碾压混凝土坝平层铺筑仓面施工模拟
2014-08-16,
,
(大连理工大学 工程学部,辽宁 大连 116023)
1 研究背景
将模拟应用于混凝土坝施工中,能够适应大数据量的复杂仿真,易于通过参数变更和方案修改来进行动态过程研究,从而缩短了施工方案的制定时间,提高了施工方案和机械配套方案定量指标的精度,对工程方案的设计与优化起到一定的指导作用[1]。这些优点使得施工模拟越来越多地应用于实际工程中,如二滩、沙牌、向家坝、龙滩、龙开口、金安桥、小湾等混凝土坝[2-8],都采用了模拟的方法对施工方案和工期进行了研究。目前大部分的模拟是在假定混凝土的拌和与运输是工期的主要控制因素,且仓面施工不控制施工进度的前提下建立的,主要由混凝土运输机械和选择策略组成的循环浇筑模拟系统;还有部分模拟是在假定作业空间对施工进度无影响的前提下将部分混凝土仓面施工工序纳入混凝土浇筑模型中[9-10]。可以看出,目前考虑仓面施工的模拟不多,考虑作业空间对施工机械的影响以及在有限的作业空间内的机械施工的研究有待增加。考察碾压混凝土坝的施工过程,在坝体中下部仓面的面积较大时,拌和与运输是控制施工进度的主要因素;当坝体施工至上部时,仓面面积小,机械工作面有限,仓面施工成为控制施工进度的主要因素。单独考察一个仓面的施工时,在施工开始和结束时,有支模板、绑扎钢筋、清洗工作面、工人换班、机械保养、入仓口处理等众多因素影响,浇筑进度主要是由仓面施工控制;其他阶段的浇筑进度则主要由拌和与运输控制,因此将仓面施工过程纳入模拟中更能反映真实的施工状态。在仿真方法不断发展的过程中,人们一直在设法找到能使问题空间和求解空间在结构上尽可能保持一致的方法[11],当使用面向对象方法建立模型时,更是尽可能使仿真模型中建立的对象及其联系与客观世界的保持一致,通过若干简单对象及其属性来准确描述现实过程。然而对于影响模拟结果的关键对象及过程的简化将降低模型的可信度,所以忽略或过于简化仓面施工工艺过程,忽略仓面作业空间对整体施工效率的影响的模型并不能适用于碾压混凝土坝施工的各个阶段。考虑到平层施工在碾压混凝土坝仓面施工中的普遍应用,本文拟通过对平层仓面施工工艺的过程模拟,更加真实地反映碾压混凝土坝的浇筑过程。
2 碾压混凝土平层铺筑仓面施工工艺
平层铺筑法是指在碾压混凝土仓面分层施工时,铺筑层面为水平面,待下一层铺筑完成之后,再进行上一层铺筑的方法。在碾压混凝土坝仓面施工中,施工条件允许的前提下,平层法一般是首选方案。
2.1 运输入仓
碾压混凝土的运输方式主要有自卸汽车直接入仓、专用皮带机入仓和负压溜槽(满管溜筒)运输入仓等,其中自卸汽车直接入仓是最常用的方式。采用自卸汽车将混凝土运输入仓时,为了防止仓面污染,入仓之前必须冲洗轮胎,仓面内自卸汽车控制时速为10 km/h以下,并禁止转急弯、急刹车的操作[12]。自卸汽车在仓面卸料时应采用合理的卸料方式,卸料位置应位于条带的已摊铺完成的摊铺前沿上,这样可以通过摊铺作业处理运输造成的骨料分离。也就是说,自卸汽车在仓面中的行进路线和卸料点是按计划、有规律的,并非杂乱无章的。并且由于汽车应尽量在摊铺前沿上进行卸料,当其他机械占用这一空间时,自卸汽车的有效卸料面积就会减少,即汽车到达仓面时不一定能及时卸料,在等待卸料的时间并不固定,由实际施工情况决定。因此,自卸汽车在仓面的运输效率受仓面空间和机械作业面的影响比较大,在模拟时应予以考虑。
2.2 平仓振捣
混凝土坝仓面的浇筑是依照仓面施工计划(也被称为仓面要领图)进行施工的。自卸汽车卸料完成之后,由平仓机沿条带摊铺混凝土,平仓机一般采用工作运行速度较高的湿地推土机,并根据仓面大小选择合适的机型。摊铺时的层厚一般为34 cm,注意防止骨料分离,并严格控制上下层浇筑的间隔时间。在摊铺机械工作的区域内,自卸汽车不能卸料,其他机械也应当避让;当摊铺完成之后,自卸汽车才能在新形成的摊铺前沿卸料。
当完成摊铺的面积能满足碾压机械的工作面要求时,应及时开始碾压,缩短从拌和到碾压完毕的时间。碾压机械的工作应尽量不影响混凝土的卸料和摊铺,条带从拌和到碾压完成的时间宜控制在2 h以内。由于碾压机械在有足够的工作面时才能进行施工,其工作的优先程序低,且几乎不占用其他机械的工作面,对卸位的设置没有影响,所以在本模型中,假设碾压机械对整体施工影响不大,仓面内部模型主要是运输、卸料与摊铺事件构成的机械空间位移模型,不建立碾压机械工作模型。
2.3 变态混凝土和施工缝处理
碾压混凝土坝的特点之一就是层面、缝面多。水平施工缝是上下浇筑层之间施工停顿形成的缝面;横缝是指垂直坝轴线的分缝,可采用机械切缝或止水部位预先架立隔缝材料等方式形成。在碾压混凝土仓面中,仓面四周常需要进行变态混凝土的施工,即在已经铺筑的碾压混凝土上铺撒入一定量的胶凝材料浆体,然后用振捣器振捣密实。变态混凝土可以代替仓面的常态混凝土,其优点是与碾压混凝土的结合良好。这一过程可与混凝土的浇筑同时进行,但应尽量不影响摊铺、碾压等施工工序。由于切缝时对是否已经碾压完毕没有要求,本模型中未将该工序纳入模拟内容中。
3 模拟软件及方法
目前的混凝土坝施工模拟主要是采用C++,Visual Basic等高级程序设计语言编程[13],这样建立的模型结构化强,用于复杂系统建模时工作量大。现在也有采用VC++等面向对象的语言来建立的模型,操作性强,可用于可视化建模。然而仓面施工模拟要解决的主要问题是机械在空间上的占位、运动及相互干扰等问题,核心的内容在于机械空间运动模型的建立,目前的施工模拟研究所采用的编程(建模)方法,工作量庞大,对于结果的可视化输出处理效果不佳。仿真软件对于空间上的运动仿真和实时输出有很好的处理能力,适合用于解决仓面施工模拟的主要问题。通过对市面上应用较多的软件进行比较,选用了Anylogic仿真软件,它支持离散系统、连续系统和混合系统的建模,本文所建立的碾压混凝土坝平层铺筑仓面施工模型,就是在AnyLogic的仿真平台下主要利用行人库与自定义的Java类对象一起建立的离散事件模型。
行人库(Pedestrian Library)是Anylogic软件中一个用于仿真“真实”环境中的行人流的标准库,允许用户采用流程图的方式来建立模型,也可以通过用Connecter连接对象来建立模型结构。其创建的主动对象能在连续空间中运动,或执行特定的操作,同时对周围的障碍物和其他行人做出反应,这一特点十分适用于笔者将要进行的仓面模拟。所以本文将这一特点引入至机械的运动中,加以限制和改进,形成了原始的机械运动模型。
4 模型建立
碾压混凝土坝施工的主要内容是拌和、运输和仓面施工。通过对以往混凝土坝施工模拟的研究,本文在拌和与运输的基础上增加了对仓面施工工艺的模拟,并对各种机械的工作模式进行了改进,添加了空间占位和道路避让等特点。本文中的碾压混凝土坝平层铺筑仓面施工模型是基于条带浇筑模型、机械工作模型和运输入仓模型建立的,基本框架如图1所示。

图1 碾压混凝土坝仓面施工模拟框架
4.1 条带浇筑模型
碾压混凝土坝平层施工的仓面按照其形状可大致分别矩形仓面、回字形仓面、工字形仓面和不规则仓面。其中大部分仓面是矩形仓面,其次是回字形仓面。以江垭大坝为例,除部分小型沟槽回填仓面和廊道出口回填仓面外,矩形仓面占到了将近60%,矩形和回字形仓面占到了80%以上。所以在本模型中,选用简单矩形仓面进行模拟,可以通过调整仓面面积,分析仓面大小对于机械施工效率的影响。在仓面施工中,施工方向和施工顺序由条带的布置方向和位置来决定,一般的条带布置方向是平行于坝轴线布置。条带宽度d的取值范围由施工机械宽度、仓面大小、卸料宽度和高应力区域大小等因素控制。
条带浇筑模型相当于机械运动的舞台,是仓面浇筑模型运行的基础,其主要内容有仓面信息处理、条带布置、卸位布置和摊铺方向等。卸料的卸位应尽量布置在摊铺前沿上,在刚开始浇筑时,应从第一条带靠近入仓口的位置开始卸料,第一条带的摊铺,应优先形成可以供推土机工作的工作面,即形成以条带宽度为浇筑宽度、浇筑长度不断增加的条带浇筑模式。所以卸料位置沿条带宽度方向布置,摊铺方向沿条带长度方向进行。当有已经完成摊铺的条带之后,推土机可在已完成摊铺的条带上工作,有足够的工作面,条带浇筑模式应以减少仓面内部机械(以自卸汽车为主)等待时间为主,卸料位置可沿条带的长度方向布置,增加卸位数量,摊铺方向垂直于条带的长度方向。
4.2 机械工作模型
机械运动模型框架是基于行人库模型建立的,并通过JAVA语言编程进行属性和结构的扩充。仓面机械工作的主要特点是机械的工作面十分有限,工作面上没有统一的道路,没有固定的等待或排队地点,这使得机械在仓面内的运动灵活,工作时间和路径随机性大。同时,机械在仓面内的运动还有一定的约束,并不是完全随机的。传统的机械运输模型多是以时间分布作为其运输模型的基础,难以真实地反映当多种机械在同一工作面上工作时机械间的相互影响。而本模型中的机械运动模型能较为真实地反映出机械在有限的工作面上干扰、配合,这是其区别于其他模型的核心特点。
(1) 基本模型参数。模型参数主要包括机械种类、大小、运行速度、施工效率、工作模式、工作时长、工作状态、优先级等,大部分的参数可以直接利用软件设置,还有一些需要通过建立Java类或由前置参数来决定来实现,图2是Loader类(装载机)的一些基本参数的设定,和Java编程定义的部分Truck类的基本参数,还有一些数据只能通过模拟本身获取。

图2 基本参数设置
(2) 工作面与空间避让。在等待与排队的过程中,每个机械占有与其自身大小有关的空间,且从等待点至目标点的距离不是固定值,这样,与单纯的概率分布相比,更能真实地反映等待的过程。机械在仓面工作时,不指定具体的道路,仅指定目标区域,由机械按一定规则选择合适的最短路径,并在运动过程中按其优先级主动避让附近的其他机械,避免机械碰撞的产生。在仓面施工时,机械也并不是任何时候或任何区域都能进行工作,同一机械在某一时间点只能完成一项工作,单个机械的工作面,不能被其他机械占用,当机械在确认工作状态及目标工作面后,机械才能确实运行至需要工作的区域施工。
(3) 工作范围与边界调整。装载机和推土机摊铺砂浆和碾压混凝土时,每次的工作范围都在不断变动,需要用以下公式计算:

4.3 运输入仓模型
相比其他混凝土运输方案,采用自卸式汽车运输混凝土,机动灵活,准备工作简单,适应性强,这使其广泛应用于混凝土坝运输方案中。所以本文采用常用的自卸式汽车运输方案,即混凝土的运输是由自卸汽车从拌和楼运输至仓面的卸位处,卸料完成之后,空车返回至拌和楼装料。模型框架中的一大特点是自卸汽车在运输过程主动自行避让其他机械,特别是在进入仓面卸料的阶段,自卸汽车需要与仓面施工机械相互协调,确认行进路线。模型中建立的主动对象是独立于其他对象的,当其他同一类型的对象进入设定的范围内时,该对象会主动调整路线,避免碰撞的产生。本模型是通过仓面浇筑模型与拌和系统的通信,实时确定拌和楼的拌料种类和方量,这使得拌和楼的拌和时间、清料换料时间会直接影响汽车在拌和楼前的排队时长和服务时间。
5 工程应用及分析
5.1 仓面基本信息
在本模型中,对3个面积分别为5 000,3 000,1 500 m2的仓面进行模拟,仓面形状均为矩形,设1个入仓口,在最后一层进行封仓。1号仓面由2个坝段组成,沿坝轴线方向宽度为55 m,垂直于坝轴线方向长度为114 m;2号仓面由1个坝段组成,沿坝轴线方向宽度为36 m,垂直于坝轴线方向长度为114 m;3号仓面由一个坝段组成,沿坝轴线方向宽度为36 m,垂直于坝轴线方向长度为40 m。1号和2号仓面的条带宽度的取值范围8~25 m,共7个条带,其中第7条带每层混凝土之间需铺筑灰浆;3号仓面的条带宽度均为8 m,共5个条带,无高应力区。在建立的模型中只需要改变初始的条带宽度,模型即可自行布置条带。运输机械为10台每次运输方量为6 m3的自卸汽车,配有2台铭牌拌和量为360 m3/h的拌和楼,入仓道路仅有1条,连接拌和楼与入仓口,当仓内卸料区域不足时,汽车在入仓口外等待。仓内配有1台装载机和2台推土机,分别用于摊铺灰浆和混凝土,1号、2号及3号仓面分别配4台、3台和2台振动碾,用于混凝土的碾压。仓面四周变态混凝土的宽度为0.2 m,人工铺灰浆,并配3台100 mm手持插入式振捣器。另外,1号仓面的坝段1与坝段2间需作切缝、灌砂处理,配1台切缝机。图3是1号仓面施工条带和入仓口的布置图。

图3 1号仓面施工条带布置图
5.2 模拟结果
对不同仓面的碾压混凝土坝平层铺筑施工的模拟,其模拟结果如图4和图5所示。仓面主要机械的利用率如表1所示。
从模拟结果来看,3个仓面的施工进度的共同特点是开始与结束时浇筑强度低。这是由于仓面施工刚开始时,层间需要铺灰浆,且浇筑是沿坝轴线方向进行,用于卸料的摊铺前沿短,制约了混凝土的浇筑;施工接近尾声时,卸位数量逐渐减少,且需要封仓,浇筑进度缓慢。对于1号和2号仓面,浇筑中期,碾压混凝土浇筑强度呈现有规律的波动,浇筑高峰出现在第一条带浇筑完成之后,原因是浇筑方向变为垂直于坝轴线方向,摊铺前沿显著增长,且受第一条带施工效率低的影响,仓面处等待卸料的汽车多,所以在仓面空间作业面允许时,浇筑强度大幅提升。浇筑的低谷发生于层间灰浆铺筑时,碾压混凝土的浇筑需待灰浆摊铺完成后才能进行,此时浇筑强度较低。在浇筑中期,3号仓面碾压混凝土浇筑强度波动大,峰值出现无规律,这是由于仓面面积小,控制施工进度的主要因素是仓面施工,随机性大;但仍可看出最后一个条带浇筑进度较慢,其原因是卸料区域有限。本文模拟产生的浇筑强度曲线呈现的以上特点与工程实际中的浇筑强度特性较为相符,是不考虑仓面作业和空间约束的模拟所不能反映出来的。

(a) 1号仓面

(b) 2号仓面

(c) 3号仓面
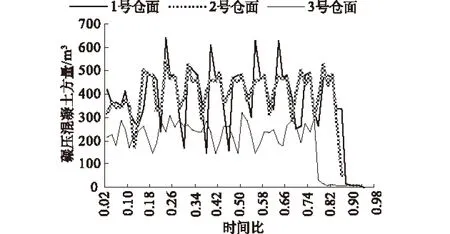
图5 仓面施工强度对比图
表1仓面机械利用率对比表
Table1Comparisonsofmachines’utilizationrateinplacementsurfaces

仓面拌和楼实际效率汽车利用率推土机利用率1号373.60.760.512号372.170.780.503号196.810.250.34
6 结 语
本文对混凝土坝运输过程进行了模拟,涉及了大坝运输和仓面施工的主要机械,主要模拟和分析了在不同仓面下,碾压混凝土坝平层浇筑仓面施工的情况,当仓面面积小于一定程度时,施工进度由仓面内部施工控制。通过对同一仓面的模拟结果的分析,在一个仓面内施工进度也并不是一直由运输系统控制,在开始、结束和高应力区施工时,由仓面内部众多施工因素控制,例如在仓面施工开始和结束时,卸位数量受限、层间砂浆铺筑及封仓等。本文是在假设碾压机械对施工效率几乎没影响的前提下建立的仓面平层法施工模型,这是模型有待改进之处。
参考文献:
[1] 钟登华,练继亮,吴康新,等.高混凝土坝施工仿真与实时控制[M].北京:中国水利水电出版社,2008. (ZHONG Deng-hua, LIAN Ji-liang, WU Kang-xin,etal. Construction Simulation and Real-Time Control for High Concrete Dam[M]. Beijing: China Water Power press, 2008.(in Chinese))
[2] 郑家祥, 钟登华, 胡程顺.等, 沙牌拱坝碾压混凝土浇筑中的关键技术研究[J]. 水力发电学报, 2004, (2): 83-87.(ZHENG Jia-xiang , ZHONG Deng-hua, HU Cheng-shun,etal. Study on the Key Techniques of Shapai Roller Compacted Concrete Arch Dam Construction[J]. Journal of Hydroelectric Engineering, 2004, (2): 83-87.(in Chinese))
[3] 李名川. 向家坝水电站大坝浇筑施工方案仿真分析与优化设计[D].天津:天津大学,2005. (LI Ming-chuan. Simulation and Optimization on the Dam Construction Schemes of Xiangjiaba Hydropower Station[D]. Tianjin: Tianjin University,2005.(in Chinese))
[4] 王忠耀. 向家坝水电站二期工程混凝土重力坝施工仿真与实时控制分析研究[D].天津:天津大学,2010.(WANG Zhong-yao. Research on Construction Simulation and Real-time Control Analysis for the Phase II Concrete Gravity Dam of Xiajiaba Hydropower Project[D]. Tianjin: Tianjin University, 2010.(in Chinese))
[5] 林鸿镁. 龙滩水电站大坝碾压混凝土运输方案的研究[J]. 红水河, 1999, (2): 26-32. (LIN Hong-mei. Research for Transport Plan of RCC in Dam of Longtan Hydroelectric Project [J]. Hongshui River, 1999, (2): 26-32.(in Chinese))
[6] 张双双. 龙开口水电站碾压混凝土坝大坝浇筑计算机仿真研究[D].天津:天津大学,2008. (ZHANG Shuang-shuang. Study on Computer Simulation of Longkaikou Roller Compacted Concrete Dam[D]. Tianjin: Tianjin University,2008. (in Chinese))
[7] 吴康新. 金安桥碾压混凝土坝施工动态可视化仿真与优化研究[D].天津:天津大学,2005. (WU Kang-xin. Dynamic Visual Simulation and Optimization for the Construction of Jinanqiao Roller-compacted Dam[D]. Tianjin: Tianjin University,2008. (in Chinese))
[8] 王仁超, 石 英, 李名川, 小湾大坝混凝土浇筑施工仿真研究[J]. 四川大学学报(工程科学版), 2004, (4): 10-14. (WANG Ren-chao, SHI Ying, LI Ming-chuan. Study on the Simulation of Arch Dam Construction in Xiaowan Project [J]. Journal of Sichuan University(Engineering Science Edition), 2004, (4): 10-14.(in Chinese))
[9] 郭 勇, 郑家祥. 高碾压混凝土拱坝施工工艺及模拟仿真研究[J]. 水电站设计, 2003, (3): 1-7.(GUO Yong, ZHENG Jia-xiang. Study on the Construction and Simulation of High Roller Compacted Arch Dam [J]. Design of Hydroelectric Power Station, 2003, (3): 1-7.(in Chinese))
[10] 于雪峰,张以晓. 碾压混凝土坝施工坝面作业系统分析与模拟[J]. 黑龙江水专学报, 1995, (4): 9-12. (YU Xue-feng, ZHANG Yi-xiao. System Analysis and Computer Simulation on the Concrete Placing System of the Roller Concrete Dam Construction [J]. Journal of Engineering of Heilongjiang, 1995, (4): 9-12. (in Chinese))
[11] 冯惠军,冯允成. 面向对象的仿真综述[J]. 系统仿真学报, 1995, (3): 58-64. (FENG Hui-jun, FENG Yun-cheng. A Survey on Object-Oriented Simulation [J]. Journal of System Simulation, 1995, (3): 58-64. (in Chinese))
[12] 杜志达, 马 岚. 江垭大坝RCC施工工艺[J]. 水利水电技术, 1998, (2): 19-22. (DU Zhi-da, MA Lan. Construction Progress of RCC in Jiangya Dam[J]. Water Resources and Hydropower Engineering,1998,(2):19-22. (in Chinese))
[13] 郑家祥, 高碾压混凝土拱坝真三维施工模拟[J]. 水电站设计, 2003, (2): 1-7. (ZHENG Jia-xiang. Three-dimensional Simulation of High Roller Compacted Concrete Arch Dam Construction[J]. Design of Hydroelectric Power Station, 2003, (2): 1-7. (in Chinese))