基于视频的车辆速度自测量
2014-08-08沈文杰
孙 浩,沈文杰
(天津市计量监督检测科学研究院 天津300192)
基于视频的车辆速度自测量
孙 浩,沈文杰
(天津市计量监督检测科学研究院 天津300192)
在现代智能交通系统中,车辆速度是一个基本参量,如何快速精确地测量出车辆速度已经成为当今的一个研究重点。车辆速度的测量分为主动式和被动式测量,利用基于纹理的模板匹配算法,提出了一种基于视频的主动式测量车辆自身速度的方法,并利用DSP技术实现了实时测量。
速度测量 车辆检测 DSP并行算法
0 引 言
现代社会中,汽车已经成为交通系统的主要组成部分。对车辆的控制成为交通管理的重要一环。车辆速度是车辆运行状态中最重要的参量,如何实时精确地测量出车辆速度是当今研究的重点与热点。目前的车速检测主要分为被动式和主动式,本文克服了主动式测量方法中难以找到有效相对静止点作为基础点的问题,提出了一种基于视频的车辆自身速度测量。
1 基于视频的车辆速度自测量
车辆行驶过程中,在车辆的侧方会有相对静止的景物的变化,如树木、灯杆等。这就为车辆速度的测量提供了基准点,通过视频检测和跟踪技术,再辅以激光测距仪的距离测量,即可实时得到车辆自身速度。
1.1 基本原理
将测距仪和摄像头同轴安装在车辆行驶方向的垂线上,当目标进入摄像头的视野中时,可以人为或自动地检测出目标,然后使用模板匹配算法进行跟踪。当目标行进到视野中间时,激光测距仪测得目标距离,并记录下当前时间。当目标继续运动时,可通过像素数计算出目标偏离视野中线的角度,通过解直角三角形即可得到目标运动的距离,即车辆行驶的距离,再根据时间信息即可得到当前车辆的速度。
1.2 数据流程图
数据流程如图1所示。
2 目标检测算法
基于视频的目标检测算法是现今图像处理领域研究的重点。目标检测算法主要分为运动目标检测和静止目标检测。运动目标检测利用的是目标与背景的相对位移,通过帧间差分等方法实现目标与背景的分离,常见的应用有车辆检测、入侵检测等;常用的方法有高斯模型运动检测、码书模型运动检测等。而静止目标检测是通过对已知目标的特征进行提取,然后对图像进行分割、匹配,从而达到目标与背景分离的目的。常见应用有人脸检测、指纹检测等,常用方法有基于颜色特征的图像分割技术或基于纹理特征的图像分割技术。本文所需要检测的目标相对于背景是静止的,所以需要用到静止目标检测的方法。同时,本文所需要的检测精度很低,因此,采用边界分割就可以满足精度要求。

图1 车辆自速度测量数据流程图Fig.1 Data flowchart of vehicle speed measurement
2.1 图像边界检测
边缘是指图像局部灰度变化最显著的部分。边缘检测最基本的思想是,计算局部微分算子,将梯度用于图像边缘检测是一阶微分边缘检测算子的实现方法。使用 Sobel算子可以得到图像的边缘,然后计算滤波后图像的灰度均值,计算后的图像灰度大于均值的点认为是边缘,其余的认为是背景。
2.2 图像边界分割
本文所论述的测速方法,只需要将图像分割为垂直的块,不用考虑图像的水平边界信息。因此,在边界检测时,只需要将Sobel算子的第2个矩阵与图像进行卷积,得到边界后,统计图像每一个横坐标上有多少个点被认为是边界,在非连续的横坐标上有高于阀值的横坐标被定义为边界,两个边界之间的部分被认为是一个目标,这样就利用边界将图像分割为多个目标,即可对每个目标分别进行跟踪。
目标检测的DSP处理数据流程见图2:
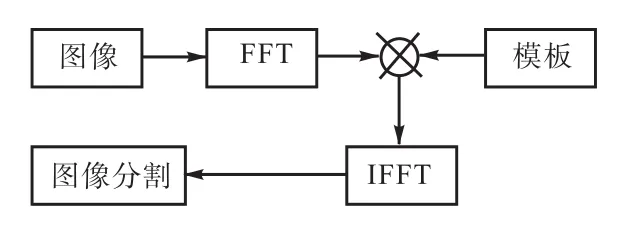
图2 DSP处理数据流程图Fig.2 Flow chart of DSP data processing
3 目标跟踪算法
静止目标的跟踪算法可以使用基于纹理的模板匹配算法。
3.1 基于纹理的模板匹配算法
基本的算法思路是:
① 将目标模板分别按行列方向提取纹理矩阵:

② 将图像分别按行列方向提取纹理矩阵:
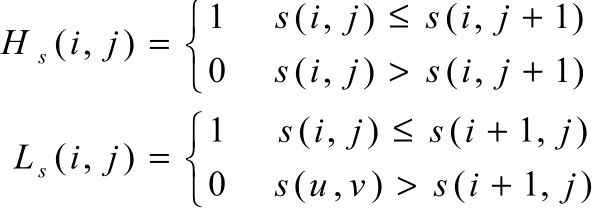
③ 计算图像各像素点的相似度:

④ 相似度最大的点被认为是最佳匹配位置。
3.2 纹理模板匹配算法的DSP改进
由于算法中计算目标图像与模板图像之间的匹配置信度较为复杂,运算量大,匹配时间长,严重制约其在实时系统中的应用。下面对上述算法进行了改进:在对目标图像与模板图像提取两个方向的二值纹理矩阵前,每个像素由一个字节(8 bits)二进制码表示,二值化后每个像素可由1 bit二进制码表示。因此,在提取二值纹理矩阵后,虽然目标图像与模板图像分别变换为两个方向上的矩阵,但存储量分别变为原先的1/8,大大节省了存储空间。
在本算法中引入逻辑运算,将相似度计算的方法改为同或和累加运算,即:
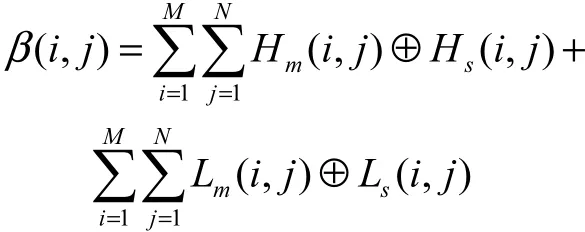
这步可以并行实现,因此使用 DSP进行处理可以有效节约时间,完成使用 DSP对目标进行检测与跟踪。
4 结 语
本文通过基于视频的目标检测与跟踪算法,提出了一种有效测量车辆自身运动速度的方法,这种方法理论上具有更好的实用性和精确度,但是需要进行大量的图像处理计算。因此,使用DSP处理可以很好地解决实时性问题。本文也针对DSP处理对算法进行了改进,使其更好地适应DSP并行计算的需要。
[1]马迎军,郭雷. 一种基于图像纹理的模板匹配算法的改进与实现[J]. 计算机应用研究,2007,24(6):158-160.
[2]刘铁军,史泽林,于海斌. 一种基于图像纹理的模板匹配算法[J]. 红外与激光工程,2005(3):70-74.
[3]Rafael C. Gonzalez,Richard E. Woods. 数字图像处理(第二版)[M]. 北京:电子工业出版社,2007:463-473.
On Video-based Active Measurement of Vehicle Speed
SUN Hao,SHEN Wenjie
(Tianjin Institute of Metrological Supervision and Testing,Tianjin 300192,China)
Vehicle speed is a basic parameter in modern transportation system,and how to quickly and accurately measure the speed has become a research focus. The measurement can be divided into active measurement and passive measurement. Based on texture template matching algorithm,a method of active measurement was proposed and real-time measurement was realized through DSP technique.
speed measurement;vehicle detection;parallel algorithm with DSP
U467.4+91
A
1006-8945(2014)08-0080-02
2014-07-06
