基于交叉验证的捷联惯导制导工具误差分离方法
2014-08-11段秀云
段秀云 黄 瑜
91550部队94分队,大连 116023
基于交叉验证的捷联惯导制导工具误差分离方法
段秀云 黄 瑜
91550部队94分队,大连 116023

在捷联惯导制导工具误差分离过程中引入交叉验证检验制导工具误差分离精度,并基于均方误差准则建立量化检验指标。首先建立简化的制导工具误差分离模型,并将数据划分成训练集和检验集;然后利用训练集进行制导工具误差分离;最后利用检验集和量化检验指标对分离效果进行检验。数学仿真表明,提出的误差分离模型正确可靠,精度较高,交叉验证能够对分离效果进行有效检验。
捷联惯导;制导工具误差分离;交叉验证
捷联惯导系统由于体积小、造价低和性能稳定,越来越得到广泛的应用[1]。随着惯性器件精度和可靠性的进一步提高,捷联惯导系统已经逐步应用于战役和战术导弹。导弹制导精度主要受制导方法误差和制导工具误差影响,其中制导工具误差对制导精度的影响远大于制导方法误差。制导工具误差包括制导工具系统误差和制导工具随机误差,由于制导工具随机误差量值很小,可以忽略[2],本文主要讨论制导工具系统误差,在不引起混淆的情况下简称制导工具误差。同平台式惯导系统一样,一方面可以通过提高硬件加工精度和采用新材料新工艺来提高捷联惯导系统导航精度,但造价高昂且难以实现;另一方面可以通过误差建模,分离出制导工具误差对导航误差进行补偿。后一种方法在实践应用中受到越来越多的重视,也出现了很多误差分离方面的研究成果[3-5]。杨萍等[4]利用小增量线性化方法给出了环境函数矩阵递推计算表达式,杨华波[5]提出了利用迭代方法精确计算环境函数矩阵的方法。由于实测数据中随机误差和粗大野值的影响,制导工具误差分离效果很难通过试验进行检验,现有文献对分离效果检验主要通过理论分析和遥外差曲线判断,没有具体量化指标。本文在建立简化分离模型的基础上,利用交叉验证对分离效果进行检验,并通过仿真数据对误差分离模型和检验效果进行了验证。
1 捷联惯导制导工具误差简化模型
制导工具误差分离的基本过程是:给定遥和外测弹道参数,作差得到遥外差;建立制导工具误差模型,结合遥外差方程精确计算环境函数矩阵并估计制导工具误差系数,实现制导工具误差的分离。其中,建立简化的制导工具误差模型是保证制导工具误差分离精度,提高运算效率的基础。
1.1 模型假设
制导工具误差分离的基本模型为
ΔY=SC+η
(1)
根据捷联惯导系统原理可知,制导工具误差主要包括陀螺仪和加速度计的零位误差、漂移误差和各坐标轴方向之间的耦合误差等。为了简化分析过程,假设导弹在受到很小干扰力矩的稳定情况下飞行,其滚动、偏航以及横向视加速度和角加速度都很小。根据导弹的上述飞行特点,可以对速率陀螺和加速度计误差模型进行适当简化。
1.2 速率陀螺误差模型
速率陀螺的输出模型为
(2)

(3)

k0zk1xk1yk1z]T。
1.3 加速度计误差模型
加速度计的输出模型为
(4)
(5)
c1xc1y]T。
1.4 遥外差方程

(6)
由于用于误差分离的外测数据一般都经过误差修正和融合解算,精度较高,可以认为是真实视加速度的体现,所以式(6)左边项可以由遥测数据与外测数据作差得到。结合式(3)和(5)~(6)并忽略误差二次项,就得到视加速度的遥外差方程:
(7)
2 基于交叉验证的误差分离方法
交叉验证是一种常用的精度测试方法,其基本原理是将数据样本分成训练集和检验集,利用检验集数据对训练集得到的结果进行检验,从而测试模型或方法的精度[6-7]。根据训练集和检验集分割方法,交叉验证主要有K折交叉验证和留一验证2种划分方法。
2.1 交叉验证在误差分离效果检验中的应用
由于测量环境和测量精度的影响,参与捷联惯导制导工具误差分离的数据常有大量的随机误差和粗大野值,很多参数都对制导精度产生影响。目前制导工具误差分离的效果主要依靠理论分析和遥外差曲线进行评价,没有统一的量化检验标准,为此本文引入交叉验证,利用部分遥外测数据进行误差分离,剩余数据进行分离效果检验。交叉验证检验方法采用的训练集和检验集均来自于同一数据样本集,避免外来检验数据引入其它误差,能够客观真实反映检验效果,作为理论分析和遥外差曲线检验的补充手段,可以从量化角度进一步提高分离方法的精度和可靠性。
训练集和检验集的划分采用最常见的10折交叉验证法。由惯导系统测量原理可知,测量数据与测量时间一一对应,相对于制导工具误差分离过程来说,不同测量时刻的测量数据具有随机性。因此,将每连续10个测量数据中前9个作为训练集数据,剩下1个作为检验集数据,并且不需要重复划分即可得到满意的检验效果。如图1所示,Δt为数据采样间隔,方块代表测量数据,其中实心方块代表的数据集为训练集,空心方块代表的数据集为检验集。

图1 数据集划分示意图
2.2 检验指标

σTE越小,说明工具误差分离方法得到的结果越接近真值,从而在没有高精度检验数据的情况下仍能验证误差分离方法的精度,为捷联惯导制导工具误差分离提供了一种量化的检验指标。
2.3 制导工具误差分离步骤
引入交叉验证作为检验分离精度方法后,制导工具误差分离步骤主要包括以下过程:
1)对数据集进行划分,利用10折划分法将数据划分为训练集和检验集;
2)利用训练集数据计算遥外差;
3)利用检验集数据计算遥外差;
4)计算均方误差检验制导工具误差分离精度。
3 仿真算例
由于实测数据受测量环境影响,遥测和外测数据误差特性复杂,无法验证方法的可靠性,故采用仿真试验产生的数据进行验证。根据六自由度弹道仿真软件仿真弹道外测数据,由陀螺仪测得的姿态角与加速度计给出的加速度数据联合得到的外测数据作为遥测数据,误差系数仿真真值如表1所示。
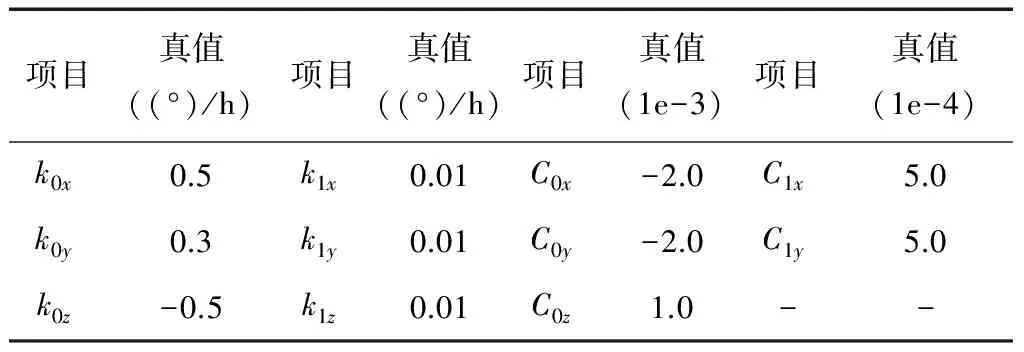
表1 制导工具误差系数仿真真值

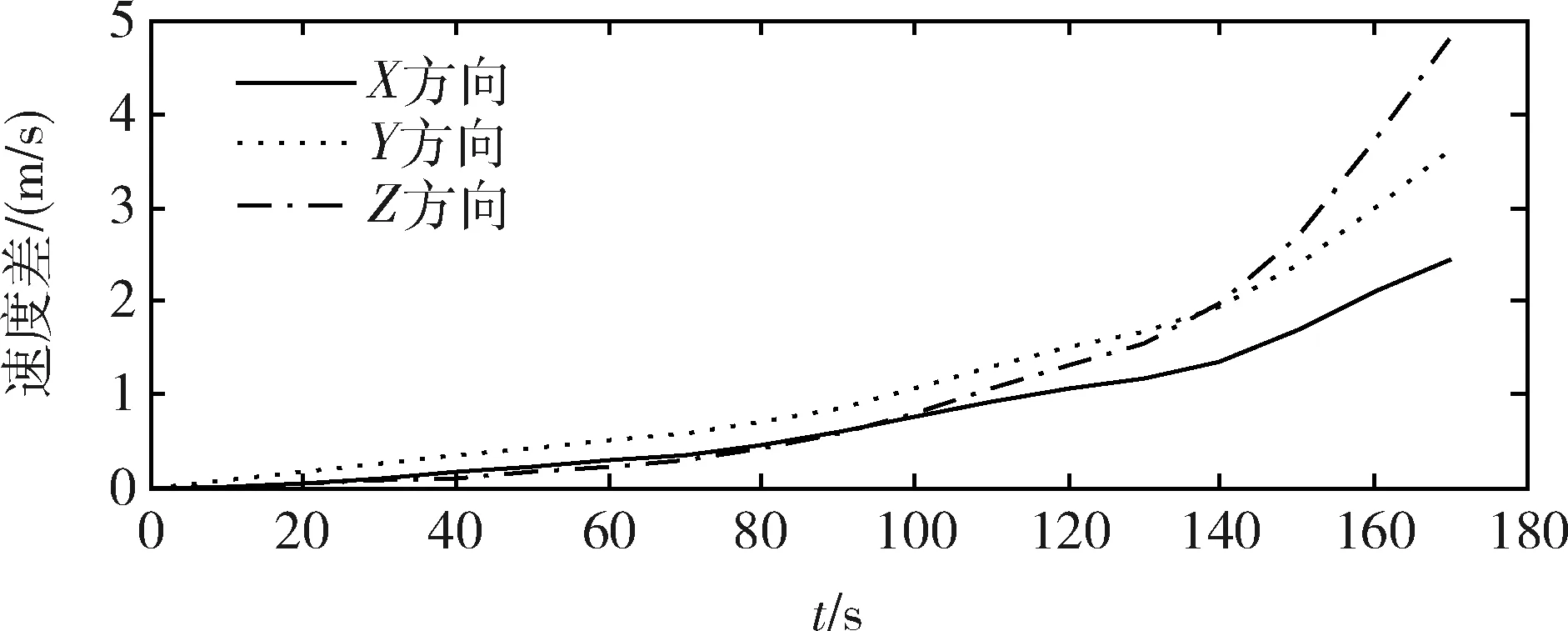
图2 验证集数据的速度遥外差

图3 仿真弹道的速度遥外差
从曲线图可以看出,遥外差曲线很难直观反映误差分离效果。根据本文提出的量化检验指标,最后得到x,y,z方向的σTE数值分别为2.78×10-4,9.90×10-4,8.66×10-4。
从σTE数值可以看出,计算得到的遥外差与真实遥外差非常接近,说明本文建立的简化捷联惯导制导工具误差分离模型的可靠性,同时具有较高的计算精度。
4 结论
基于简化的制导工具误差分离模型提出了捷联惯导制导工具误差分离方法。针对目前对于制导工具误差分离效果没有统一量化检验标准的情况,引入10折交叉验证方法检验分离精度的方法,根据均方误差准则建立了直观量化的精度检验指标,经过仿真数据验证本文提出的方法具有较高的精度和可靠性,为分析捷联惯导制导工具误差分离作了有益尝试,为进一步实测数据应用奠定了良好基础。
[1] 张金槐.远程火箭精度分析与评估[M].长沙: 国防科技大学出版,1995.(ZHANG Jinhuai. Analysis and Evaluation of Long-range Rocket Accuracy[M]. Changsha: Press of National University of Defense Technology, 1995.)
[2] 王正明, 易东云, 周海银,等.弹道跟踪数据的校准与评估[M]. 长沙: 国防科技大学出版社,1999.(WANG Zhengming, YI Dongyun, ZHOU Haiyin, et al. Calibration and Evaluation of Trajectory Tracking Data[M]. Changsha: Press of National University of Defense Technology, 1999.)
[3] 禹维绩.速率捷联系统误差分离技术[A].见: 战略导弹精度分析论文集.北京: 航空航天工业部科学技术司, 1990:25- 32.(YU Weiji. The Analysis Technique of the Errors of Speed SINS[A]. In: Article Election of the Strategic Missile Precision Analysis. Science and Technology Bureau of Aviation and Astronautics Industry Department, 1990: 25- 32. )
[4] 杨萍,刘国良,杜之明.捷联式惯导系统工具误差环境函数计算模型[J].飞行器测控学报, 2001, 20(3): 74- 80.(YANG Ping, LIU Guoliang, DU Zhiming. Environmental Function Computational Model of Guidance Instrument Error about Strapdown Inertial Navigation System[J]. Journal of Spacecraft TT&C Technology, 2001, 20(3): 74- 80.)
[5] 杨华波.惯性测量系统误差标定及分离技术研究[D]. 长沙: 国防科学技术大学, 2008.(YANG Huabo. Research on Error Calibration and Separation for Inertial Measurement Systems[D]. Changsha: National University of Defense Technology, 2008.)
[6] Cawley G,Talbot N. Fast Exact Leave- one- out Corss- validation of Sparse Least- squares Support Vector Machines[J]. Neural Networks, 2004,17(10): 1467- 1475.
[7] Cawley G C, Talbot N L C. Efficient Leave- one- out Cross- validation of Kernel Fisher Discriminant Classifiers[J]. Pattern Recognition, 2003, 36(11): 2585- 2592.
TheSeparationMethodforGuidanceInstrumentationErrorofStrapdownNavigationSystemBasedonCross-Validation
DUAN Xiuyun HUANG Yu
PLA 91550 Unit 94, Dalian 116023,China
Thecross-validationisintroducedintotheseparationmethodforguidanceinstrumentationerrorofstrapdownnavigationsystem,whichcansupplytheabsenceofquantitativeindextothetestingprogress.Firstly,asimplifiedseparationmodelisestablished.Thenthedatasetisseparatedintotwosetsknownasthetrainingsetandthetestingset.Thetrainingsetisusedtoseparatetheguidanceinstrumentationerrorandtesttheseparationeffectwiththetestingset.Thesimulationdataisproventhattheseparationmodeliscredibleandrobustandthecorss-validationcantesttheseparationresulteffectively.
Strpdownnavigationsystem;Separationforguidanceinstrumentationerror;Corss-validation
2014- 04- 16
段秀云(1979-),男,辽宁宽甸人,硕士,工程师,主要研究方向为外测事后数据处理与遥外联合数据处理;黄瑜(1979-),女,江西新建人,本科,工程师,主要研究方向为外测事后数据处理。
TJ765.3
: A
1006- 3242(2014)06- 0008- 04
