一种特殊的航线间公共点的提取方法
2014-08-15刘文国
杜 艺,刘文国,葛 帅
(1. 山东省水利勘测设计院,山东 济南 250013; 2. 济南市房产测绘研究院,山东 济南 250001)
一、引 言
特征点提取是图像分析过程中的重要步骤,也是数字摄影测量的关键技术之一。特征点的本质问题可以归结为:在抵抗一定图像畸变的情况下,保证特征点的正确提取和匹配[1]。然而,由于天气、阳光、遮挡及传感器位置变化等因素导致图像发生了各种几何变形和灰度变化,稳定的特征点提取变得困难[2]。因此,提取不受外界干扰的局部不变特征在数字摄影测量中变得尤为重要。
在航空摄影过程中,由于摄影时间及太阳高度角的变化,使得地面物体和有一定高度的地面植被在不同航线上的位置发生变化,而在一般的纹理分析、特征点提取时,这些点很容易被提取出来,这就造成了点位的不精确,降低了空中三角测量的精度。实践证明,要克服摄影时间、太阳高度角、摄影位置等变化因素的影响,必须提取一些特殊的特征点,这是解决全自动空中三角测量的关键。
二、高斯拉普拉斯原理
1. 拉普拉斯原理
假设一个二元图像函数为f(x,y),则其拉普拉斯算子[3]为
为了更适合数字图像处理,式(1)需要表示为离散形式。考虑到有两个变量,在x方向上对二阶偏导数采用下式定义

(2)
类似的,在y方向上为
则式(1)中的二维拉普拉斯数字实现可由两个分量相加得到,即

f(x,y-1)-4f(x,y)]
(4)
为了直观地了解拉普拉斯变换定义,对图像进行拉普拉斯变换运算,效果如图1所示。

图1
2. 高斯拉普拉斯原理
由于直接对图像求二阶导数容易受噪声的干扰,因此常常和高斯平滑滤波器结合使用。首先使用高斯滤波器进行平滑处理,去除噪声的干扰,然后使用拉普拉斯滤波器进行卷积[4],这就是LoG定义的由来。
线性滤波器具有式(5)的性质

(5)
即先用高斯函数对图像卷积,然后对图像求二次偏导数,等同于用一个高斯函数的二阶导数对图像卷积[5]。高斯函数公式如下
LoG算子公式[6]为
图2是对图1(a)进行LoG运算的效果图,其中高斯函数的参数σ(sigma)=2。从图2可见,眼睛处和摄像机前端的LoG响应值最大,而在摄像机镜腿的白色区域LoG响应值最小。

图2 LOG的极大值和极小值
为了更好地看清楚眼睛处的图像和眼睛处的LoG响应的对应关系,截取细节部分将其放大。从图3可见,LoG响应的极值点准确定位Blob特征的中心位置,极大值对应于白色背景中的黑色Blob,极小值对应于黑色背景中的白色Blob。

图3 细节部分的LOG响应
检测的Blob大小尺度是由参数σ来决定的,可以通过不同σ的LoG响应试验作对比。图4为σ分别取值2和10的LoG响应的效果图对比。
图4中σ=2的LoG对眼睛区域响应大,而σ=10的LoG对头部响应大,即不同的σ值对应了不同大小的Blob尺度。通过图5得到,LoG看似像眼睛,它在眼睛处LoG响应最大,可以看成用一个滤波器与图像卷积,相当于在图像中找与这个滤波器模板最相似的部分,也就是模板匹配。
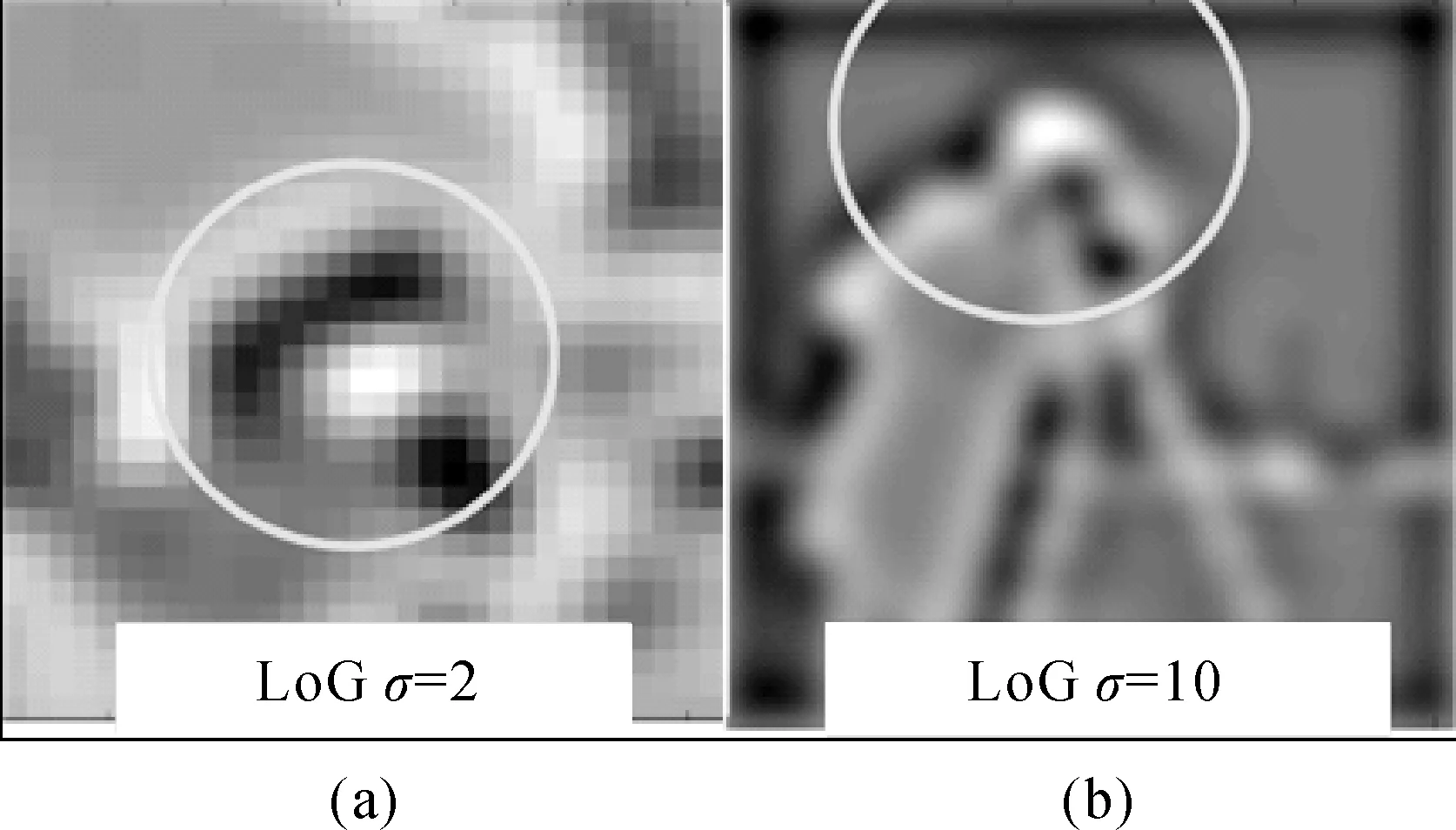
图4 σ取不同值的LoG响应

图5 LoG看似模板进行模板匹配
三、特殊的提取方法
1. 构造二维LoG滤波器
第一步关键是选择σ参数的大小。通过观察Blob特征,确定σ=0.8,size=5大小的滤波器,即
2. 对图像进行LOG 滤波器卷积运算
用构造的LoG滤波器对影像进行卷积运算。图6为裁切的航空影像的部分图像,将要提取的特殊点局部区域放大如右边图像,图7是LoG响应图。

图6 原始图像上提取的特殊点

图7 原始图像的LOG响应图像
从图6和图7可知,需要提取的点刚好符合白色背景中的黑色Blob。在响应图中看到该Blob处响应最大,而极大值的地方就是Blob的中心位置。在程序设计中,不需要归一到0~255,这只是用来验证上述理论。该点附近的相应值情况如图8所示,截取以最大响应处为中心的11×11的窗口。

图8 LOG响应值
从图8可以看出,黑色Blob处的响应值都是正值,相反周围白色背景的响应值为负值。把负值置0,则黑色Blob就凸显出来了。为了方便显示,把阈值分割后的图像进行了归一化操作,得到的图像如图9所示。

图9 LOG响应值的阈值分割及图像显示
3. 极值检测
通过第2节得到阈值分割图像后,为了筛选响应强度大的特征,在LoG响应图像上给定一个阈值,经过多次试验,选取阈值40。如果LoG响应图像的像素大于这个阈值,再将每一个像素与周围邻域8个像素进行比较,以确保二维图像空间检测到局部极值,将该点作为候选点进行下一步处理。
4. 模板框套合运算
以候选点为中心,用一个5×5或7×7的模板框对该点进行套合,如果该模板框不能完全把该候选点连通的区域封闭,则淘汰该候选点。
经过上述4步操作后,已经提取到想要的特殊点,如图10所示。在纹理信息丰富的森林草地地方,往往造成一些伪Blob特征,虽然也符合Blob的定义,但是在航空摄影测量中,这些地方容易受外界因素干扰,是不可靠信息,因此需要排除。通过观察影像数据,可发现这些地方响应大的Blob处,在原始图像上是因为所谓的白色背景太暗。排除这些伪Blob特征干扰的方法是在每个候选点附近,用该点为中心的3×3像素的均值,与外边一圈5×5的窗口外框的像素的均值作差,如果差值>22,就可以排除掉这些伪Blob特征,结果如图11所示。

图10 模板框套合后提取的特殊点

图11 去除伪Blob特征后的特征点
通过观察图11,可以发现还有一部分点没有被排除。通过观察发现,这些伪Blob特征点附近的背景不是单纯的白色或黑色,一边是白色背景,一边是灰色背景,这些点往往是树与树之间的缝隙造成的伪特征。剔除这些伪Blob特征点的方法是:因为需要提取的Blob特征的大小仅仅是3×3范围的,中间黑、四周白的像素块,也就是说,中间点的像素值比周围四条边的像素值的均值要小的多,把该点的原始图像的像素值与外围第三圈像素的每个边的灰度值均值作比较。经过多次试验,这个差值的阈值选取29。图12为提取Blob特征的最终结果。

图12 提取Blob特征的最终结果
图13是对航空影像(城市区域)进行的Blob特征提取,图14是对航空影像(山地区域)进行的Blob特征提取。从图13和图14中可以看出,提取的Blob特征大部分位于地势平坦的区域,往往不受地形起伏的影响,并且它是一个圆形的特征,不会受图像旋转的影响。
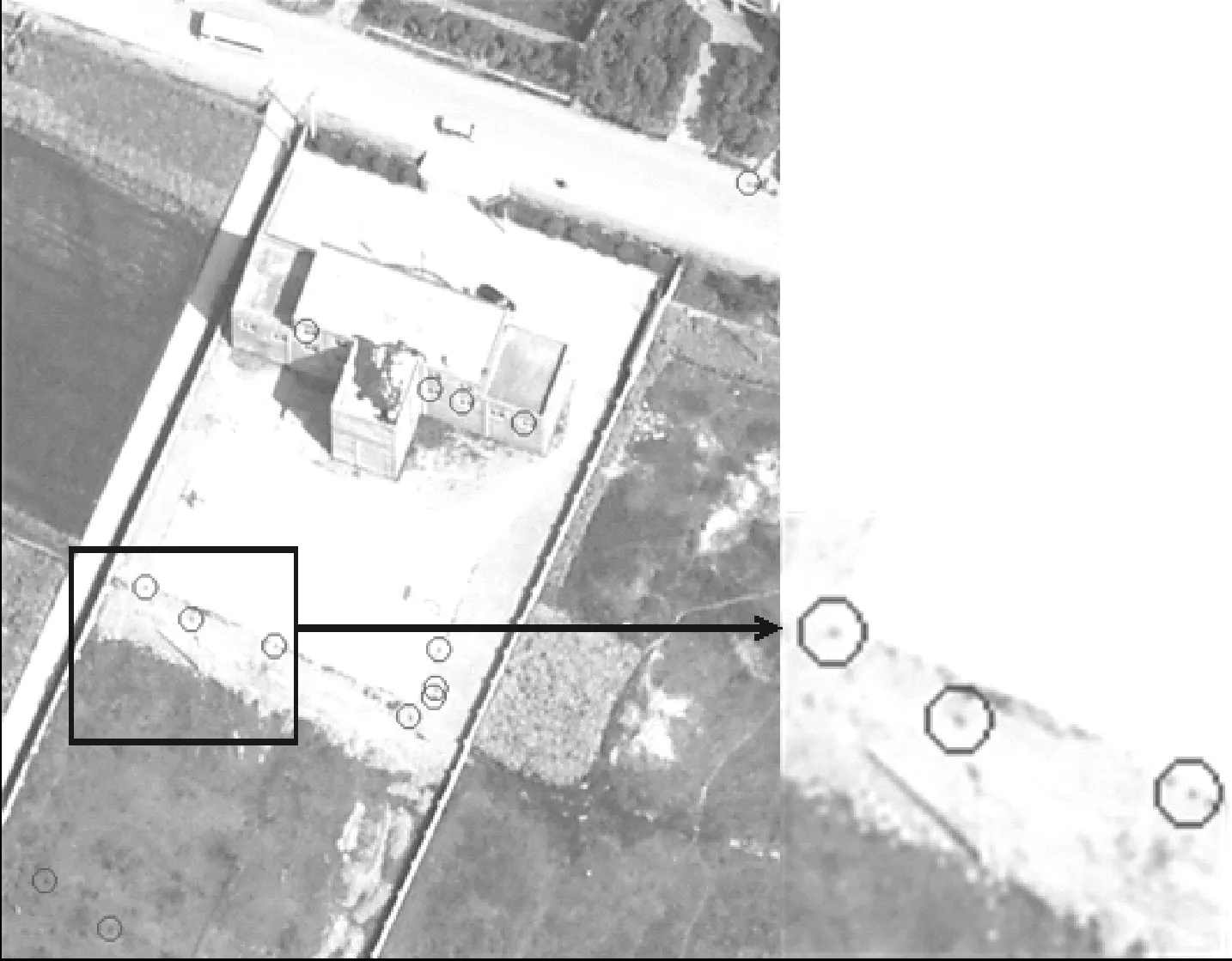
图13 航空影像(城市区域)上提取的特殊点
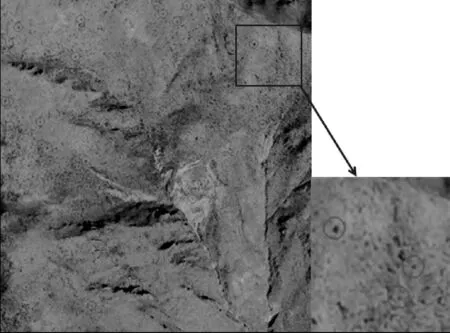
图14 航空影像(山地区域)上提取的特殊点
四、结束语
本文在介绍拉普拉斯原理的理论基础上,重点分析了高斯拉普拉斯原理,结合充分的参数适应性的试验分析,根据空中三角测量中航线公共点的特殊性,提出了一种特殊的Blob特征检测方法,克服了在空中三角测量中摄影时间、太阳高度角、摄影位置等变化因素的影响,解决了全自动空中三角测量中航线间公共点自动提取的关键问题。
参考文献:
[1] LOWE D G.Object Recognition from Local Scale-invariant Features[C]∥Proceedings of the 7th IEEE International Conference on Computer Vision.Washington D.C.:ACM,1999.
[2] LOWE D G.Distinctive Image Features from Scale-invariant Keypoints[J].International Journal of Computer Vision,2004,60(2):91-110.
[3] 冈萨雷斯. 数字图像处理[M]. 北京: 电子工业出版社, 2008: 105-106.
[4] LINDERBERG T. Feature Detection with Automatic Scale Selection[J].International Journal of Computer Vision,1998,30(2):79-116.
[5] LINDERBERG T.Scale-space Theory:A Basic Tool for Analysing Structures at Different Scales[J].Journal of Applied Statistics,1994,21(2):224-270.
[6] SCHMID C,MOHR R,BAUCKHAGE C.Evaluation of Interest Point Detectors[J].International Journal of Computer Vision,2000,37(2):151-172.
