基于腱驱动的空间多指灵巧手的位置/腱张力混合控制*
2014-08-11冯敦超王小涛韩亮亮
冯敦超 王小涛 韩亮亮
1.南京航空航天大学,南京210016 2.上海市空间飞行器机构重点实验室,上海 201108
基于腱驱动的空间多指灵巧手的位置/腱张力混合控制*
冯敦超1, 2王小涛1韩亮亮2
1.南京航空航天大学,南京210016 2.上海市空间飞行器机构重点实验室,上海 201108
现有的腱驱动空间多指灵巧手通过对每一根腱施加独立的张力实现力控制,忽略了腱绳耦合运动的影响。针对“N+1”型腱驱动多指灵巧手系统内腱绳运动和腱张力耦合的问题,采用关节转矩到腱张力映射的方式解决,同时加入位置控制,构成位置/腱张力混合控制系统,实现腱驱动灵巧手的主动柔顺控制。“Matlab+ADAMS”联合仿真结果验证了算法的可行性。
空间多指灵巧手;腱驱动;N+1;腱张力;柔顺控制
随着航天技术的飞速发展, 空间飞行器的结构和组成日趋复杂, 性能和技术水平不断提高, 在这种情况下, 保证空间飞行器在复杂的空间环境中更加持久、稳定地在轨运行,已成为目前空间技术领域亟待解决的重要问题。近几十年来,各国研究机构进行了一系列地面、空间论证实验和应用研究, 结果表明空间在轨服务不仅在技术上是可行的, 而且具有巨大的研究、发展空间[1]。而作为在轨服务智能末端执行器的多指灵巧手技术在国内外也得到了蓬勃的发展。多指灵巧手具有多个多关节手指,能够和人手一样具有很高的灵巧性、通用性和适应性,采用多指灵巧手作为末端执行器对机器人智能化水平和作业水平的提高具有重要意义。
多指灵巧手的驱动方式分为驱动器内置式和外置式2种,国内研究的灵巧手均采用驱动内置式,代表性的是北航BH985手[2]和哈工大HIT/DLR II手[3],把驱动器和传动装置集成在每个手指内部,使得手指体积庞大、笨重,增加了复杂度,不适宜应用在空间在轨服务领域,同时对小体积、大扭矩电机的设计制造提出了严格要求。为了应对空间环境防护、降低复杂性和提高可靠性,空间灵巧手系统越来越多的采用外驱式的腱驱动形式,典型的有DLR-I Hand[4],R2手[5-6],DEXHAND[7]等。外置的驱动器可以减小手指体积和重量,这些特性对手指的灵巧性至关重要。由于腱只可以传递张力,因此为了获得完全独立的自由度控制,必须要保证驱动器的数量多于自由度的个数,与传统的“2N”配置方式不同,文献[8]中提出只需要比自由度的数量多1个即可,即“N+1”型腱驱动系统。然而这种方式在减少腱绳数量的同时却引入了关节位置和腱绳的耦合问题,文献[9]提出在力矩空间进行力矩分配后再转到关节空间的方式,解决了腱和关节位置的耦合问题。
为了使多指灵巧手能够可靠稳定地抓握物体,灵巧手应具有一定的柔顺性,目前阻抗控制是主动柔顺的一种主要方法,其优点是把力控制和位置控制纳入统一的框架,设计简单,但是难于实现精确的力跟踪。相对于传统的齿轮传动,腱驱动的难点在于设计一个控制器使其能按照期望的位置运动,同时保证腱的张力保持在期望的范围内。由于腱只能传递张力,而且有一定的延迟,因此在控制的过程中一定要避免出现腱的松弛,此时基本的位置加阻抗的控制策略很难实现。本文在Matlab+ADAMS联合仿真平台基础上,研究了位置/腱张力混合控制的方法,目标是保证腱张力在期望的范围内的同时进行位置控制,以达到柔顺控制的目的。
1 系统结构
参考NASA Robonaut 2灵巧手,设计了多指灵巧手的ProE模型如图1所示,该灵巧手有18个活动关节和12个独立自由度,分布在5个手指中,整个手在尺寸上与人手类似。本文主要针对图1中加深显示的食指的柔顺控制进行深入研究。如图2所示,该手指由基座、侧摆、近指节、中指节和远指节组成,采用“N+1”型腱驱动方式,具有3个独立自由度。
其中,远指节通过一个连杆机构与中指节耦合。每个独立关节装有霍尔角度传感器,每一根腱都装有张力传感器,并通过一个无刷直流电机驱动,通过滚珠丝杠把旋转运动转换为直线运动。
2 位置/腱张力混合控制
具体位置和腱张力混合控制的原理:在自由空间,采用前馈位置PD控制和最小张力混合的控制方法,使关节跟踪期望轨迹并保证腱张力在期望范围内;在接触物体以后的约束空间,采用前馈位置PD控制和完全张力控制的方法使手指以期望的接触力与物体接触,实现稳定的精确抓持。
2.1 位置控制
位置控制器的输入量为:
θe=θd-θb
(1)
其中,θe代表位置偏差,θd代表规划的关节位置,θb为手指反馈的关节位置。
因该灵巧手采用“N+1”型腱驱动,其位置控制有别于传统的齿轮传动结构,4根腱的位置对应3个独立关节,本文采用几何建模的方法实现腱位置到关节位置的解算,即在各关节处对腱的运动路径做几何简化,得到每根腱的位置与关节位置的关系。

图3 腱绳运动状态简化图
图3所示的连杆由虚线位置转到实线位置,关节转动Δθ角,腱绳x3由虚线位置运动到实线位置,关节处对应的腱绳长度由l1变为l2,根据余弦定理可知:
(2)
则,Δx3′=Δl=l2-l1。
同理,得到4根腱的位置到关节位置的转换方程:
(3)
得到腱位移的Δx(Δθ)后,为了改善位置控制的调节时间,增加系统阻尼,减少超调量,引入1个PD控制器,根据式(2)和(3)最终得到位置控制系统表达式如下:

(4)
2.2 腱张力控制器
在腱驱动灵巧手系统中,腱之间存在耦合,为了避免解耦的麻烦,在关节空间规划期望的关节力矩,然后转换成腱空间的张力。
根据手指静力学特性,事先规划出指尖接触力Fd,即可通过雅克比矩阵J反解出使手指指尖在接触到物体并保持静态平衡时所需的关节力矩τd。如公式所示:
τd=JTFd
(5)
由于腱只传递张力,为了避免腱在运动过程中出现松弛,引入腱张力控制器确保腱张力的正定性。腱张力控制器算法的基础是n个关节力矩τ和n+1个腱张力f之间的关系,如式(6)所示:

(6)
其中,t表示腱的内部张力;L∈R3×3是由3个独立关节的半径组成的对角阵;B表示腱的结构矩阵[10];WT正交于LB的行空间且正定。
系统中腱张力可控的充要条件为P可逆,要求LB行满秩[11]。根据式(6)得到:
(7)
令P-1=[Aa],则

(8)
设定腱张力取值范围[fmin,fmax],fmin保证腱始终处于绷紧的状态,fmax保护腱不超负荷。令Ai和ai分别代表A的行向量和a向量的元素。首先根据fmin确定内部张力t的取值,则有:
fi=Aiτ+ait≥fmin(其中,i=1,2,3,4)
(9)
式(9)经过变换得到式(10),计算得出t的4个值:

(10)
因此,内部张力t取式(10)的最大值即可,如式(11)所示:
t=max(ti) (其中,i=1,2,3,4)
(11)
其次,确保腱张力fi≤fmax,如果出现fi>fmax,则采用比例缩放的方式减小力矩τ分量:

(12)
其中,α为比例缩放因子,且α≤1。
综合式(5)~(12),可得腱张力分配算法表达如下:
(13)
最终得到腱张力控制器系统表达式如下:

(14)
2.3 单手指位置/腱张力混合控制
因为腱只能传递张力,因此单独的位置控制很难保证腱张力时刻大于0,而且腱本身有一定的柔韧性,对力的传递有迟滞性。而腱张力控制器则解决了这一问题,腱张力控制器可以保证腱张力在[fmin,fmax]范围内,在初始时刻时,给腱绳施加力fi≥fmin,保证腱在初始时刻有预张紧,从而可以忽略腱绳的弹性,使腱绳等效为刚体。
首先根据图2中所示腱的排列可以得出结构矩阵B,进而得到腱映射矩阵P,如下所示:


同时,根据任务要求及腱的性能设置腱张力范围fmin=8N,fmax=200N。
式(4)和(13)相加得到位置/腱张力混合控制系统方程(15):

(15)
最终完整的控制系统框图如图4所示。

图4 单指灵巧手位置/腱张力混合控制框图
3 仿真验证
为了确定上述位置/腱张力混合控制方法的有效性,在“Matlab+ADAMS”平台进行了仿真验证,把单指灵巧手PROE模型文件导入ADAMS里,利用ADAMS/Control组件把Matlab/Simulink和ADAMS模型连接在一起,构成完全非线性的物理模型[12]。
使用图5所示的阶跃信号[0° 45° 90°]作为控制器的关节角度测试信号,设定接触力的期望值为[10N 0N 0N],根据腱张力分配方法计算出期望的腱张力如图6所示。
设置仿真时间为3s,得到图7~9所示的关节位置误差、腱张力误差和接触力大小曲线,从图中可以看出,0~0.7s单手指在自由空间运动,腱张力从0N逐渐增加到设定的最小张力fmin=8N,同时关节位置保持不变,这一阶段称为腱绳的预张紧;0.7s开始向关节位置输入阶跃信号,从接触力曲线可以看出在0.8s时手指被障碍物阻挡,进入约束空间,关节位置误差不再改变,经过0.5s的调节时间,指尖接触力达到期望值,腱张力误差也趋于稳定,系统处于稳定状态;在1.7s时再次向关节位置输入阶跃信号,使手指原路返回到初始关节位置,经过0.5s的调节时间,手指关节角度达到0°,腱张力恒定为fmin。

图5 期望关节角

图6 期望腱张力

图7 关节位置误差
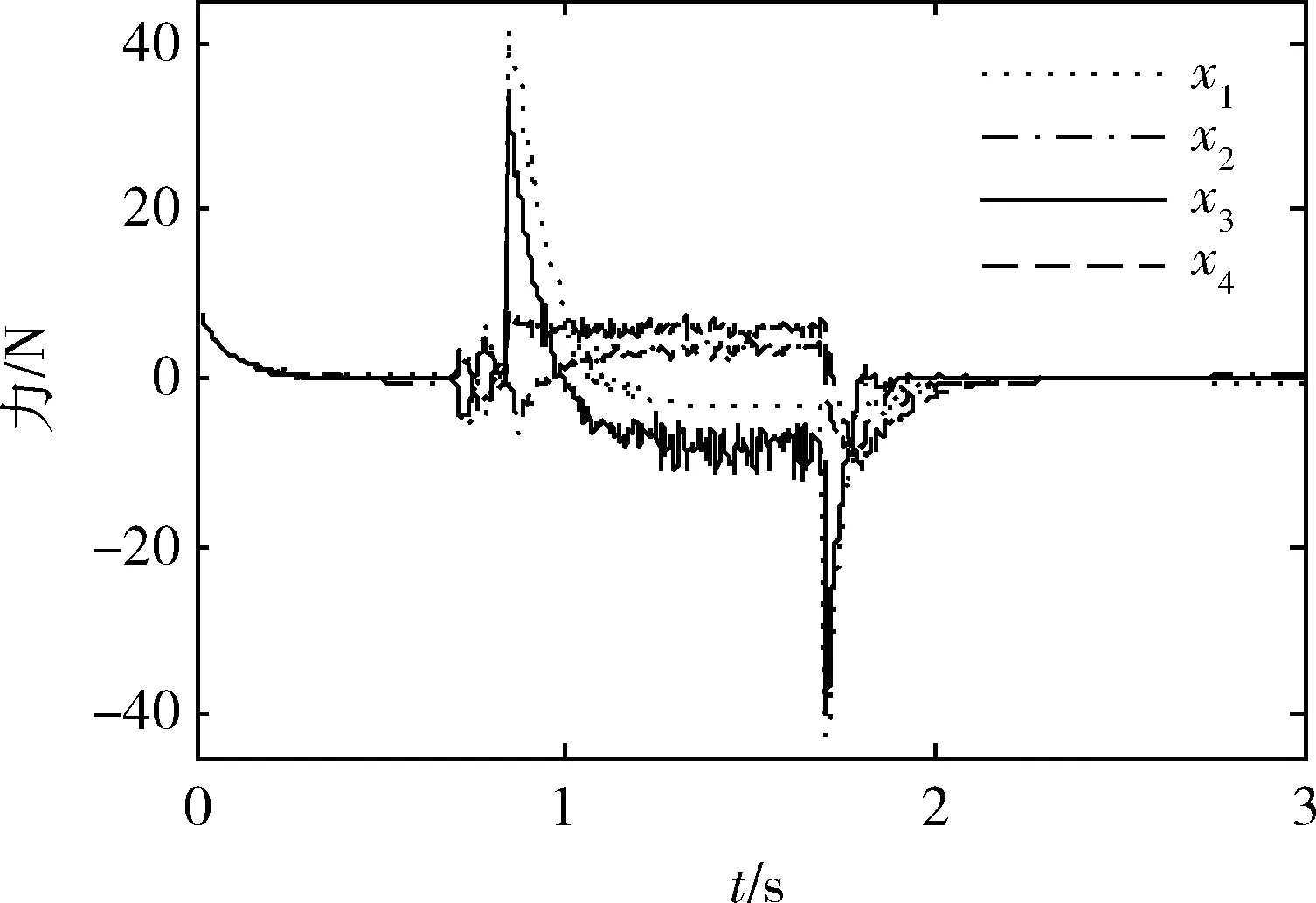
图8 腱张力误差

图9 指尖接触力
4 结论
为了使基于腱驱动的空间仿人多指灵巧手能够可靠精确的抓握物体,实现空间在轨操作,本文提出了一种新的关节位置/腱张力控制方法:前馈PD位置控制和腱张力混合控制的方法。较好的实现了单手指关节位置跟踪和腱张力控制,运用腱张力控制器解决了腱张力到指尖接触力的转换,实现灵巧手的柔顺控制。同时利用“Matlab+ADAMS”联合仿真验证了该方法的可行性,得到了期望的结果。
[1] 崔乃刚,王平,郭继峰,等.空间在轨服务技术发展宗述[J].宇航学报,2007,28(4):805- 811.(CUI Naigang,WANG Ping,GUO Jifeng,et al.A Review of On- Orbit Servicing[J].Journal of Astronautics,2007, 28(4):805- 811.)
[2] 李久振,刘博,张玉茹.北航 BH- 985 灵巧手结构设计[C].全国印刷, 包装机械凸轮, 连杆机构学术研讨会 (第 6 届全国凸轮机构学术年会)论文集, 2005: 140- 142. (LI Jiuzhen, LIU Bo, ZHANG Yu- ru. Structure Design of BH- 985 Dexterous Hand[C]. National Printing, Packaging Machinery Cam Linkage Symposium (6th Annual Conference of the National Cam) Proceedings, 2005:140- 142.)
[3] 刘伊威,金明河,樊绍巍,等.五指仿人机器人灵巧手 DLR/HIT Hand Ⅱ[J].机械工程学报, 2009, (11):10- 17.(LIU Yiwei,JIN Minghe,FAN Shaowei,et al.Five- finger Dextrous Robot Hand DLR/HIT Hand II[J].Chinese Journal of Mechanical Engineering,2009,(11):10- 17.)
[4] Hirzinger G,Fischer M,Brunner B,et al. Advances in Robotics: the DLR Experience[J].The International Journal of Robotics Research,1999,18(11):1064- 1087.
[5] Diftler M A,Mehling J S,Abdallah M E, et al.Robonaut 2- the First Humanoid Robot in Space[C].Robotics and Automation (ICRA), 2011 IEEE International Conference on. IEEE, Shanghai, 2011: 2178- 2183.
[6] Bridgwater L B, Ihrke C A,Diftler M A,et al. The Robonaut 2 Hand- Designed to Do Work with Tools[C]. Robotics and Automation (ICRA), 2012 IEEE International Conference on IEEE,Saint Paul,MN, 2012: 3425- 3430.
[7] Chalon M,Wedler A,Baumann A,et al.Dexhand: a Space Qualified Multi- fingered Robotic Hand[C]. Robotics and Automation (ICRA), 2011 IEEE International Conference on IEEE, Shanghai, 2011: 2204- 2210.
[8] Murray R M, Li Z, Sastry S S, et al. A Mathematical Introduction to Robotic Manipulation[M]. Boca Raton, FL: CRC press, 1994: 229- 233.
[9] Abdallah M E, Platt R, Wampler C W.Decoupled Torque Control of Tendon- driven Fingers with Tension Management[J].The International Journal of Robotics Research,2013,32(2): 247- 258.
[10] Lee J J, Tsai L W. The Structural Synthesis of Tendon- Driven Manipulators Having Pseudo- Triangular Matrix [J].The International Journal of Robotics Research, 1991,10(3):255- 262.
[11] Abdallah M E,Platt R,Wampler C W, et al.Applied Joint- space Torque and Stiffness Control of Tendon- driven Fingers[C].Humanoid Robots (Humanoids), 2010 10th IEEE- RAS International Conference on.IEEE, Nashville,TN,USA, 2010: 74- 79.
[12] 范成建, 熊光明, 周明飞.虚拟样机软件 MSC. ADAMS 应用与提高[M].机械工业出版社, 2006: 214- 243.
PositionandTendon-TensionHybridControlofTendon-DrivenBasedonSpaceMulti-FingeredDexterousHand
FENG Dunchao1,2WANG Xiaotao1HAN Liangliang2
1.College of Astronautics,Nanjing University of Aeronautics and Astronautics,Nanjing 210016,China 2.Shanghai Key Laboratory of Spacecraft Mechanism,Shanghai 201108,China
Theforcecontrolisappliedtoexistingtendon-drivenspacemulti-fingereddexteroushandbyusingindependenttensiononeachtendon,ignoringtheeffectsoftendonropecouplingmovement.Duetothecouplingproblembetweentendondisplacementsandtendontensioninthetendon-drivenmulti-fingereddexteroushandsystem,itcanbesolvedbythemappingofjointtorquetothetendontension,simultaneouslyaddingthepositioncontrol,tomaketheposition/tendontensioncontrolsystemwhichrealizestheactivecompliancecontroloftendon-drivendexteroushand.ThefeasibilityofthealgorithmisverifiedbytheunitedsimulationofMatlab+ADAMS.
Spacemulti-fingereddexteroushand;Tendon-driven;N+1;Tendontension;Compliancecontrol
*上海航天科技创新基金资助项目(SAST201318);上海市空间飞行器机构重点实验室资助项目(06DZ22105)
2014- 05- 05
冯敦超(1989-),男,江苏徐州人,硕士研究生,主要研究方向为腱驱动空间多指灵巧手控制技术;王小涛(1976-),男,山东潍坊人,博士,副教授,主要研究方向为航天机构驱动控制、机器视觉算法及其高速并行实现;韩亮亮(1987-),男,甘肃庄浪人,硕士,工程师,主要研究方向为空间机器人技术。
TH13;TP24
: A
1006- 3242(2014)06- 0057- 06
