统型线测量的工程量大而且精度较低,导致结构件误差较大,耗材严重并且延误施工周期。随着电磁波技术的发展,船体型线测量引入了全站仪测量技术,有效地提高了型线测量精度,但是其单点采集方法不能快速获取船体表面几何特征信息,测量工作量仍然较大[4]。通过有限离散点难以准确表达局部形态复杂的曲面。因此,需要进一步提高船体型线测量效率和数据完整性。
三维激光扫描技术是一种利用激光测距原理的新型空间数据采集手段,能够自动快速获取被测对象表面密集的三维坐标、反射值和纹理信息,形成三维点云数据,因此,能够准确描述被测对象的三维空间位置、形态和尺寸信息并快速重构建其三维模型[5]。相对于传统测量模式,三维激光扫描技术具有高采样率、高精度、高密度、工作周期短等优势,通过海量的点云数据准确表达被测对象的空间几何特征,可以有效解决传统船体型线测量中的难题[6]。
二、传统型线测量技术
1. 型线的定义
船体表面是一个复杂的空间曲面,如果用工程制图中的三视图表达方法,只能表示船体最大轮廓线,不能准确地表达船体的真实形状和大小。采用3个相互垂直的平面与船体相交,将交线投影到3个相互垂直的视图上,构成船体型线图。船体型线主要包括横剖线、纵剖线和水线,分别反映船体形状沿船长方向、船宽方向和船深方向的变化情况[7]。通过3个方向的型线,能够准确、完整地表达船体空间立体形状。
2. 型线测量的要求
在船体改造项目中,型线测量要求主要有以下3点:① 高精度,精度在型线测量过程中占有首要位置,较大的测量误差对后期船舶施工产生严重影响。实践证明,型线测量误差极易造成材料浪费、施工周期延误等问题。② 数字化测量,减少人工干预,自动化实现数据采集、记录、处理、存储和成果输出。一方面可以降低人为操作引起的误差,另一方面有利于与现代造船设计软件及相关数据处理软件融合,便于数据后期的管理和使用。③ 高效率,低工作强度。型线测量一般需要耗费大量的人员和测量设备,从外业测量到内业成图周期较长。此外,船坞资源有限,作业周期过长容易引起经济成本提高和影响其他项目的推进。
3. 传统船体型线测量方法
传统型线测量方法首先根据型线测量需求和施工现场情况,科学合理地构建控制网格。然后根据船体自身轴线和水平基准,利用高精度全站仪测量控制网格,建立船体坐标系。在船体坐标系下,根据船体型线测量的需求,利用全站仪采集船体曲面数据,获取型线上离散点的三维坐标值。最后,将原始数据导入专业的数据处理软件中,依次生成船体型线,并对横剖线、纵剖线和水线进行光顺检验和修改。
三、三维激光扫描技术解决方案
1. 三维激光扫描仪的工作原理
三维激光扫描仪从工作原理上分为两类:脉冲式和相位式。脉冲式三维激光扫描仪的工作原理是:激光二极管在脉冲发射器的触发下,周期性地对外发射激光脉冲;然后由探测器接收激光反射信号,并通过精密时钟获取发射和接收信号间的时间差,根据式(1)可获得扫描仪与被测对象间的距离[8]
(1)
式中,s表示测量距离;c表示光速;t表示激光脉冲往返时间差。
而相位式三维激光扫描仪的工作原理则是通过相位差的方法,间接计算激光发射与接收相距的时间,根据式(2)可求得对应的测量距离
(2)
式中,s表示测量距离;c表示光速;φ表示相位差;f表示频率。
三维激光扫描仪一般采用仪器坐标系,以激光发射点为坐标原点,在横向扫描面内建立相互垂直的X轴和Y轴,Z轴与横向扫描面垂直,构成右手坐标系。在扫描过程中,三维扫描仪根据偏转镜同步记录每束激光的横向扫描角度α和纵向扫描角度β,由此获得被测对象表面点的三维坐标(x,y,z)[9]
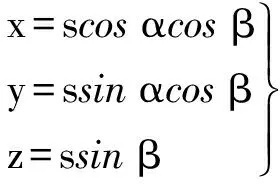
(3)
2. 三维激光扫描技术在船体型线测量中的技术流程
根据船体型线测量的特点和要求,结合三维激光扫描技术作业规程,本文提出了三维激光扫描技术在船体型线测量中的技术流程,并在实际项目中加以试验研究。技术流程主要有5点:
1) 确定扫描路线,布置扫描标靶。在三维激光扫描仪有效测程内,扫描标靶应均匀分布在每一测站的扫描区域,合理布置标靶能够有效控制后期数据处理精度。
2) 架设三维激光扫描仪,全面完整地采集船体表面点云数据。由于施工周期短,进坞成本大,难以进行二次补测。因此,在测量项目的推进过程中,需要确保扫描数据的完整性和有效性。
3) 构建控制网,测量扫描标靶坐标值。船体型线测量要求所有型线成果以船体坐标系为基准,而三维激光扫描仪获取的点云数据是基于仪器坐标系。因此,需要构建控制网,建立船体坐标系,联测标靶坐标值。
4) 点云数据的预处理。在点云数据预处理中,可以删除船坞内施工人员、车辆和建筑物等非测量要素,同时将点云数据三维坐标值转换到船体坐标系下。
5) 点云数据建模并提取船体型线。将点云数据导入三维建模软件中,生成船体模型,利用软件工具提取船体型线。在建模过程中,由于个别噪点引起的不光顺现象,需要严格按照《中国造船质量标准》等相关国家标准、行业标准慎重处理。
三维激光扫描技术能够在复杂的空间环境下进行自动化的数据采集工作,完整获取各种复杂、不规则实体对象的三维空间信息。利用点云数据可以快速重构实体对象的三维模型,获取实体对象的点、线、面等几何特征信息。同时,利用辅助软件可以对三维点云数据进行各种分析处理。点云数据和成果模型可以进行标准数据格式转换,与其他工程软件平台相互兼容,有利于后期数据的进一步管理和使用[10]。因此,三维激光扫描技术在船体型线测量中具有一定的可行性。
四、案例实施
1. 项目需求
本项目需要对一艘长300余米,宽60余米,高30余米的轮船体左舷型线测量,并按行业标准绘制型线图。为了在施工过程中各项改造工作能够高效顺利进行,避免施工周期延误,减少船坞占用时间,本项目采用三维激光扫描技术进行船体型线测量。
2. 项目实施和数据处理
项目使用Faro扫描仪获取船体点云数据,使用徕卡全站仪测量标靶坐标,利用三维建模软件Geomagic对点云数据建模并提取船体型线。具体步骤如下:
1) 确定扫描路线,合理布置扫描标靶,确保每测站能够扫描4~5张标靶,按规划路线完成船体左舷扫描。在船首和船尾部,船体表面几何特征变化较大,相邻测站间距离相对缩短,以保证数据的有效性。
2) 建立控制网,利用全站仪测量标靶三维坐标值。通过坐标转换方法,得到基于船体坐标系下标靶的三维坐标值。
3) 利用Faro自带后处理软件Scene对点云数据进行初步预处理。首先,在软件Scene中,将点云数据导入并保存。在平面视图模式下,标记扫描标靶的位置并删除噪点和冗余物体,以便数据坐标转换和降低数据冗余量,加快数据处理速度(如图1和图2所示)。然后导入标靶坐标值,对点云数据进行坐标转换。由此,可将所有扫描获取得到的点云数据坐标值从仪器坐标系转换为船体坐标系。最后,将预处理完成的点云数据导出为XYZ格式,以便下一步的建模工作。

图1 船体原始点云数据
图2 船体去噪后点云数据
4) 将点云数据按一定的规则分成若干组,分批导入Geomagic软件中,可以加快建模速度。按照三维建模的一般操作流程对点云数据进行二次去噪、合并、封装等处理,最终得到船体左舷的三维模型(如图3所示)。
5) 利用Geomagic软件中截面创建工具,根据横剖线、纵剖线和水线剖切的定义选择剖切平面。然后按照型线绘制要求,确定平面剖切的位置。最后得到相应的船体截线(如图4和图5所示)。如果存在连续多条截线间距相同的情况,可以设置多重截面数和间距大小,快速生成多条截线。
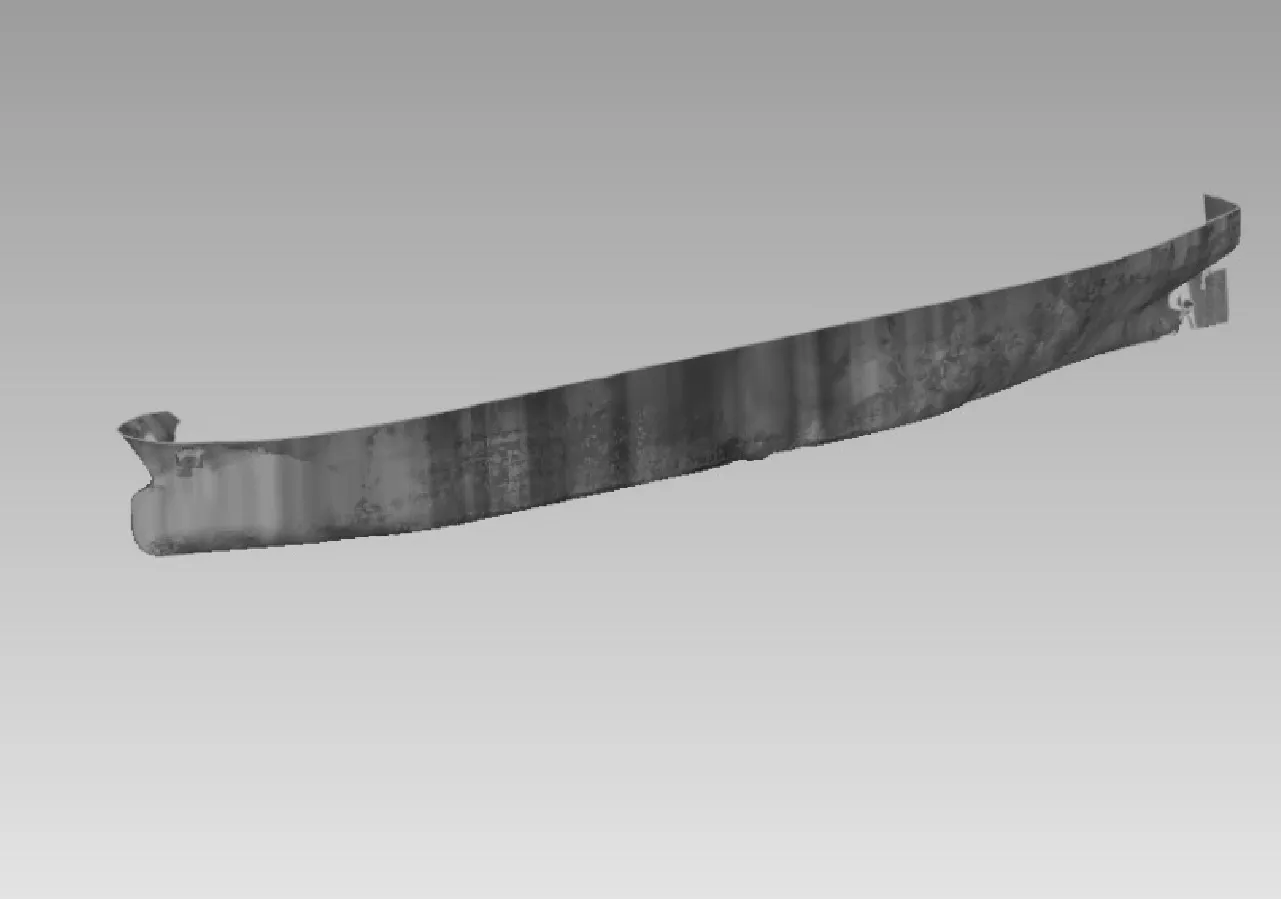
图3 船体模型
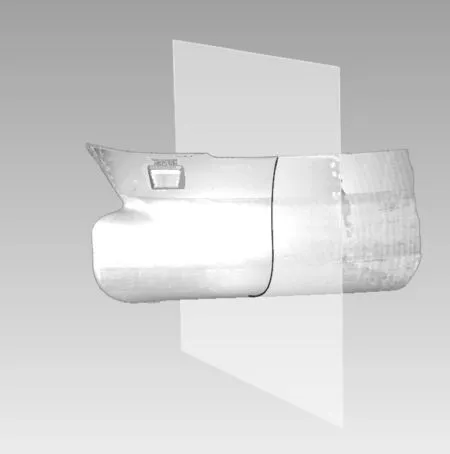
图4 船体单条横剖线
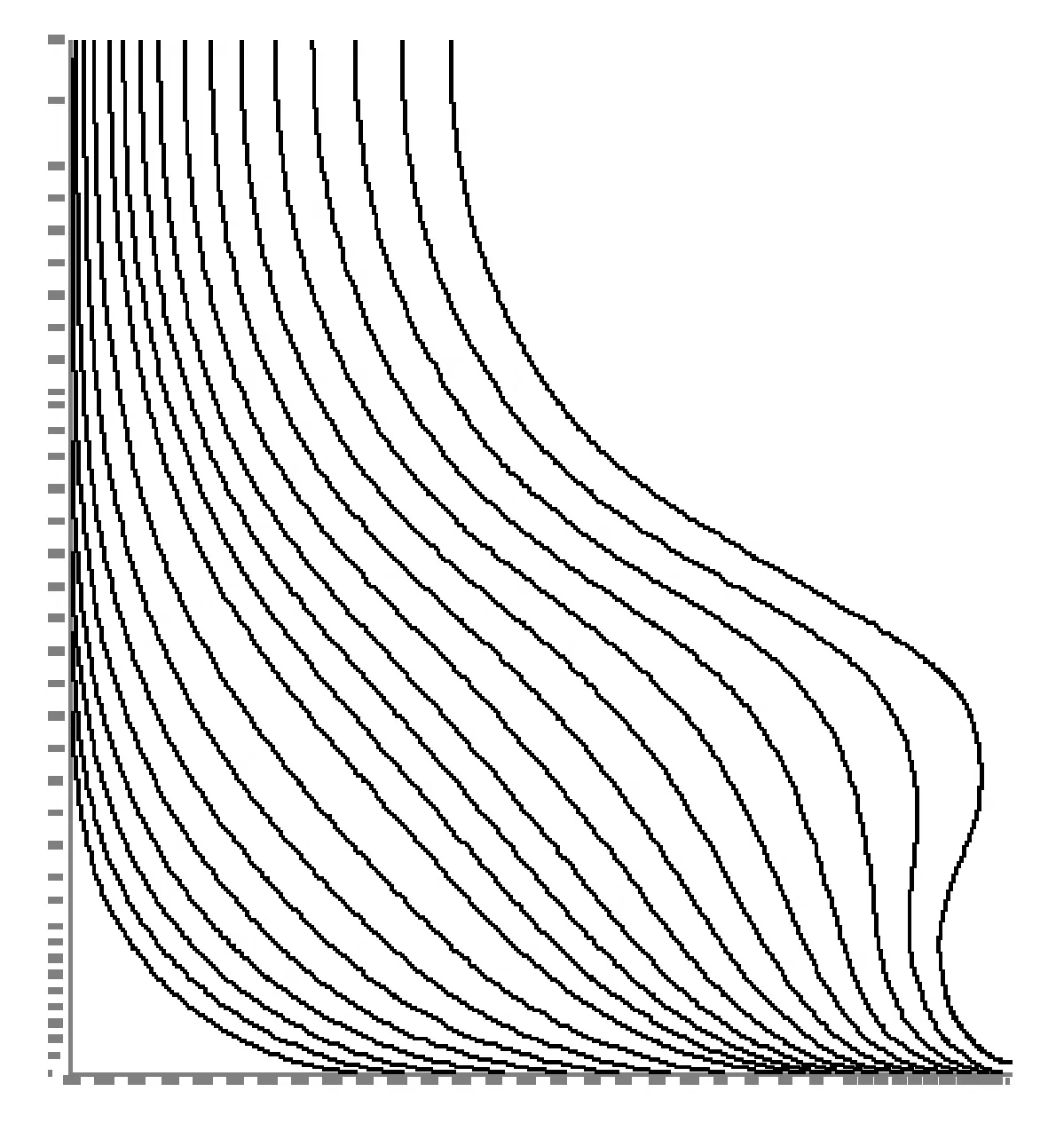
图5 船体局部横剖线型图
3. 成果分析
利用三维激光扫描技术在一周内完成了该艘轮船左舷的数据采集和型线图绘制(约200余条型线)。据船方技术人员评估,若按传统模式测绘,整体工期需1个月左右。现与传统测量模式相比,明显减少了人员和设备的需求量,缩短了施工周期,保证了项目推进的时间节点。
为了验证三维激光扫描技术在船体型线测量中的有效性,本文利用全站仪检验测量其中一条船体横剖线a,在三维模型对应位置提取一条横剖线b,如图6所示。假设全站仪测量得到的横剖线a为理论真值,横剖线b为待检验线。将横剖线a、b导入AutoCAD软件中进行对比分析,试验表明横剖线a、b存在部分区域大致重叠,局部区域出现分离现象,两横剖线最大距离处为9.6 mm(如图7所示),表明三维激光扫描技术能够满足船体型线的测量要求。
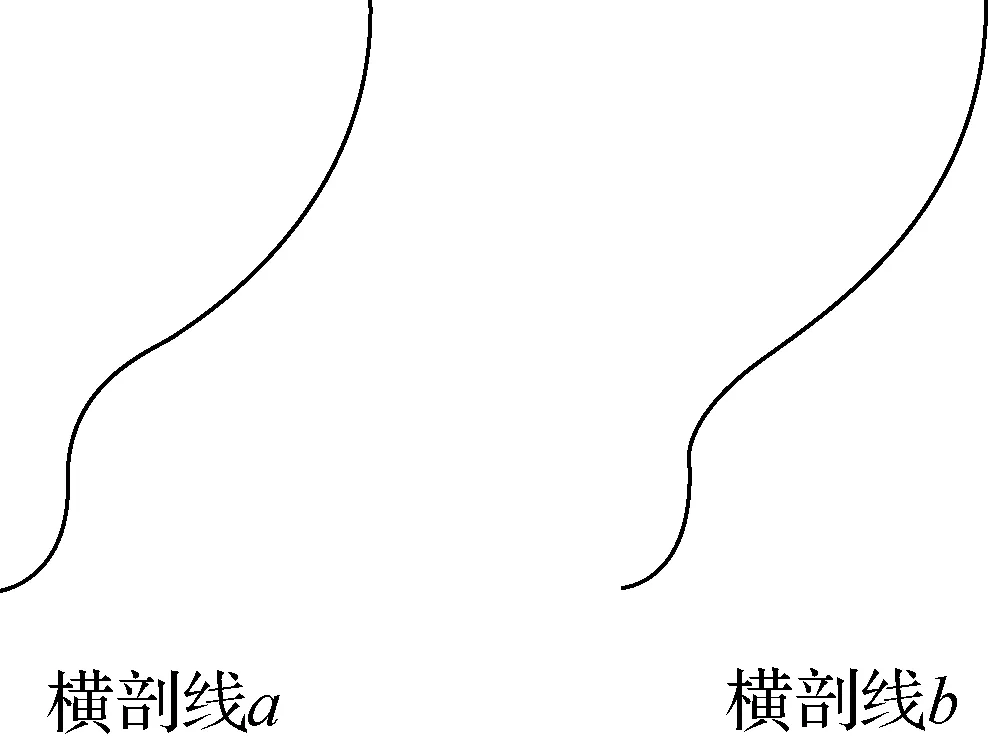
图6
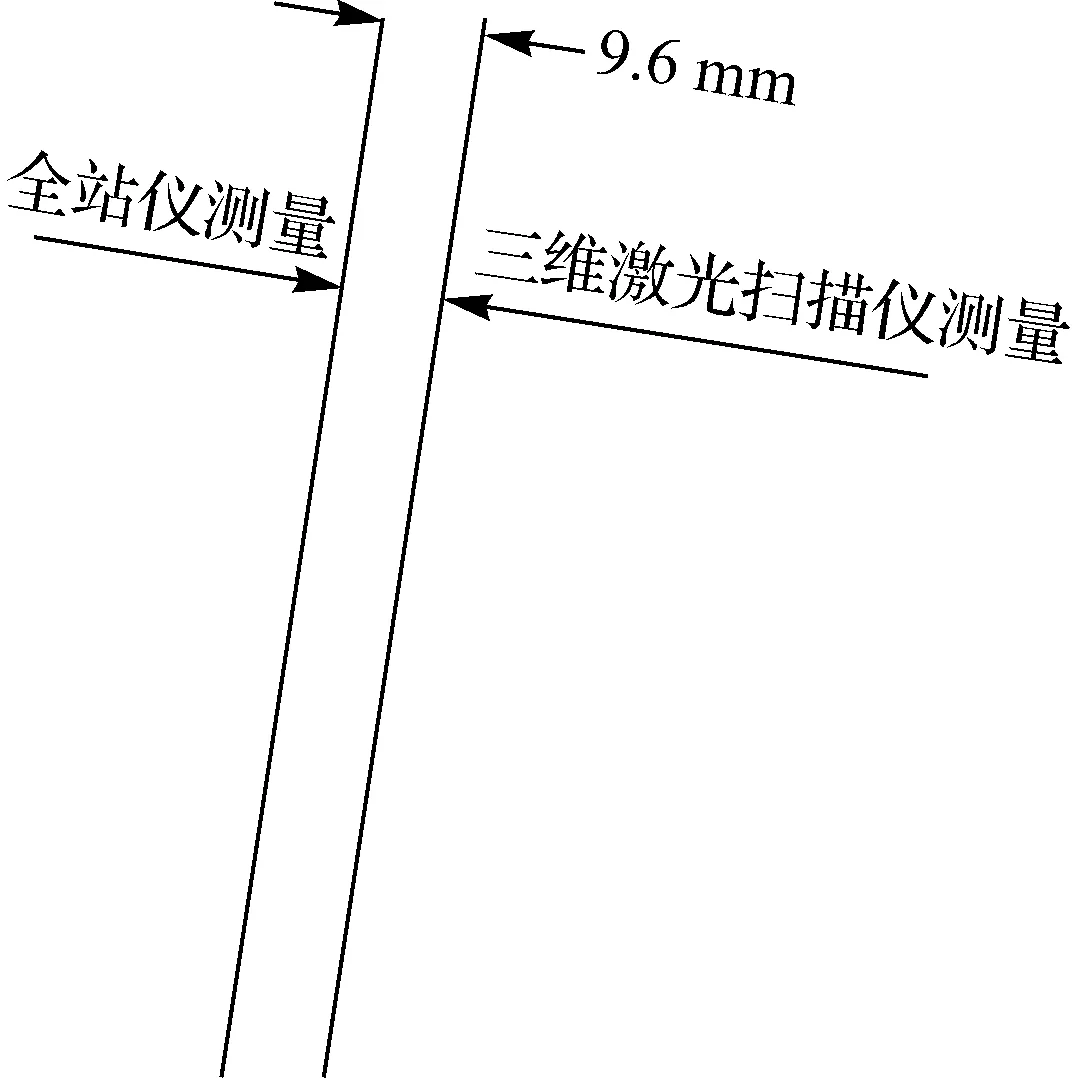
图7 横剖线a、b对比分析
五、结束语
三维激光扫描技术在船体型线测量中具有高采样率、高精度、高密度、工作周期短等优势,能有效克服传统测量中工作强度大、工作效率低等难点。在船体曲面较为复杂的区域,通过海量的点云数据能够准确完整记录其空间几何特征信息,解决了单点采集方法应用有限离散点拟合曲线的不足。利用三维模型提取船体型线,降低了数据处理难度,提高了型线图绘制效率。通过案例实施表明三维激光扫描技术能够满足船体型线测量的基本要求,技术流程具有可行性。三维激光扫描技术在船体型线测量中的推广,具有一定的现实意义和应用价值。
参考文献:
[1] 胡今鸿.基于特征设计法的船体型线设计研究[D].哈尔滨:哈尔滨工程大学,2005.
[2] 黄若波,张杰.基于全站仪和船舶3D设计系统的三维精度测量技术研究[J].造船技术,2011(4):14-16.
[3] 胡学明.实船船体型线的测绘方法[J].船海工程,2008, 37(4):5-7.
[4] 彭维吉,李孝雁,黄飒.基于地面三维激光扫描技术的快速地形图测绘[J].测绘通报,2013(3):70-72.
[5] 罗建,孙德鸿,蒋涛.三维激光扫描在自升式钻井平台桩腿变形测量中的应用[J].测绘通报,2013(5):50-53.
[6] 高志国.地面三维激光扫描数据处理及建模研究[D].西安:长安大学,2010.
[7] 建川.船体型线图[J].现代舰船,1994(6):41-43.
[8] 党晓斌.三维激光扫描技术在建筑物形变监测中的应用研究[D].西安:长安大学,2011.
[9] 梅文胜,周燕芳,周俊.基于地面三维激光扫描的精细地形测绘[J].测绘通报,2010(1):53-56.
[10] 马立广.地面三维激光扫描测量技术研究[D].武汉:武汉大学,2005.
