三维超声波测距仪的设计
2014-08-08贾强
贾 强
(天津现代职业技术学院 天津300350)
三维超声波测距仪的设计
贾 强
(天津现代职业技术学院 天津300350)
三维超声波测距仪由电源电路、数码管显示电路、摇杆信号采集电路、舵机驱动电路、超声波模块、舵机云台以及 MSP430单片机系统等几部分组成。经实际测试证明,该类测距仪工作稳定,能满足一般近距离测距的要求,且成本较低、有良好的性价比。
MSP430单片机 超声波 舵机 摇杆
0 引 言
三维超声波测距仪是一种传统实用的非接触测量仪器,与激光、涡流和无线电测距方法相比,具有不受外界光及电磁场等因素影响的优点,在比较恶劣的环境中也具有一定的适应能力,比如有毒或腐蚀性化学物质液面高度的测量或高速公路上快速行驶汽车之间的距离等。此外,三维超声波测距仪结构简单、成本低,在工业控制、建筑测量、机器人定位方面得到了广泛的应用。
目前市面上常见的超声波测距系统价格昂贵、体积过大且精度不高,在一些中小规模的应用领域中难以得到推广。为解决这一系列难题,本文设计了一款基于 MSP430单片机的低成本、高精度、微型化的超声波测距仪。
1 三维超声波测距仪的原理
发射器发出的超声波以速度 v在空气中传播,在到达被测物体时被反射返回,由接收器接收,其往返时间为 t,由S=vt/2即可计算出被测物体的距离。由于超声波也是一种声波,其声速 v与温度有关。在使用时,如果温度变化不大,则可认为声速是基本不变的。如果测距精度要求很高,则应该通过温度补偿的方法加以校正。
本设计的优点在于超声波的明显特征是方向性好、穿透性强,尤其是在光不透明的固体中,碰到杂质或分界面就有显著的反射。用超声波测距离是由测量发射的超声波与接收到被测物体反射的回波之间的时间差来确定的。
2 设计方案
2.1 方案论证
2.1.1 方案1:数字电路实现
通过数字电路的一些编码和解码特性来设计。该方案的精确度不高,容易出现一些不良因素。数字电路虽然集成大于模拟电路,但控制并不方便,因此不适合本设计的要求。
2.1.2 方案2:单片机实现
单片机是一种集成电路芯片,是采用超大规模集成电路技术把具有数据处理能力的中央处理器CPU、随机存储器RAM、只读存储器ROM、多种I/O口和中断系统、定时器/计数器等功能(可能还包括显示驱动电路、脉宽调制电路、模拟多路转换器、A/D转换器等电路)集成到一块硅片上构成的一个小而完善的微型计算机系统。单片机从 20世纪 80年代的4位、8位单片机,发展到现在300,M的高速单片机。它具有受集成度限制、片内存储器容量较小、一般内ROM在8,KB以下、可靠性高、易扩展、控制功能强、易于开发等特点。
2.1.3 方案的比较
方案1的设计电路较为繁琐;方案2的单片机具有电路简单、方便、成本低等优点,便于使用,因此本设计采用MSP430单片机实现。
2.2 系统结构设计
此设计由数码管模块、超声波模块、舵机模块、遥杆电位器、电源电路和 MSP430核心板构成,电源电路提供驱动电路所需的5,V电源;数码管显示电路由单片机直接控制;摇杆信号采集电路由摇杆电位器及AD信号分别控制舵机的横向及纵向运转;舵机驱动电路由单片机脉冲信号电路构成,超声波模块由超声波测距传感器及信号处理电路构成;舵机云台为安装舵机及超声波模块的机构。系统结构设计如图 1所示。
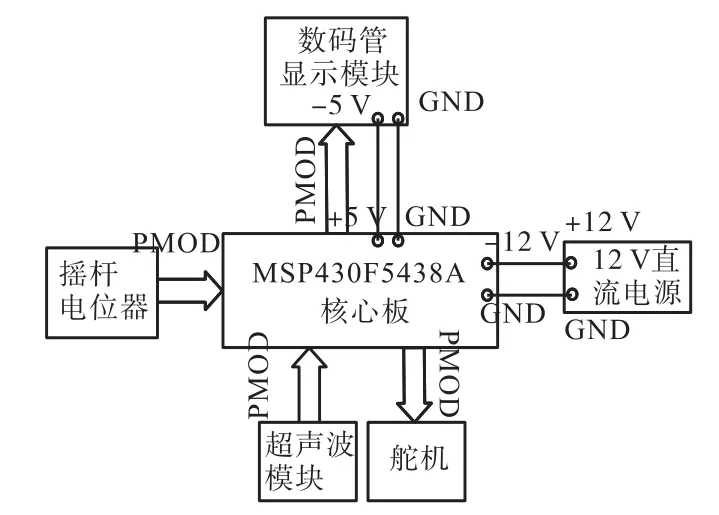
图1 系统结构设计图Fig.1 System structural design drawing
3 主要元器件简介
3.1 主芯片MSP430
MSP430系列单片机是一个 16位的单片机,采用了精简指令集(RISC)结构,具有丰富的寻址方式(7种源操作数寻址、4种目的操作数寻址)、简洁的27条内核指令以及大量的模拟指令;大量的寄存器以及片内数据存储器都可参加多种运算;还有高效的查表处理指令。这些特点保证了可编制出高效率的源程序。
3.2 电源
开发板使用DC 5,V的外部供电,跳线J3实现了开关功能。电源接通后D6的LED点亮。
3.3 复位按键
S13为复位按键。按下复位按钮,即可将程序复位,从头开始执行。
3.4 键盘
开发板设有 12个按键,为 3×4的行列扫描键盘。使用P3.0到P3.7端口,P3.0、P3.1、P3.2为行线,P3.4、P3.5、P3.6、P3.7为列线。列线分别由上拉电阻拉到 VCC,在行线与列线的每一个交接处有一个按键,按键的两端分别接在行线和列线上。如果有键按下,则与之相连的行线与列线被连通,即可检测按键。
3.5 LCD显示
LCD采用的是12,864点阵型液晶显示屏。
3.6 LED
P9.0、P9.1、P9.2、P9.3、P9.4 口接有 LED,设置各口为输出高电平时LED点亮,低电平时熄灭。
3.7 扩展IO口
开发板两侧的双排插针。
4 硬件电路设计
4.1 MSP430核心板及下载口的原理图(见图2)
4.2 电源电路(见图3)
4.3 数码管显示电路(见图4)
4.4 摇杆电位器、舵机和超声波接口电路图(见图5)
5 软件设计(见图6)
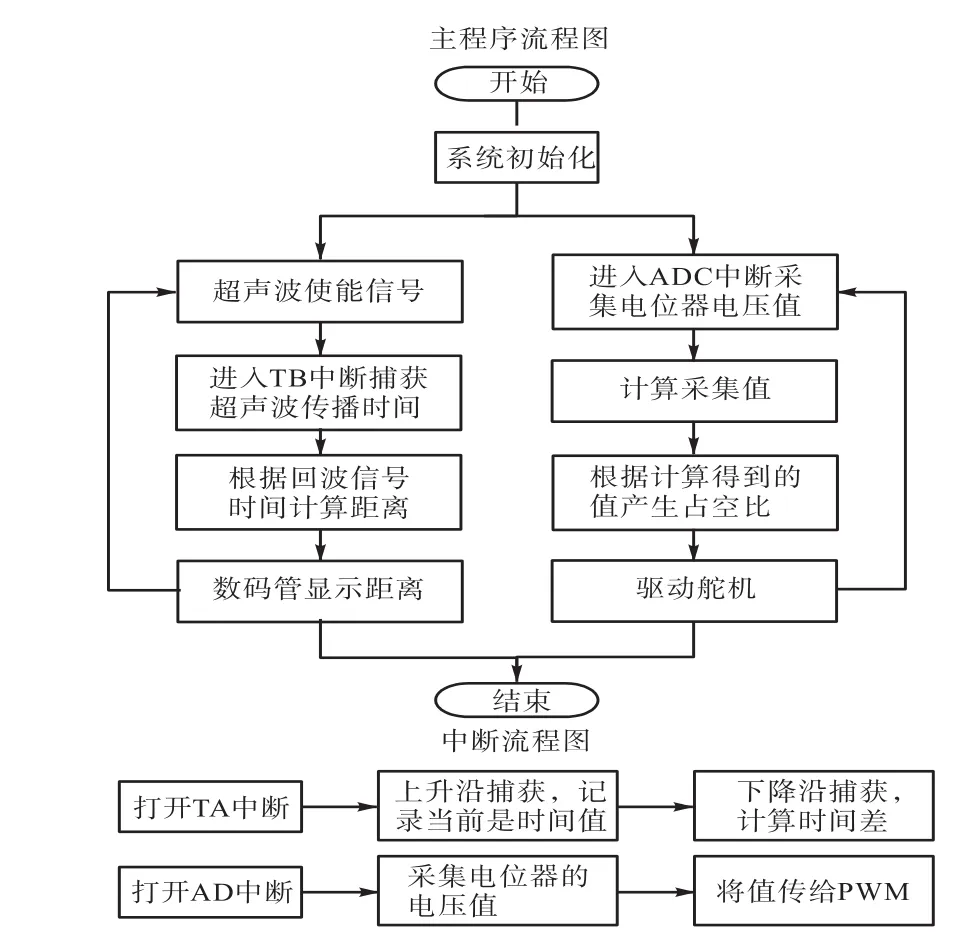
图6 主程序流程图及中断流程图Fig.6 Main program flow chart and interruption flow chart
6 系统框图(见图7)
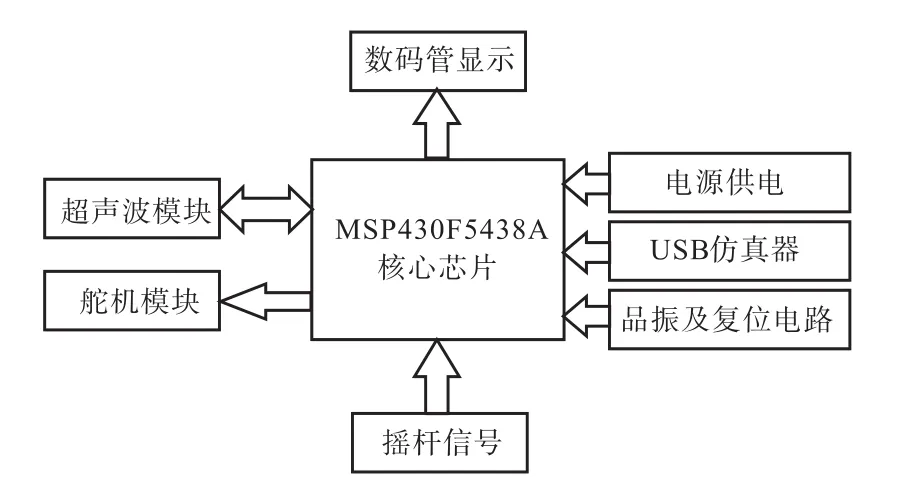
图7 系统框架图Fig.7 System framework diagram
三维超声波测距仪的系统模块框图主要描述了三维超声波测距仪的 7大组成模块以及模块之间的相互关系。摇杆的电压通过单片机的核心芯片进行采集然后传给舵机,超声波模块通过核心芯片处理将测得的距离用数码管显示出来。
7 结 论
利用单片机设计的测距仪便于操作、读数直观。经实际测试证明,该类测距仪工作稳定,能满足一般近距离测距的要求,且成本较低,具有良好的性价比。由于该系统中锁相环锁定需要一定时间,测得的距离有误差,在汽车雷达应用中可忽略不计;但在精度要求较高的工业领域如机器人自动测距等方面,此误差不能忽略,可以通过改变一些硬件的应用实现对超声波的快速锁定或根据需要在程序中加入测距软件补偿的代码,使误差进一步减小,以满足更高的要求。
本设计完整实现后可测量 10,m以内的距离。由于超声波的特性,测距时应保证传感器与被测物之间以及测量轴线上不存在障碍物,且要尽量保证传感器轴线与被测物表面垂直。实际测距范围与被测物表面材料等因素有关,一般不建议测量表面为毛料的物体。
[1]林伟,梁家宁,李才安. 便携式多功能超声波测距仪的设计与实现[J]. 电子测量技术,2008(1):29-31.
[2]陈美銮,尹浩,黎飘,等. 智能盲人导行仪的设计与实现[J]. 电子技术应用,2006(10):2-5.
[3]罗庆生,韩宝玲. 一种基于超声波与红外线探测技术的测距定位系统[J]. 计算机测量与控制,2005(4):1-3.
[4]高飞燕. 基于单片机的超声波测距系统的设计[J]. 信息技术,2005(7):43-45.
[5]赵海鸣,卜英勇,王纪婵,等. 一种高精度超声波测距方法的研究[J]. 湖南科技大学学报(自然科学版),2006(3):8-10.
[6]路锦正,王建勤,杨绍国,等. 超声波测距仪的设计[J]. 传感器技术,2002(8):9-11.
[7]牛余朋,成曙. 基于单片机的超声波测距系统[J]. 兵工自动化,2005(4):44-46.
[8]张健,李钢. 超声波测距系统的研究与设计[J]. 合肥工业大学学报(自然科学版),2004(6):13-15.
Design of a Three-dimensional Ultrasonic Range Finder
JIA Qiang
(Tianjin Modern Vocational Technology College,Tianjin 300350,China)
The three-dimensional ultrasonic range finder is mainly composed of power circuit,digital tube display circuit,rocker arm signal acquisition circuit,servo drive circuit,ultrasonic module,steering gear cloud deck and MSP430,single chip microcomputer system. It was proved that the range finder features stabilization,low cost and good cost performance and may satisfy range finding requirements within close ranges.
MSP430,single chip microcomputer;ultrasonic wave;steering gear;rocker
TB51+7
A
1006-8945(2014)08-0026-04
2014-07-06
