水下航行体船载发控装置设计与实现
2014-08-07田立
田 立
(昆明船舶设备试验研究中心,昆明65000)
水下航行体船载发控装置设计与实现
田 立
(昆明船舶设备试验研究中心,昆明65000)
介绍了基于GPS技术的某型水下航行体船载发控装置的硬件构成及软件设计方法,解决了传统方式下使用船载电罗经预热时间长、信号抗干扰能力差等问题,同时为了提高发控装置的测试性能、可靠性,提出适用于水下航行体船载发控装置的PHM系统设计方案。
水下航行体;单板计算机;全球定位系统;多线程;故障检测与健康管理
1 引 言
当前船载发控装置大多利用船载电子罗经进行定位定向,而某型水下航行体的发射工位距离操作室远,如果直接使用,易造成现场连线零乱,信号线易受干扰,电罗经开机预热时间长等弊端。本文通过集成一块具备定位定向功能的GPS板卡,有效解决了这一问题。故障预测与健康管理(Prognostics and Health Management,PHM)技术的应用提高了系统的故障诊断和预测精度。
PHM技术是一种智能健康管理技术,它集可靠性估计技术与故障预测技术于一身,为复杂系统在实际应用环境下的在线可靠性评估与故障预测提供了一种新的技术手段[1-2]。
2 功能及原理
在合理继承成熟经验和满足水面舰艇环境要求的基础上,研究实现了一种基于GPS技术、具备PHM功能的发控装置。某型水下航行体发控装置安装于舰船船尾,GPS双天线平行于水下航行体导轨安装,用于对某型航行体的光纤陀螺提供发射时刻的经纬度、航向、北京时间等信息。发控装置主要完成对某型水下航行体的上电、自检、参数装订、发射等操作。
发控装置主要由:机箱、单板计算机、电源模块、上电控制模块、通讯模块、GPS模块、显示屏、交流滤波器、键鼠和底板等九部分组成,如图1所示。各功能模块通过锁死结构紧密的安装在底板上,增强了发控装置的抗震性。各模块功能如下。
(1)电源模块为单板计算机、控制通讯模块、GPS模块提供供电管理;
(2)控制通讯模块通过单板计算机控制水下航行体的上电及通讯;
(3)GPS模块以115200bit/s的速率、50Hz的频率将接收到的经纬度、航向、时间等信息通过串口发送至单板计算机,单板计算机将这些信息数据处理后实时下发给水下航向体。
发控装置的工作原理是单板计算机发送上电指令给控制通讯模块,控制通讯模块输出高电平控制航行体的上电,上电正常后,发送各种控制指令、控制导航参数、声学参数及经GPS模块接收的信息到某型水下航行体,同时接收来自水下航行体回复的状态信息。
图1 发控装置硬件结构图
3 硬件设计
3.1 控制通讯模块设计
控制通讯模块由控制模块和通讯模块两部分组成。控制部分主要用于控制水下航行体的上电,通过单板计算机的RS232串口发送上电指令给控制通讯模块上的单片机,由单片机的I/O口输出一路高电平控制继电器吸合,达到给水下航行体上电的目的,如图2所示。
图2 控制上电模块部分电路原理图
通讯模块采用以太网与水下航行体通讯,预留CAN通讯接口,便于以后扩展。将单板计算机发出的RS232串行接口信号转换为以太网接口信号,发送至水下航行体。控制通讯模块主控制器采用XC167CI单片机,以太网控制器采用DM9000AEP,同时采用YL18-2050S隔离芯片实现以太网接口隔离和保护,TJA1040T作为CAN收发芯片。软件编程采用uVision Keil3集成开发环境和DAVE软件配置器进行。采用外部快速中断响应以太网数据帧的接收。
3.2 GPS模块集成
GPS模块功能是接收经纬度、航向角、UTC时间等信息,并通过RS232通讯口发送至单板计算机。通过集成一块单板式结构的双频双系统定位定向的板卡BD982,实现了厘米级的定位精度,定向精度小于1°(2m基线)。上位机发控软件完成对GPS模块基线长度、数据输出格式等参数的设置[3-4]。
$GCCMD语句用于设置GPS模块,设置参数存储于永久存储器中,如果设置语句无错,则GPS会响应语句,否则返回语句将显示当前默认值。
BD982模块的部分设置语句如下:
设置基线长度语句:$GCCMD,set baseline,X*FF保存设置语句:$GCCMD,SAVE CONFIG*FF基线长度设置并保存成功后,立即生效。
4 软件设计
4.1 软件结构
为了能够满足软件可靠性和可操作性要求,同时方便设计与后续的完善、修改,考虑到软件功能的独立性,采用模块化设计思路,将各功能模块封装成不同的函数,完成各自不同的软件功能。发控软件包括参数设置模块、参数装订模块、通讯模块、GPS信息接收模块、PHM系统模块、经纬度解算距离航行角模块、上电模块、自检模块、发射模块、中止模块、授时模块、数据记录模块、数据显示模块等功能模块。其主要软件功能模块框图如图3所示。
图3 发控软件功能模块框图
4.2 软件功能
发控软件的功能是完成对航行体的上、断电操作,参数设置解算及装订工作。通过RS232口2将实时接收到的GPS位置信息、航向信息,通过数据分拣、打包下装至航向体。通过软件的主界面将输入的两个点的经纬度信息解算成距离和航向角的航路点信息下装至水下航行体。
通讯模块用于将来自两个串口的数据进行接收、分拣和保存;经纬度解算模块主要作用是将两个点的经纬度信息解算成距离和航向角的航路点信息下装至水下航行体。参数设置模块的功能是完成GPS模块、航行体控制系统、声学系统等模块的参数设置;参数装订模块用于将前面设置的参数通过打包发送至GPS模块和航行体;PHM系统实现发控仪和航行体各系统的故障诊断和预测。
5 关键技术
5.1 多线程处理
此发控软件基于Windows XP操作系统,使用VC++6.0作为程序设计语言进行软件开发。由于Windows XP采用非实时操作系统,而发控装置需要接收和处理多个模块同时发送的状态信息或命令响应信息,为了保证发控操作的实时性,软件采用多线程技术[5]。在软件初始化时,创建用户界面主线程和2个数据接收线程。主线程用于响应用户输入和各种事件消息,数据接收线程主要用于串口和以太网数据的接收。通过查询方式循环检测各通道的FIFO,当FIFO里有数据并且不小于帧长度时接收数据。
5.2 PHM系统
发控装置的PHM系统采用主从模式,由各个航行体PHM节点和发控装置PHM主控制器组成。各PHM节点内嵌在各节点单机内,负责所在单机的故障自检、健康信息采集及发控装置PHM主控制器的信息交互。发控装置做为PHM的主控制器,负责水下航行体各个节点的诊断工作,它可以对汇总的各节点健康信息进行融合分析,从系统层面对某个节点的异常状态进行检测。同时,发控装置还负责短期的故障预测工作,对各节点健康参数的变化趋势进行短期预测,对不利预期做出早期诊断,其体系结构如图4所示。
6 结束语
某型水下航行体发控装置通过集成一块GPS板卡的方式,解决了传统方式下使用船载电罗经带来的诸多不便。PHM系统的构建,提高了系统故障诊断和预测精度。该发控装置现已批产交装部队,运行稳定可靠。
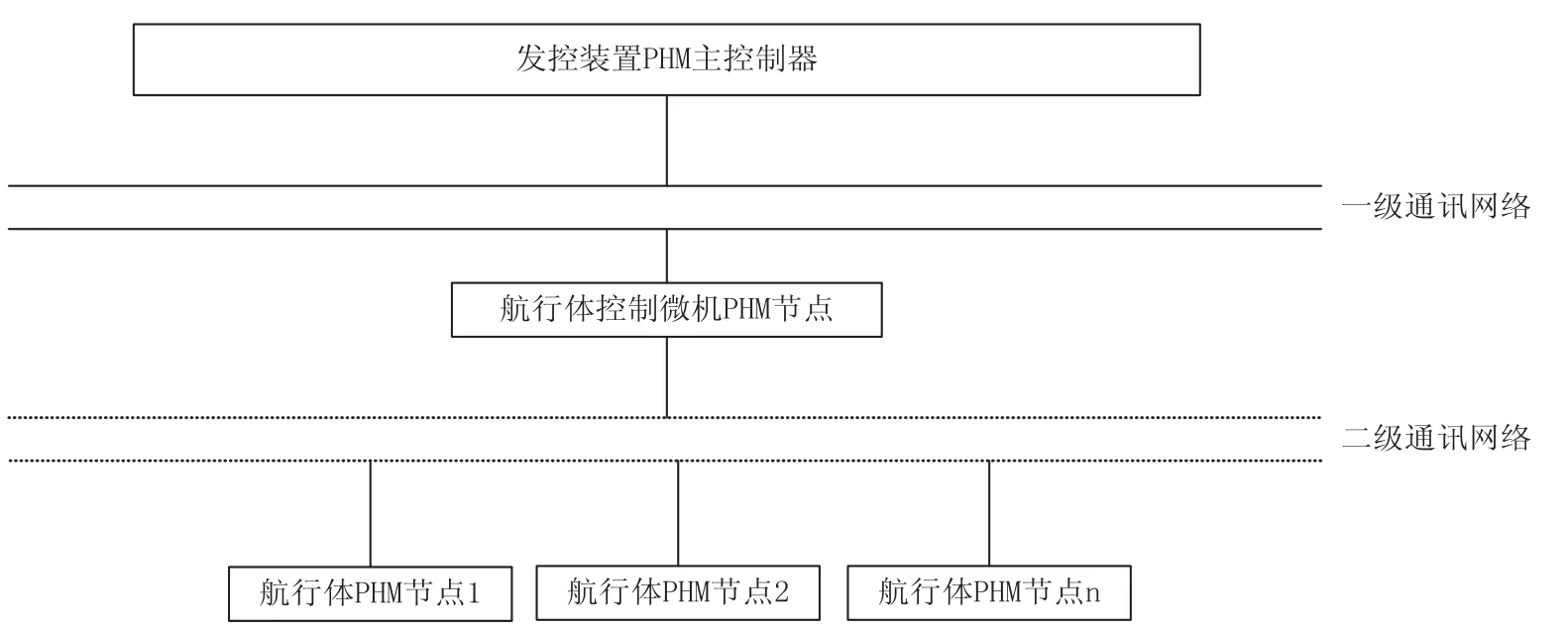
图4 发控装置PHM系统结构图
[1]Luis Trevino.Investigation of Integrated Vehicle Health Management Approaches[R].NASA,MARSHALL SPACE FLIGHTCENTER,2004.
[2]Orsagh R F,Brown DW,et al.Prognostic health management for avionic systems[A].Proceedings of the IEEE Aerospace Conference[C].USA,2006:1-7.
[3]冯芳,张兴忠.基于GPS/GPRS/GIS的电力抢修调度指挥系统的研究[J].计算机测量与控制,2013,21(2):527.
[4]求是科技.单片机典型模块设计实例导航[M].北京:人民邮电出版社,2004.
[5]赵俊岩,侯满义.某型飞机挂架综合检测仪设计与实现[J].计算机测量与控制2013,21(3):828.
Design and Im plement of Underwater Vehicle Shipborne Launcher
TIAN Li
(Kunming Shipborne Equipment Research&Test Center,Kunming 65000,China)
The design method of hardware and software of underwater vehicle shipborne launcher,based on Global Position System,is introduced in this paper.It solves problems such as long preheating time of shipborne electric compass and low capability of signal anti-jamming.The Prognostics&Health Management system,applying to underwater vehicle shipborne launcher,is provided to enhance the reliability and themaintainability of equipment.
AUV;Single board computer;GPS;Multithreading;PHM
10.3969/j.issn.1002-2279.2014.06.024
TP311.1
:A
:1002-2279(2014)06-0085-03
田立(1980-),男,甘肃镇原人,工程师,主研方向:水下航行体控制仿真及发控技术的方向的研究。
2014-04-15