摆动式横切剪运动学仿真分析及剪刃侧隙补偿研究
2014-08-10董义君刘小丹陶有能严国平
董义君 刘小丹 陶有能 严国平 严 淑
(1:中冶南方工程技术有限公司 湖北武汉430223;2:武汉凯比思电力设备有限公司 湖北武汉430223)
摆动式横切剪运动学仿真分析及剪刃侧隙补偿研究
董义君①1刘小丹2陶有能1严国平1严 淑1
(1:中冶南方工程技术有限公司 湖北武汉430223;2:武汉凯比思电力设备有限公司 湖北武汉430223)
阐述了摆动式横切剪的剪切机构,分析剪切过程并提取其运动学模型,通过对剪刃侧隙的分析,建立了补偿模型。通过运动学仿真分析绘制了剪刃侧隙补偿曲线。研究结果表明,按照剪刃侧隙为0进行补偿,其补偿曲线具有通用性,能够满足不同规格带钢对剪刃侧隙的调整要求。
摆动式横切剪 运动学 剪刃侧隙 补偿
1 引言
摆动式横切剪在带钢连续生产线上应用前景广泛,可对带钢进行切头、切尾或定尺剪切。剪切后的带钢直接进入焊机或作为成品卷包装。因此,对剪切断面质量要求高,断面必须平直、整齐。一些学者对剪切机构进行了大量分析和仿真计算。杨春青等[1]对斜刀片剪切机剪切力进行了分析;尤敏等[2]对双层剪剪切力、剪刃侧隙调整机构进行了分析;陈洁[3]采用运动闭环矢量方程对曲柄摇杆式飞剪的剪刃侧隙进行了运动学分析。这些文章主要对斜刀片剪切机、飞剪等剪切机的剪切力、侧隙调整和运动学进行计算和分析。邓亨速等[4]对液压摆式剪板机的几何参数进行了计算,其剪切对象为热轧厚板,剪切质量要求不高,剪刃侧隙不需要补偿。
摆动式横切剪用于剪切冷轧薄带钢,对剪刃侧隙要求高,是近两年研发出的新机型,未见涉及该机型的论文与报道。
2 运动学模型
2.1 剪切过程
摆动式横切剪的特点是下剪刃固定不动,上剪刃绕固定铰点摆动(该“固定铰点”位置可调,通过偏心轴调整好剪刃侧隙后,固定偏心轴以固定该铰点位置)。剪切动作由上剪刃来完成,剪切机构为多杆机构。
下剪刃为矩形平剪刃,上剪刃为V形剪刃,如图1所示。下剪刃安装在机架上,固定不动;上剪刃安装在上刀架上,通过多杆机构摆动,摆动轨迹为一段弧线,如图中双点划线所示轨迹线。剪刃从两端A1、O1首先进入剪切,依次为点A2、O2,一直到剪刃中间点An、On。多杆机构摆动到下极限位时,完成剪切。上剪刃沿原轨迹线返回,到达上极限位,即剪切准备位,准备下一次剪切动作。
从剪切原理可以看出,上、下剪刃从A1、O1,A2、O2……到An、On,即从剪刃的两端往中间依次进入剪切,剪切区域小且为连续剪切,剪切力小,可有效减轻设备重量;左右对称,受力均匀平衡,受力好。
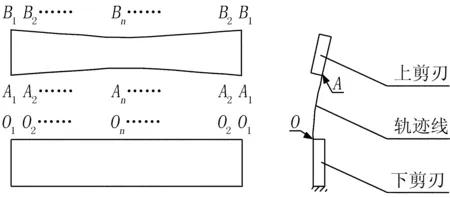
图1 上、下剪刃示意图
2.2 运动学模型
为求得剪切过程中上、下剪刃侧隙的变化,必须建立摆动式横切剪的运动学模型。
如图2所示,该多杆机构由杆1、杆2、杆3、杆4、油缸5及固定机架6(机架未示出)组成。通过调整杆1的角度,设定上剪刃在摆动过程中的某一时刻,上剪刃中点An与下剪刃中点On重合(图1),该点作为本文中阐述的剪刃侧隙补偿的基准点,然后固定杆1;上剪刃安装在杆2上,随杆2的摆动而摆动;下剪刃安装在机架6上,固定不动;杆3为连杆;杆4为摆动杆,其中间为一固定铰点,图中双点划线示出杆4右端点轨迹线;油缸5最短行程时,对应上剪刃上极限位,为剪切准备位;最长行程时,对应上剪刃下极限位,为剪切完成位。

图2 摆动式横切剪运动学模型
3 剪刃侧隙补偿
剪刃侧隙、重叠量及刃口状态等对剪切质量都有影响,剪刃侧隙是起决定性作的[5]。
从图2可以看出,上剪刃随杆2一起绕固定铰点C摆动,图中双点划线示出上剪刃剪切点A的轨迹线。该轨迹线表明,杆2摆动中,上、下剪刃对应的剪切点A、O有逐渐远离的趋势。以上、下剪刃An、On重合作为补偿基准,则上剪刃A1、A2……An-1对应下剪刃O1、O2……On-1在剪切过程中会发生干涉。
因此,为保证剪切过程中上、下剪刃相对剪切点之间的剪刃侧隙的不变,必须对剪刃的侧隙进行补偿。
3.1 补偿模型
补偿的原理是保证剪切过程中上、下剪刃剪切对应点之间的距离不变,即剪刃侧隙不发生改变。
如图3所示,取剪切行程任一位置,上、下剪刃的相对位置图。在下剪刃剪切点O建立坐标系,X轴水平往右,Y轴竖直向上。
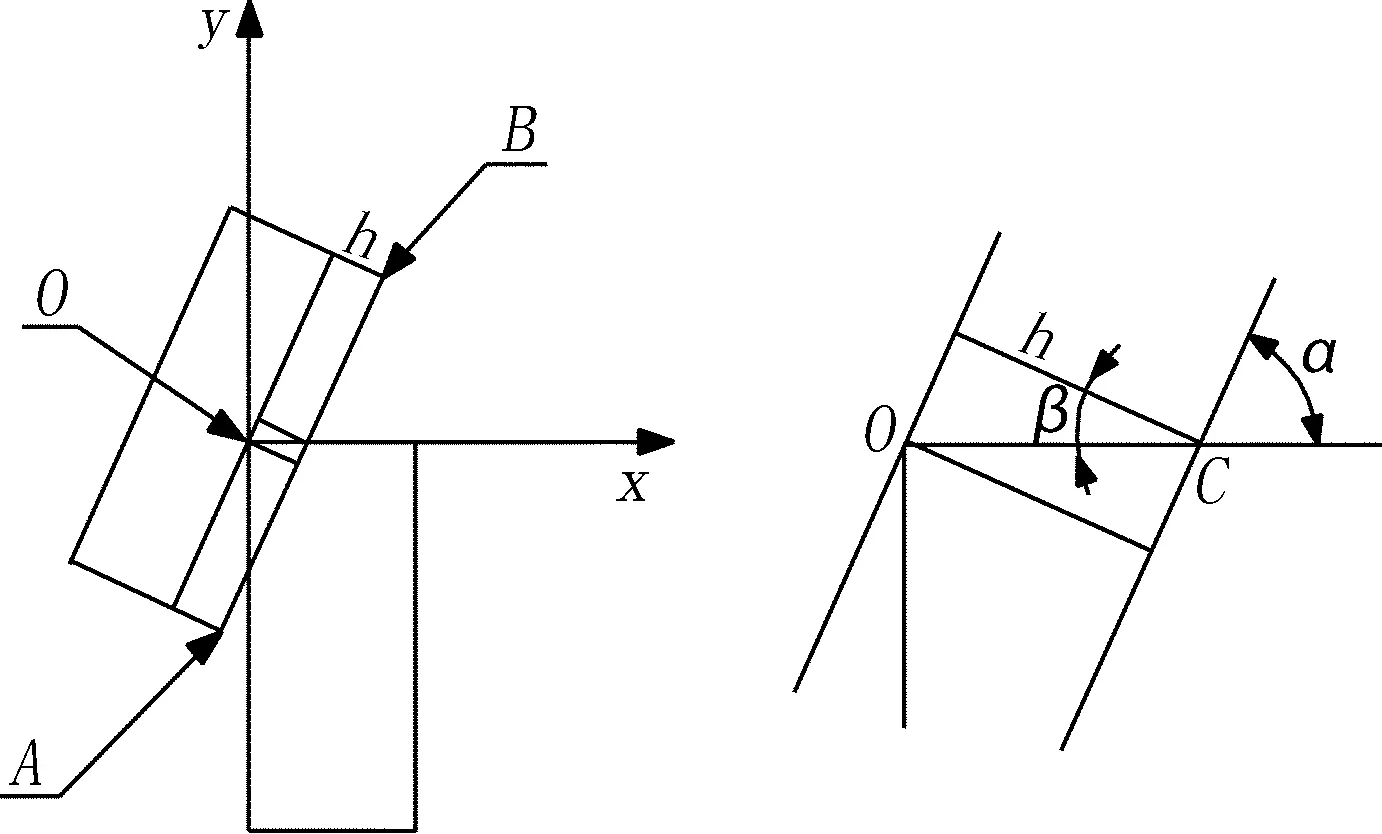
图3 补偿模型
下剪刃剪切点O(0,0),与坐标原点重合。上剪刃面向下剪刃一侧剪切面建立A(x1,y1),B(x2,y2),过O做垂直与AB的辅助线,辅助线长度为h,则在该剪切位,上剪刃的补偿量为h。
图3右图,为左图的剪切点局部放大图。直线AB与x轴相交于点C(x3,0)。
直线AB的直线方程公式为:
(1)
直线AB与x轴交点C(x3,0),令(1)式中y=0,则:

(2)
整理上式,则:
(3)
根据直角三角形边角关系,有:
h=OC×cosβ=x3×cosβ
(4)

(5)
根据直线方程斜率公式,有:
(6)
将式(3)、(5)、(6)带入式(4),则:
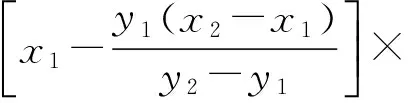
(7)
化简上式,则:
(8)
剪切判据:
x1≤0≤x2
(9)
y1≤0≤y2
(10)
由(9)、(10)两式判断上、下剪刃是否进入剪切。未进入剪切时,不需要进行剪刃补偿;进入剪切时,根据式(8)可以算出补偿量。
补偿后的上剪刃,在整个剪切过程中,可以实现上、下剪刃侧隙为0。
3.2 补偿曲线
运动学仿真是指利用仿真软件包反复求解机构运动约束方程,通过积分获得最终的速度(或加速度),从而确定机构运动的位置(和速度)。这样,一个软件包与通常求解机构运动的方法相比具有许多优点,其中最显著的优点是位置问题可以用软件包隐式求解,使用者只需为仿真包提供适当的初始条件即可以求解机构在任意时刻的位置(和速度)问题。
如图2 所示,驱动油缸5从最短极限位伸长至最长极限位,再由最长极限位缩短至最短极限位,完成一次剪切动作。
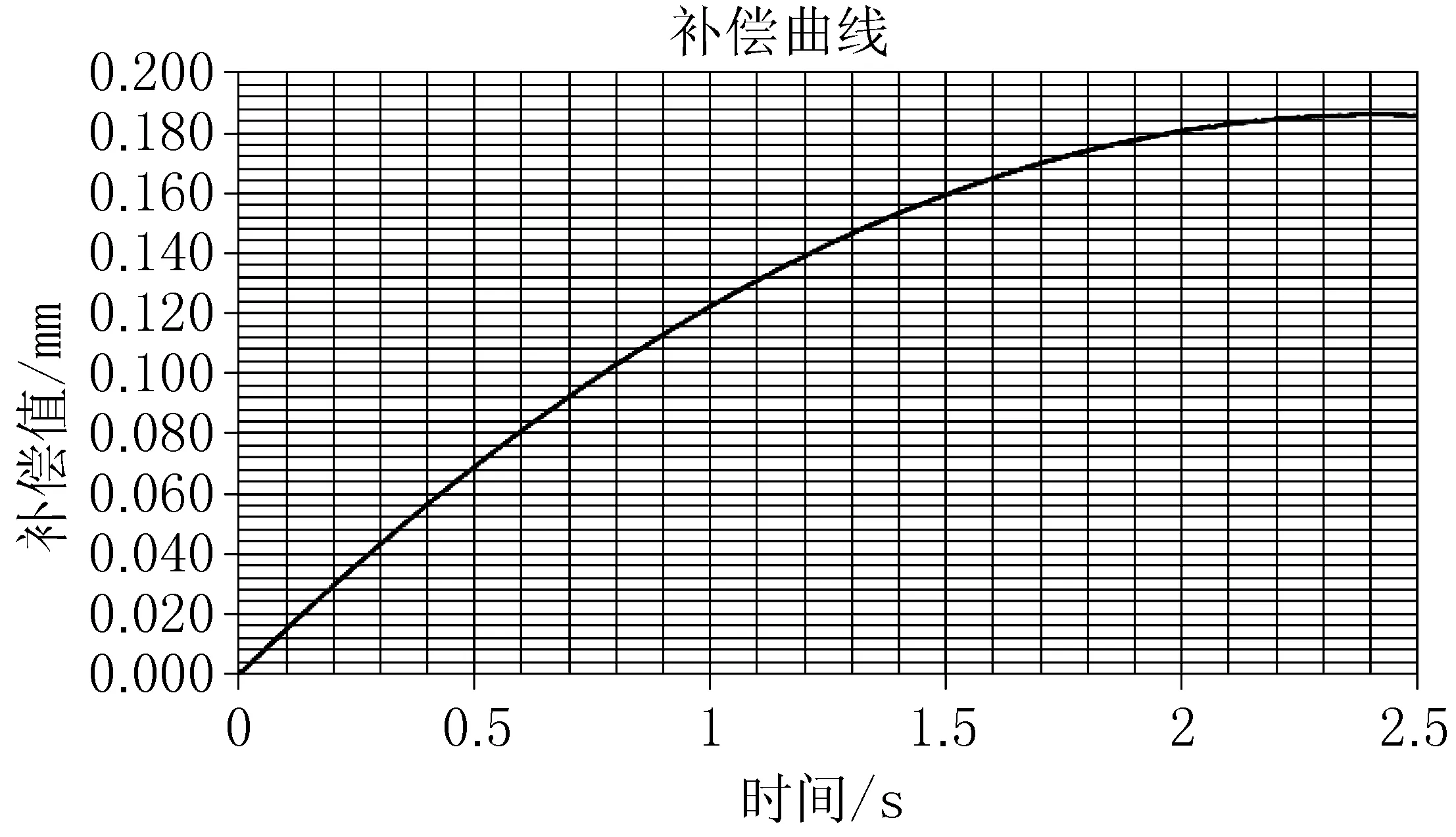
如图4所示,通过运动学仿真分析,可求得任一剪切点处,上剪刃上点A、点B的坐标。带入式(8),可求得该点的补偿值h的大小。
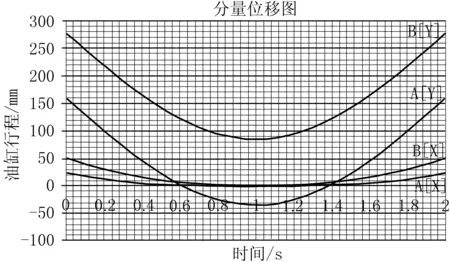
图4 分量位移图
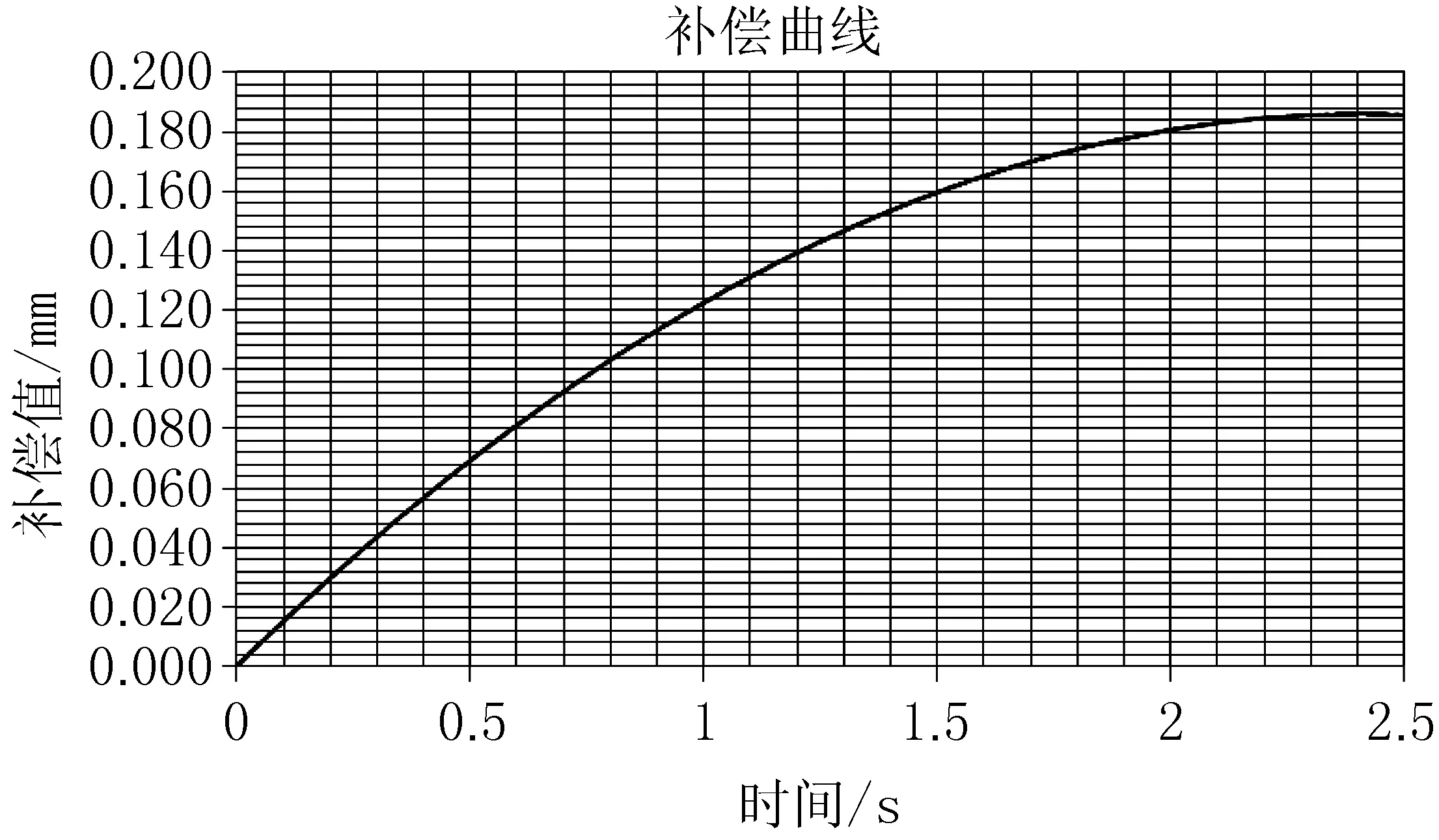
通过对全剪切过程中剪切点的补偿值计算,可求出上剪刃的补偿曲线。如图5所示,因全剪刃长度关于中间平面对称,本图显示为上剪刃1/2补偿模型。其补偿值为0.00mm数量级,为能看出补偿曲线规律,本图中补偿曲线采用了夸张画法。
因上剪刃为V形刀刃,且剪切一定次数后刃口钝化需要重新修磨,剪刃结构必须简单易于制造及修磨。所以,在上机架安装上剪刃侧按照补偿曲线加工型面(补偿曲线),上剪刃通过螺栓组固定安装在上刀架上,合理布置螺栓组间距,可在上剪刃剪切面再现补偿曲线。实际计算时,每50mm计算一个补偿值,通过样条曲线将所有补偿值连接起来形成补偿曲线。

图5 补偿曲线示意图
实践证明,按照50mm计算一个补偿值,且将补偿曲线加工在上机架剪刃侧,上剪刃通过螺栓组固定安装在上刀架补偿曲线型面上,可以达到剪切要求,剪切质量好,断面平直、整齐,满足工艺要求。
4 补偿曲线通用性分析
对剪刃侧隙为0mm的情况,进行了补偿分析。实际使用时生产线须满足不同规格钢板的剪切需求。不同带钢对应不同的剪刃侧隙,因此需对该补偿曲线的横切剪对应不同规格钢板的剪切的通用性进行分析。
如图6所示,分析了剪刃侧隙为0mm、0.25mm、2mm时补偿曲线的变化规律及数值。分析表明,不同剪刃侧隙对补偿曲线的影响数量级为0.000mm,小于补偿曲线0.00mm的数量级,因此该补偿曲线能够满足不同剪刃侧隙的补偿要求。
b)侧隙为0.25mm
c)侧隙为2mm图6 补偿曲线通用性分析
只需要调整图2中杆1的角度,即可获得大小可调且全剪切过程中大小一致的剪刃侧隙值。
5 结论
提取了摆动式横切剪的运动学模型,并建立了剪刃侧隙补偿算法,通过运动仿真分析,获得了剪刃侧隙补偿值并绘制了补偿曲线。
按照剪刃侧隙为0mm进行补偿,其补偿曲线具有通用性,能够满足不同规格带钢对剪刃侧隙的调整要求。
剪刃侧隙调整简单。通过调整偏心轴的角度,可获得全剪切过程中大小一致的剪刃侧隙,剪切断面质量高。
[1]杨春青等.下切式液压剪的设计[J].液压与气动,2012(8):37-38.
[2]尤敏等.双层剪的设计与分析[J].冶金设备,2012(6):22-25.
[3]陈洁.曲柄摇杆式飞剪剪刃间隙研究[J].重型机械,2013(1):40-42.
[4]邓亨速等.摆式剪板机的几何参数与计算[J].现代机械,1986(1):19-22.
[5]吴志生.冷轧板带切边变形过程及其影响因素[J].轻合金加工技术,2001,Vol.29(12):23-24.
[6]陶有能.切边圆盘剪设计[J].华中科技大学学报(城市科学版),2006,Vol.23(增刊2):77-79.
欢迎投稿 欢迎订阅 欢迎刊登广告
Kinematics Simulation Analysis of Swing Crosscut Shear and
Research of Shear Side Clearance Compensation
Dong Yijun1Liu Xiaodan2Tao Youneng1Yan Guoping1Yan Shu1
(1:WISDRI Engineering & Research Corporation Limited, Wuhan 430223; 2:Wuhan Kempinsh Power Equipment Co.,Ltd., Wuhan 430223)
This paper, the shear structure of swing crosscut shear is elaborated, analyzes the cutting course and extracts kinematics model, and builds compensation model through the analysis of shear side clearance. The shear side clearance compensation curve is put forward by analysis of kinematics simulation. The research proves that, the compensation curve is universal on the basis of zero shear side clearance, which can meet the adjusting requirement of shear side clearance for various strip steel.
Swing crosscut shear Kinematics Shear side clearance Compensation
董义君,男,1983年出生,毕业于武汉大学动力与机械学院,硕士,工程师,从事轧钢设备的研究与设计
TG333.2
A
10.3969/j.issn.1001-1269.2014.04.004
2014-04-22)
