基于数字滤波技术的舵机摩擦力矩在线检测
2014-08-07赵志强
刘 超,何 平,王 猛,赵志强
(哈尔滨工业大学航天学院,哈尔滨150001)
·微机应用·
基于数字滤波技术的舵机摩擦力矩在线检测
刘 超,何 平,王 猛,赵志强
(哈尔滨工业大学航天学院,哈尔滨150001)
随着我国航天战略发展计划,现代航天技术正向高技术、高挑战、高精度等方向发展。为了实现舵机参数摩擦力矩的在线检测,设计了一种以TMS320F2812为主控芯片的基于数字滤波技术的舵机摩擦力矩在线检测系统。首先,介绍了摩擦力矩的检测方案,然后,对系统的总体结构进行了设计,最后进行了主控系统的软件设计以及测量结果的数据处理与分析。经实验验证,系统检测舵机摩擦力矩参数时具有效率高、精度高、抗干扰性强等特点,具有较高的使用价值。
摩擦力矩;在线检测;TMS320F2812;数字滤波
1 引 言
舵机又名控制舵面的伺服电机,是航天器在姿态控制时的核心执行机构,通过连杆和齿轮等带动舵面转动,控制飞行器的运动姿态。随着现代航天技术的不断发展,如何保证航天系统的可靠性、安全性已经成为现今不可回避的话题,是现今航天领域的重要课题[1]。
舵机传动机构的各项性能指标直接关系舵机的稳定性,其中舵机传动机构的摩擦力矩对舵机的整体性能有重大影响。从静态方面看,它相当于死区的影响,会增加稳态误差,从而降低系统的精度;从动态方面讲,其主要影响是造成系统低速运动时的平稳性,换向过程中的延时[2]。准确测量舵机传动机构的摩擦力矩为改进舵机设计参数和加工工艺提供了科学依据,由于系统对测量精度的要求很高,在数据处理过程中要采用大量的软件滤波算法,因此系统采用高性能处理器TMS320F2812作为主控芯片,提高数据处理效率,实现对舵机摩擦力矩的实时检测。
2 摩擦力矩检测原理
作用在两个有相互运动或者相互运动趋势的物体之间的力称为摩擦力。当物体的两运动副元素之间产生相对转动,发生在两运动副元素间阻碍其相对转动的力矩称为摩擦力矩[3]。
如图1所示,当传动机构的转速为0时,传动机构的摩擦力矩表现为静摩擦力矩,其摩擦力矩大小与施加在该传动机构上的力矩大小相等,方向相反。随着施加在传动机构上的力矩值逐渐增大,传动机构上的摩擦力矩也相应增大,当达到静摩擦力矩最大值后,传动机构开始转动,传动机构进入滑动摩擦力矩作用阶段。传动机构开始转动时,由于液体润滑作用,动摩擦力矩随转速增加而减小,从而直至接触面完全润滑[4]。由于测试条件限制(例如机电部分在机械装配中的误差、扭矩传感器、角度传感器动态测量中误差和滞后),在传感器数据采集完成后进行信号处理,对原始数据进行数据滤波、曲线拟合,使绘制的实际实验曲线更接近理论曲线,同时使观测值更为清晰、准确、可靠。
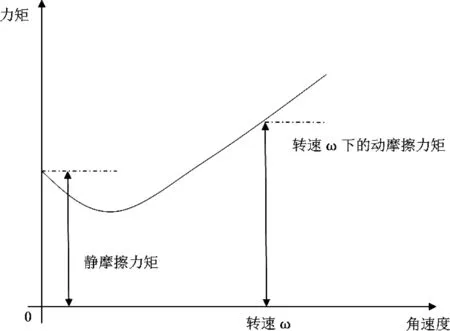
图1 传动机构的静动摩擦力矩曲线
3 系统总体设计
舵机摩擦力矩在线检测系统主要由三部分组成,分别为上位机部分、下位机部分和机电系统部分,如图2所示。
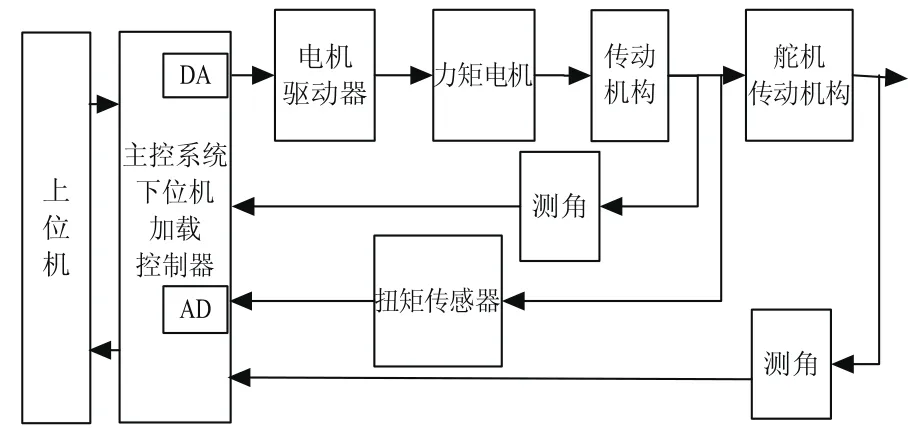
图2 摩擦力矩检测系统原理框图
主控系统的主控芯片选用高速、高性能的数字信号处理芯片TMS320F2812。为了使主控芯片安全、可靠地工作,还设有基本外围模块,提供主控芯片的工作条件[5]。
在进行舵机摩擦力矩参数测量时,舵机参数测试系统的主控系统通过控制力矩电机进行力矩加载,同时采集各传感器的测量数据,包括扭矩传感器和测角传感器,将数据反馈至主控系统进行控制量的处理与校正,使舵机传动机构按照预定的控制算法进行运动。另外,测试系统对采集到的数据进行滤波、拟合等进一步处理后,求得摩擦力矩的待测参数。
4 待测数据的采集与处理
4.1 摩擦力矩参数测量
舵机传动机构摩擦力矩的测量分为静摩擦力矩的测量和动摩擦力矩的测量。进行静摩擦力矩测量时,首先控制加载力矩电机产生一定小量的力矩使舵机沿顺时针转动一小段位移后缓慢停止,以创造静摩擦力产生的条件。然后控制力矩电机在舵机传动机构的输入轴加载由零开始的级梯递增的顺时针力矩直至舵机输出轴产生转动,其过程中系统实时采集扭矩传感器的输出值并进行AD转换、滤波、补偿等处理,通过上位机绘制静摩擦力矩特性曲线分析计算得出传动机构的静摩擦力矩特性。
该段位移运行完成后,开始测量舵机传动机构的动摩擦力矩。首先,施加正向力矩控制舵机传动机构进行匀速转动。逐步减小力矩,使传动机构以不同梯级的速度作正向匀速转动直至停止,记录下各力矩,最后得到摩擦力矩特性曲线。正向动摩擦力测试完成后,反向动摩擦力的测试过程同理。摩擦力矩测试流程图如图3所示。
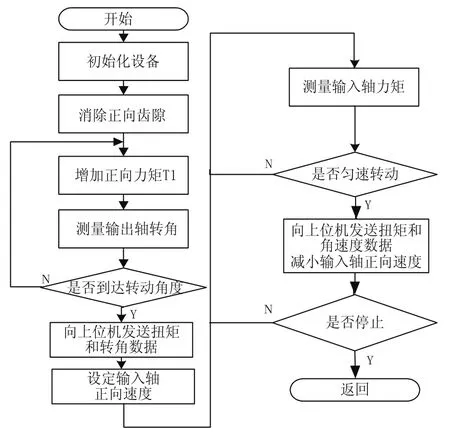
图3 摩擦力矩测量流程图
4.2 测量结果的数据处理与分析
舵机摩擦力矩参数在线检测系统按照上述待测参数测试过程对舵机传动机构进行待测参数摩擦力矩的测试。测试过程所反馈的各传感器参数运用LABVIEW可视化编程软件及其曲线拟合模块进行滤波、拟合等处理,并绘制相应的测试结果曲线。
滤波技术可以有效降低干扰、防止噪声。通过对实验采集得到的信号进行滤波处理,实现对混入有用信号中的噪声和干扰的有效滤除。滤波技术分为模拟滤波技术和数字滤波技术,而数字软件滤波技术相较于模拟滤波技术有着极大的优势[6]。由于系统测量的数据量较大,因此在测试数据处理、校正中,系统采用中值滤波的方法,用以克服参数测量时因偶然因素引起的波动干扰,对原始测量数据进行初步处理。
4.2.1 滤波算法的实现
中值滤波技术运用排序统计理论对信号进行滤波处理,它能有效抑制测试过程中的干扰、噪声,被越来越多地应用于图像数据处理等领域。
取奇数n个数,将其按数值的从小到大顺序排列,处于最中间位置的数即为此序列的代表值;当n为偶数时,把最中间两数的平均值设为中值,不管n为奇数或是偶数,中值滤波器的定义差别不大。
对一系列采样信号数据进行中值滤波时,通常取中值滤波器的移动窗口的长度为奇数,对移动窗口中的所有观测值按其数值按从小到大顺序进行排列,最后将最中间位置的观测值作为该窗口中值滤波后的输出数值。另外,需要注意的是,对于有限长序列,在中值滤波前需要将输入信号进行扩展,使整个输出信号的长度与输入信号的长度相等[7]。
滤波完成之后,对所得的实验数据进行曲线拟合,实现用拟合曲线的函数解析式来反映待测变量间的关系,曲线拟合的方法被广泛应用于图像处理、计算机辅助设计及实验数据的处理和分析等领域,使系统测试结果更清晰可靠[8]。
4.2.2 测量结果分析
检测系统对舵机传动机构进行了静摩擦力矩和动摩擦力矩参数的测试,以舵机传动机构输出轴角速度为横坐标,输入轴角速度为纵坐标,其摩擦力矩测量原始图如图4所示。
由图4可以看出,通过输出轴传感器和输入轴传感器采集到的数据存在干扰和噪声,因此原始的摩擦力矩测量并不理想。需要通过数据滤波、拟合方法对所得的数据进行进一步处理,中值滤波后的测试如图5所示。
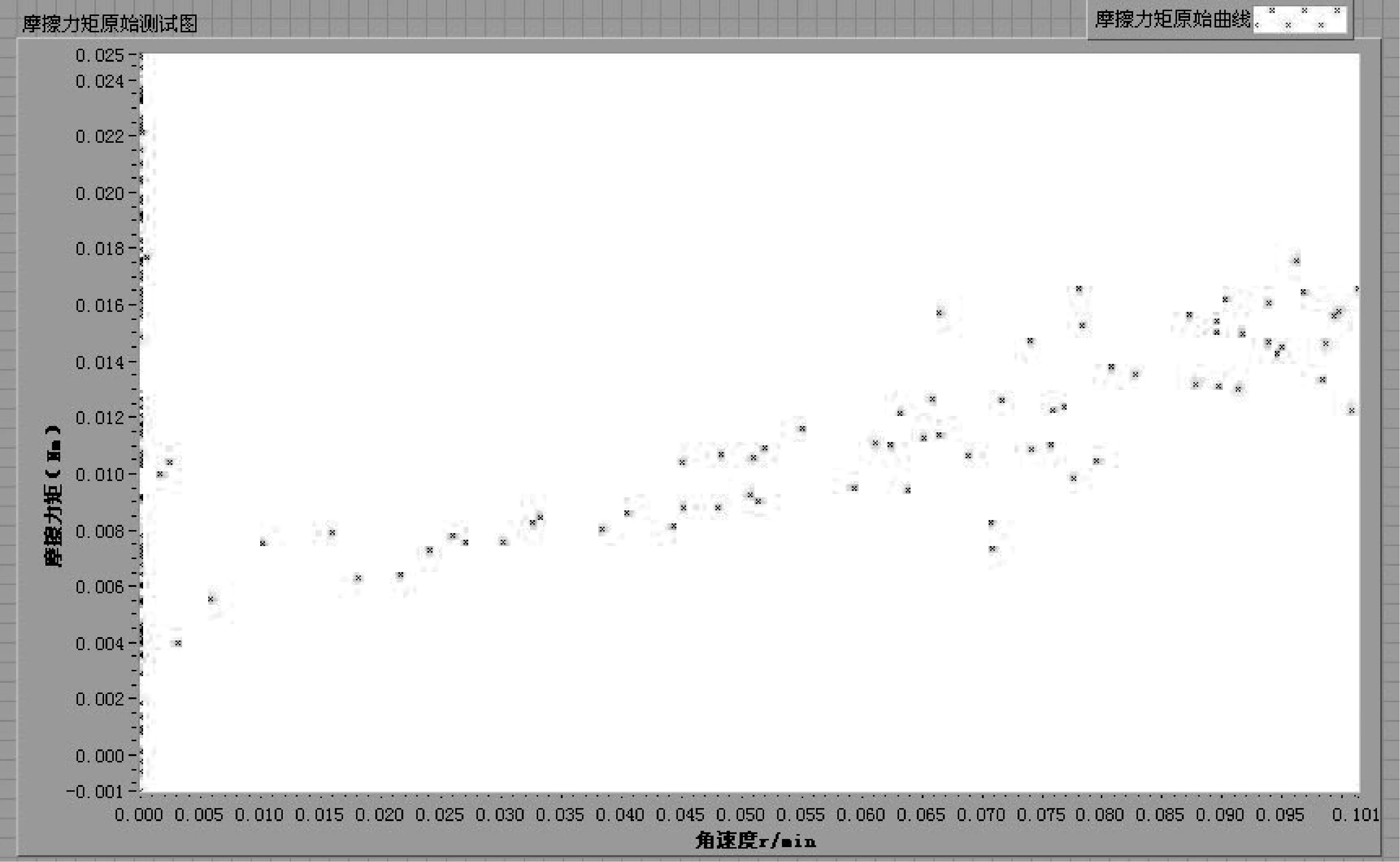
图4 滤波前摩擦力矩原始图

图5 滤波后摩擦力矩测试图
由图5可以看出,经过对原始输出轴角度数据和力矩数据进行数字滤波处理,摩擦力矩测试图滤除了大部分摩擦力矩测试过程中的噪声和干扰,取得了很好的滤波效果。为了让曲线连续光滑,方便后续研究,加入曲线拟合技术对滤波后的摩擦力矩侧视图进行拟合,得到摩擦力矩变化曲线,使得测试结果更加清晰,曲线拟合后摩擦力矩测试图如图6所示。
5 结束语
设计的基于数字滤波技术的舵机摩擦力矩在线检测系统,运用DSP技术实现了舵机传动机构摩擦力矩的测量。以TMS320F2812为主控芯片,运用数字滤波和曲线拟合技术,对测量结果进行处理与分析。实验结果表明,该系统测试效率高,测试结果误差小,具有很高的实用价值,对航天航空的研究与发展具有非常重要的意义。
[1]于瑞涛.基于嵌入式的微型轴承摩擦力矩测试系统设计[D].上海:上海交通大学,2008:1-15.
[2]蒋明桔,秦现生,沈宏华.舵机传动机构静动摩擦力矩测控系统设计[J].测控技术,2009,28(12):44-47.
[3]冯炳.摩擦力矩的测试方法研究[D].哈尔滨:哈尔滨工业大学,2010:2-20.
[4]许宏,张怡,王凌,等.基于Stribeck摩擦模型的无刷直流电机控制系统设计与仿真[J].控制与应用技术,2011,38(2):26-31.
[5]孙丽明.TMS320F2812原理及其C语言程序开发[M].北京:清华大学出版社,2008.
[6]Ding Xuefang,Zhou Yan.The Application of Discrete Fourier Transform and Inverse Transform in Digital Filter Design[C].Education Technology and Management Engineering,2012:342-346.
[7]严琛.基于脉冲噪声检测的图像去噪研究[D],南京:南京理工大学,2006:12-24.
[8]刘丹.基于三次样条曲线拟合公路平面线形方法研究基于点云数据的曲线拟合[D].阜新:辽宁工程技术大学,2009:10-18.
Detection of Actuator Friction Torque Based on Digital Filtering Techniques
LIU Chao,HE Ping,WANG Meng,ZHAO Zhi-qiang
(School of Astronautics,Harbin Institute of Technology,Harbin 150001,China)
Modern space technology is moving toward the direction of high technology,high challenge and high precision with the development of the national aerospace strategic plan.In order to measure the friction torque of the actuator,the project designs on-line detection system based on digital filter and curve fitting technology.The system uses TMS320F2812 as the control core.Firstly,the program of friction torque detection is described.Then,the overall structure of the test system is designed.Finally,the software algorithm of the control system and the processing system for friction torque of the actuator are designed.With the experimental verification,when testing the friction torque of the actuator,the system has the performance of high efficiency,high precision and strong resistance to interfere and it has a high value in use.
Friction torque;On-line detection;TMS320F2812;Digital filter
10.3969/j.issn.1002-2279.2014.05.016
TP274
:A
:1002-2279(2014)05-0056-03
刘超(1989-),男,河北任丘市人,硕士研究生,主研方向:工业过程检测与控制、检测技术与自动化装置。
2014-01-16
