静态威胁下的无人机航迹规划❋
2014-08-07刘洲洲潘鲁宁
刘洲洲,潘鲁宁
(1.西安航空学院,西安710077;2.辽宁公安司法管理干部学院,沈阳110161)
静态威胁下的无人机航迹规划❋
刘洲洲1,潘鲁宁2
(1.西安航空学院,西安710077;2.辽宁公安司法管理干部学院,沈阳110161)
无人机(Uninhabited Air Vehicle,UAV)由于其自身优点,已经在军事以及民用领域取得广泛使用。无人机的航迹规划本质可归结为一个多目标多约束条件的最优化问题。简单介绍无人机航迹规划的基本理论。运用神经网络算法针对静态环境下的火力威胁和非火力分别建模。运用遗传算法对无人机进行航迹规划。通过建立不同环境的模型仿真验证算法的优越性。
无人机;航迹规划;神经网络;遗传算法
1 引 言
无人机(Uninhabited Air Vehicle,UAV)由于其用途广泛,零人员伤亡风险,制作成本较低,机动性能好等众多优点,在现代战争甚至民用领域的使用越发广泛。
无人机航迹规划是指在特定的地形条件、敌情限制和燃油约束下,找到从起始点到目标点之间UAV生存概率最大的飞行航线,其本质可归结为一个多目标多约束条件的最优化问题。
文章结合神经网络算法和遗传算法针对静态威胁下的UAV进行航迹规划,通过仿真实验来验证算法的优越性。
2 无人机航迹规划基本理论
航迹规划的关键有三点:航路规划算法、飞行信息、威胁回避。
航迹规划基本步骤为:
(1)划定UAV飞行区域,确定地形条件、目标任务、飞行威胁等信息,并进行仿真建模。
(2)运用航迹规划算法,根据飞行任务结合环境模型以及燃油限制等约束条件规划出UAV最优航迹。
2.1 航迹飞行建模
采用加权因子将多个目标的优化问题转化为单个目标优化问题,目标函数取为最短航迹和最小威胁的加权。描述如下:
其中,xij为0时,表示目标点i到目标点j之间不可行,为1时表示可行;cij为点i与点j之间的距离。
2.2 威胁模型
UAV在飞行过程中主要遭遇威胁的模型如下:

其中,(x,y)为UAV在飞行途中的即时坐标,(xn,yn)为所受威胁的坐标,当UAV飞出威胁范围时,则威胁为0。
3 仿真实验
无人机航迹规划中受到的威胁可以分为非火力威胁和火力威胁两种,在此用不同的神经网络模型来表示这两种威胁。
3.1 非火力威胁模型
非火力威胁是指UAV在飞行过程中受到的无攻击性威胁,比如地形限制,禁飞区等。非火力威胁区域可以用不等式组表示,例如:

表示如图1所示。
非火力模型数学表达式为:

3.2 火力威胁模型
火力威胁是指UAV在飞行过程中受到的类似防空导弹和高射炮等具有主动攻击性的威胁。不同的火力威胁具有不同的有效射程,因此可用不同半径的圆表示,例如:

表示如图2所示。

图1 任务空间中的非火力威胁及其神经网络模型
图2 任务空间中的火力威胁及其神经网络模型
火力模型数学表达式为:
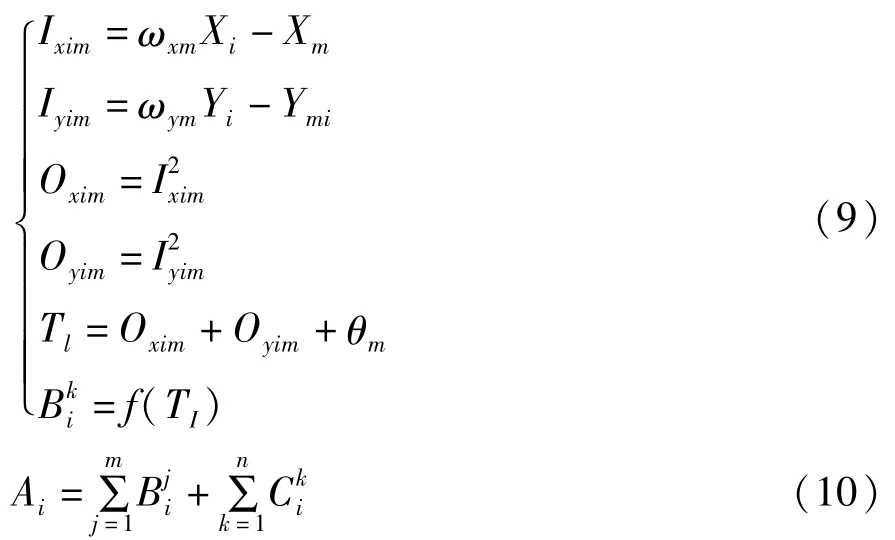
Ai表示UAV所受威胁的加权和,若Ai=0,则表示UAV还未进入威胁区,否则Ai>0。
3.3 静态威胁下的航迹规划
3.3.1 代价函数
UAV的总路径可分为若干段航迹,每个航迹的代价都由燃油代价和威胁代价加权而成:

其中,k取值为0~1,是加权系数。

当pipi+1I tzone=0

3.3.2 仿真流程图
仿真流程如图3所示。
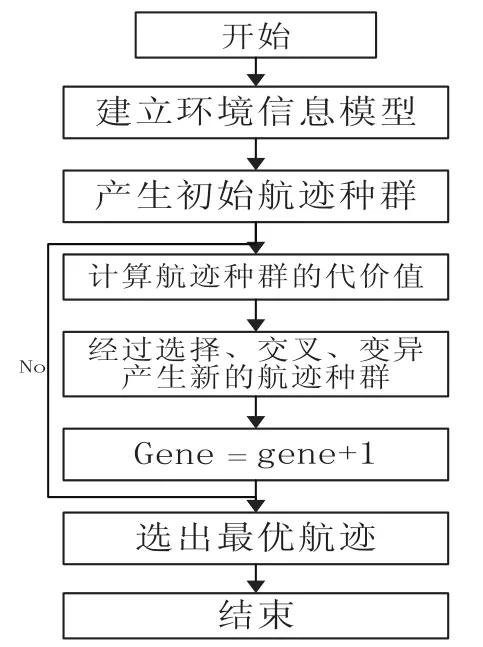
图3 UAV航迹规划流程图
3.3.3 UAV航迹规划仿真
采用遗传算法对UAV路径规划进行仿真,n=100,max gen=100,pc=0.8,pm=0.1,设计两种静态威胁环境,分别进行仿真,其结果如图4所示。
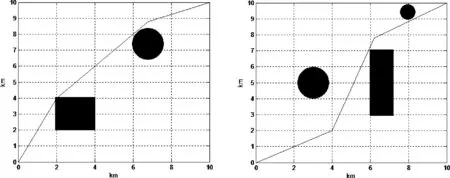
图4 UAV航迹规划仿真图
可以看出,UAV能够以最短路径回避各种威胁,进而验证了该算法的优越性。
4 结束语
研究了UAV航迹规划的基本原理,通过使用神经网络和遗传算法的结合对UAV进行路径规划,用最短最优路径来回避各种威胁,通过仿真验证了算法的优越性。
[1]张延松.基于遗传算法的无人机航迹规划研究[J].中国西部科技,2010,9(11):44-46.ZHANG Yan song.Study on a Path Planning for UAV with Genetic Algorithm[J].Science and Technology of West China,2010,9(11):44-46.
[2]徐剑,周德云,黄鹤.基于改进遗传算法的多无人机路径规划[J].航空计算技术,2009,39(4):43-46.XU Jian,ZHOU De yun,HUANG He.Path Planning of Multiple UAVs Based on a Improved Genetic Algorithm[J].Aeronautical Computing Technique,2009,39(4):43-46.
[3]符小卫,高晓光.一种无人机路径规划算法研究[J].系统仿真学报,2004,16(1):20-21,34.FU Xiao wei,GAO Xiao guang.Study on a Kind of Path Planning Algorithm for UAV[J].JOURNAL OF SYSTEM SIMULATION,2004,16(1):20-21,34.
[4]马云红,周德云.一种无人机路径规划的混沌遗传算法[J].西北工业大学学报,2009,24(4):468-471.Ma Yun hong,ZHOU De yun.A Chaotic Genetic Algorithm(CGA)for Path Planning of UAVs(Unmanned Air Vehicles)[Jl].Journal of Northwestern Polytechnical University,2009,24(4):468-471.
[5]柳长安.无人机航路规划方法研究[D].西安:西北工业大学,2003.
[6]黄献龙,梁斌,吴宏鑫.机器人避碰规划综述[J].航天控制,2002(1):34-46.HUANG Xian long,LIANG Bin,WU Hong xin.A Survey on Robotics Collision Avoidance Planning[J].Aerospace Control,2002(1):34-46.
UAV Path Planning in Static Threats
LIU Zhou-zhou1,PAN Lu-ning2
(1.Xi’an Aeronautical University,Xi’an 710077,China;2.Liaoning Administrator College of Police and Justice,Shenyang 110161,China)
The UAV(Uninhabited Air Vehicle),duing to its advantages,has been widely used in military and civilian fields.The essential of the UAV path planning is optimization formulti-objective and multi-constraint.This article introduces the crucial theory of the UAV path planning.The neural network algorithm is used to setmodels for the fired and non-fired threats in a static environmentand the genetic algorithm is used for UAV path planning.The superiority of the algorithm is verified by simulation of different environmentmodels.
UAV;Path planning;Neural networks;Genetic algorithms
10.3969/j.issn.1002-2279.2014.06.016
TP24
:A
:1002-2279(2014)06-0055-03
国家自然科学基金资助项目(61103242)
刘洲洲(1981-),男,山西运城人,博士研究生,讲师,主研方向:无线传感器网络,系统仿真。
2014-08-01