改进人工势场法在机器人路径规划中的应用
2014-08-07李炳德
李炳德,张 莉
(西安工程大学电子信息学院,西安710048)
改进人工势场法在机器人路径规划中的应用
李炳德,张 莉
(西安工程大学电子信息学院,西安710048)
针对传统人工势场法中存在的一些局部极小点问题,提出了一种基于偏转角度的改进人工势场法。针对在传统的人工势场法中,障碍物在目标点附近使得机器人不能到达目标点问题,通过加入机器人与目标点之间距离参数的方法,使得移动机器人顺利到达指定目标点。对于机器人在行进过程中,产生局部极小点问题,即出现合力为零的时候,在机器人因受斥力和引力的作用下沿正常角度行驶时给其加入一个偏转角度,有效解决了路径规划失败的问题,规划出一条平滑无碰撞路径。通过仿真实验,可以验证算法改进的有效性。
机器人;路径规划;人工势场法;偏转角度
1 引 言
路径规划是机器人研究领域的重要分支,它是指移动机器人按照某一性能指标要求搜索一条从起始状态到目标状态最优或次优路径的过程。目前根据机器人路径规划方法的不同,可以将其分为两类:传统路径规划方法和人工智能路径规划方法。传统的路径规划方法主要有:可视图法、栅格法、自由空间法、人工势场法等。智能路径规划方法主要有:专家系统[1]、神经网络法、模糊算法、遗传算法和一些仿生学算法[2]。
人工势场法是由Khatib等提出的一种虚拟方法,他把移动机器人在环境中的运动视为在一种抽象的人造受力场中的运动:目标点对移动机器人产生引力,障碍物对移动机器人产生斥力,最后根据合力来确定机器人的运动。
在传统人工势场法的路径规划过程中,当障碍物处在机器人和目标点之间,机器人受到目标点的引力和障碍物的斥力,可能出现合力为零的状态,即存在局部最优解,使移动机器人在到达目标点之前就停留在局部最小点,找不到路径到达目标点。当机器人向斥力势能减少和引力势能增加的方向躲避障碍物向目标点移动,并且目标点离障碍物距离较近时,斥力越来越大,有可能出现引力势能小于斥力势能的情况,使得机器人不能到达目标点,使其陷入局部极小状态[13]。
针对以上问题,提出了一种改进的人工势场法。当障碍物在目标点附近,使机器人不能到达目标点时,提出在斥力场函数中引入机器人和目标点距离,即距离参数,使得机器人在目标点的时候,全局势能为零。当障碍物在机器人和目标点之间,使得机器人受到的合力为零,从而停滞不前时,提出给机器人加一个偏转角度,使得其绕开障碍物继续向目标点前进。
2 传统的人工势场法模型
2.1 人工势场路径规划法
人工势场法最初在1986年由Khatib[4-5]提出,起初是应用于机械手抓取物体和移动机器人导航,具有简单新颖的特点。其基本思想是仿照物理学中电场力和电势的概念,把机器人运动视为一种在虚拟人造力场中的运动,以目标位置为中心构造方向指向目标的引力势场,其大小随机器人与目标之间距离的增加而单调递增,用表示;在障碍物周围构造斥力势场,并给其一个斥力影响范围。当机器人处在障碍物处的影响范围时受到斥力作用,并随机器人与障碍物之间距离的增大而单调递减,用表示;所以形成由斥力和引力势场共同作用的复合人工势场,用表示。机器人在运动空间中某一点时在势场作用下所受的力是的负梯度,如下式:
而在整个区域内的引力势场被定义为:
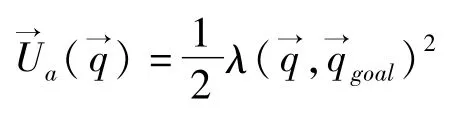

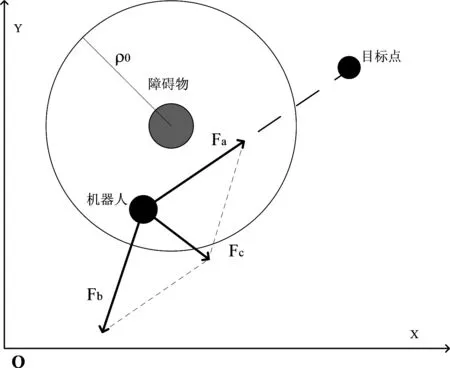
图1 传统人工势场法受力分析
该力随机器人趋近目标而逐渐趋近于零。一个经常被使用的斥力场公式如下:

2.2 局部问题
传统的人工势场法被广泛应用,因为其原理简单,容易上手,在一般的机器人路径中能规划出来一条比较平滑且安全的路径,但是通过广泛使用和大量的实验跟踪发现,该产生其固有缺陷——局部极小点问题。所谓局部极小点是指空间内的某些区域由于受多个势函数的作用造成了斥力与引力的平衡点,使得机器人不能到达目标点[6]。主要有两方面问题。
(1)目标不可达问题
当目标点在障碍物的影响范围之内时,障碍物斥力快速增强,引力减小,在两者相等时机器人停在目标前某一点使路径规划失败。
(2)局部极小点问题
机器人未到达目标点时,多个障碍物形成的斥力和目标点引力的合力为零,此时斥力与引力大小相等,机器人停在障碍物前某一点,使其不能到达目标点,路径规划失败。
3 改进人工势场法的实现
3.1 目标不可达问题的解决
目标不可达问题存在的主要原因是:当目标在障碍物的影响范围之内时,整个势场的全局最小点并不是目标点。因为,当机器人向目标逼近时,障碍物的势场快速增加,使机器人偏离目标点移动。该问题存在的根本原因是目标点并不是整个势场的全局最小点,针对该问题,对斥力势场函数实施改进。通过引入目标与机器人的相对距离,将原有斥力势场函数乘以一个距离参数(X-Xgo)n,使机器人在目标位置处合力为零,那么目标点将仍然是整个势场的全局最小点[6]。为此,保留目标点的引力场函数不变,修正障碍物的斥力场函数为:

式中:krep为斥力势场正比例增益系数;ρ(X)为机器人在空间位置与障碍物的最短距离;ρ0为单个障碍物的最大影响距离,是预先设定好的,主要取决于机器人的运动速度和减速能力。当机器人与障碍物的距离大于ρ0时斥力势场对机器人的运动不再有影响,其中n是一个大于零的任意实数。
(X-Xgo)n=|(x-xgo)n|+|(y-ygo)n|为机器人与目标间的相对距离,与传统人工势场斥力函数相比,引入了机器人与目标间的相对距离,从而保证了整个势场仅在目标点全局最小。则斥力为斥力势函数的负梯度
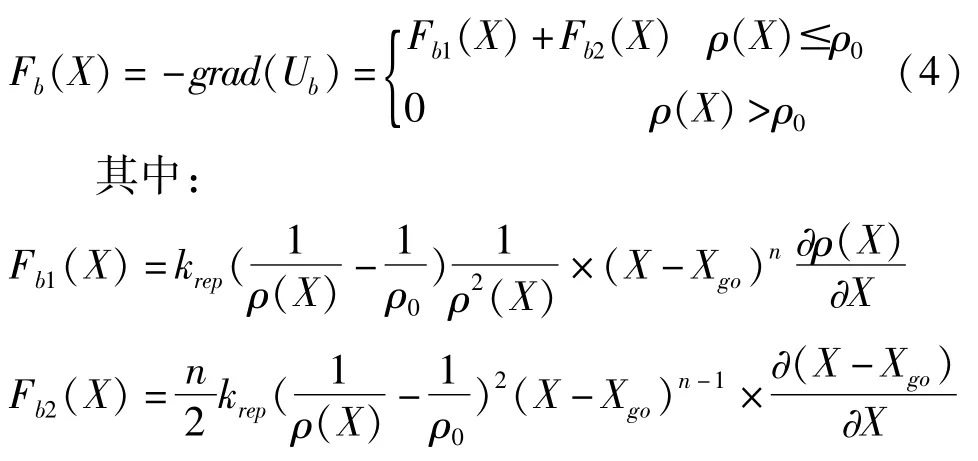
式中Fb1(X)和Fb2(X)为Fb(X)的2个分力。这样,在机器人到达目标点之前,不可能出现合力为零的情况,从而解决了目标与障碍物距离过近导致目标不可达的问题。

图2 引入距离参数后机器人的受力情况
将斥力Fb(X)分解为Fb1(X)和Fb2(X),Fb2(X)的方向为从机器人指向目标点,对于机器人、目标点、障碍物在同一直线且障碍物不在中间时,定义Fb1(X)与Fb2(X)同向,而对于上述两种情况将Fb1(X)的方向定义为与障碍物的影响范围相切,且与引力向量的内积大于等于零,即与引力的方向不大于90度,如图2所示。这样,在机器人到达目标之前,不可能出现合力为零的情况,从而能够完全避免陷入局部极小点的问题[7]。
3.2 局部极小值问题的解决
当移动机器人搜索路径时,会出现特殊问题,陷入局部极小值点,产生锁死现象[8]。在机器人的行进空间中,分布一个或多个障碍物,当其在某一点时,目标点对机器人产生的引力与机器人受到多个障碍物的斥力大小相等方向相反,此时机器人所受到的势场合力,停滞不前,陷入局部极小值点,从而导致路径规划失败。
采用了一种偏转角度的方法来解决机器人陷入局部极小值点的问题。此时,在机器人因受斥力和引力的作用下沿正常角度行驶时给其加入一个偏转角度,此偏角度主要是给机器人重新定义一个运动方向,使其偏离原来的陷入局部极小点的运动方向,具体做法是沿着目标点与机器人当前位置连线的方向顺时针或者逆时针偏转一个0~π/2的角度,其中k的取值为0~1,是一个逐渐增加的实数,因为在0~π/2的角度下偏转,能规划出一条相对较优的路径,之后将偏转kπ/2角度后的方向作为机器人下一步移动的方向。在k值不断从小到大变化中,机器人对应逐步搜索,判断其受到的合力,如果机器人转动一个角度后判断其合力不为零,那么就能使其走出局部极小点,机器人就会在势场合力的作用下继续搜索到达目标的路径;如果判断其合力还为零,那么它没有走出局部极小点,则继续随着k的变化增大偏转角度,此时它的偏转方向也较大,直到逃离局部极小值点。在机器人行进过程中,步长l保持不变,使其搜寻的路径没有断点,即一直采用初始化步长。上述改进的算法路径规划流程如图3所示。
4 仿真
为了验证改进的人工势场法的有效性,在MATLAB2008a下进行仿真实验。
(1)针对机器人不能到达目标点问题进行仿真。在该仿真实验环境中,区域空间是10×10的二维空间,空间有6个障碍物点,机器人从空间区域的左下角(0,0)点为起始位置点,(10,10)为目标位置点,取实验参数k=30,m=25,Po=1.2,N=6,T=100,l=0.2,kk=0(其中k为引力需要的增益系数,m为斥力增益系数,T为迭代次数,Po为障碍物的影响距离,N为障碍物个数,l为机器人步长,kk为偏移角度系数的初始值)。
图4和图5是针对机器人不能到达目标点问题,传统人工势场法和引入距离调节因子的改进人工势场法的仿真图。可以看出,在传统的人工势场法基础上加入距离参数后,机器人能准确地到达目标点,路径轨迹也较平滑。

图3 改进人工势场法的算法流程
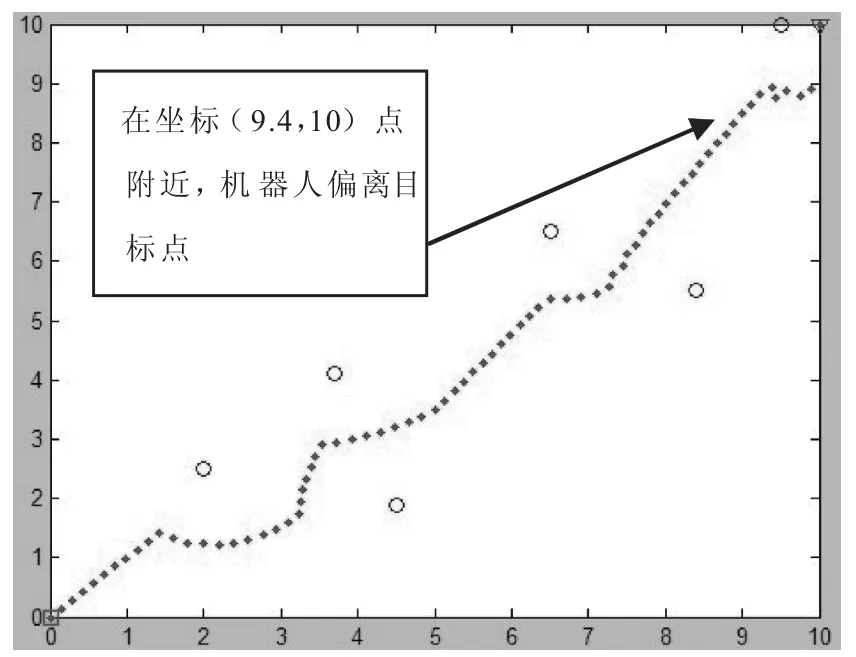
图4 加入距离参数前
(2)针对机器人合力为零时的局部极小点进行仿真。在该仿真实验环境中,区域空间也是10×10的二维空间,空间有10个障碍物点,机器人从空间区域的左下角(0,0)点为起始位置点,(10,10)为目标位置点,取实验参数k=30,m=25,Po=1.2,T=100,N=10,l=0.2,kk=0。

图5 加入距离参数后
图6和图7分别是针对机器人在合力为零的局部极小点问题,传统人工势场法和基于偏移角度的改进人工势场法的仿真图。可以看出,在机器人行进过程中出现的合力为零的局部极小点,致使机器人停滞不前,通过引入偏移角度可以使机器人顺利避开障碍物到达目标点。
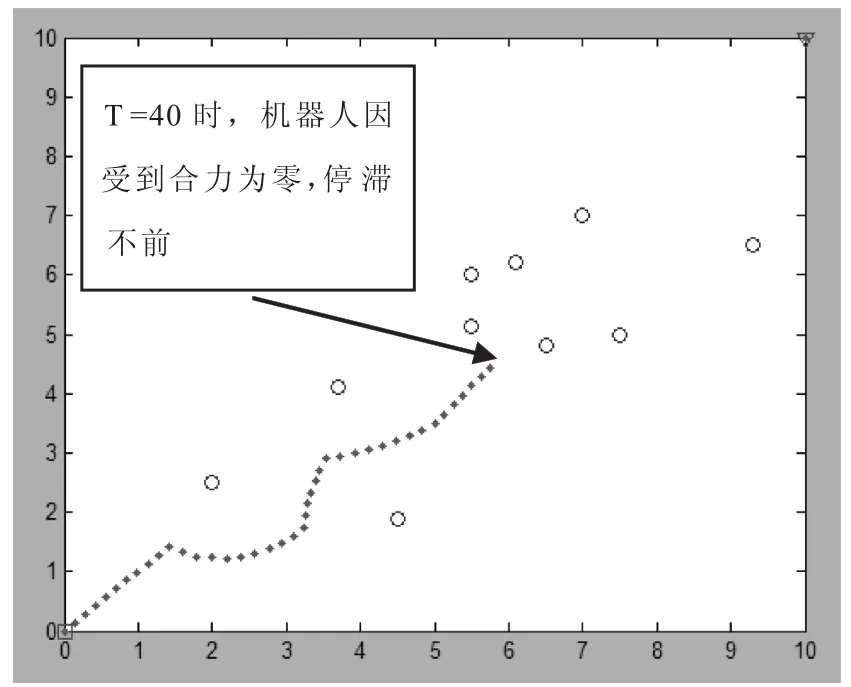
图6 局部极小点合力为零时机器人路径
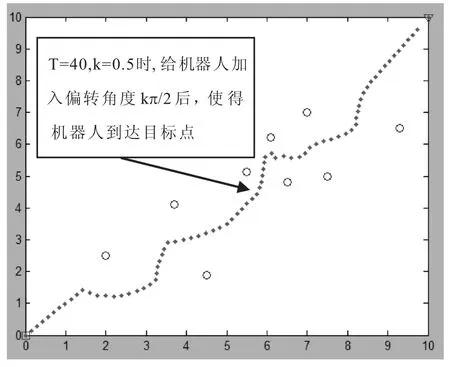
图7 合力为零时,引入偏移角度后的机器人路径
5 结束语
人工势场法是一种非常有效的静态路径规划方法[9],但在动态和多障碍物环境下存在很多问题。本文对传统的人工势场法做了详细分析,并对所遇到的目标不可达和局部极小值点问题进行了改进。对于障碍物在目标点附近而引起的机器人受到斥力势场和引力势场同时增大而出现的目标不可达问题,采用在传统应用的斥力势场函数中增加一个机器人与目标点相对距离参数的方法,使得机器人能准确到达目标点。针对运动空间中出现多个障碍物,使得机器人受到的合力为零从而陷入局部极小值点的情况,采用了给机器人增加一个偏转角度的方法,使机器人逃离局部极小点,能避开障碍物迅速向目标点移动,解决了机器不能找到路径的问题,节省了规划时间。以上仿真结果表明了方法的有效性。
[1]周宏.人工智能技术在足球机器人中的应用[J].考试周刊,2013(3):130-131.
[2]周金良,黄彦文,曹其新.对抗环境下足球机器人路径规划[J].上海交通大学学报,2006,11(11):1828-1831.
[3]田丽平.基于Robocup足球机器人路径规划与轨迹跟踪的研究[D].沈阳:东北大学,2009.
[4]KHATIB O.Real-time obstacle avoidance formanipulators and mobile robots[J].Inter.J.Robotics Research,1986,5(1):90-98.
[5]M B Metea.Planning for intelligence autonomous land vehi-cles using hierarchical terrain representation[A].In:Proc of IEEE Int Conf on Robotics and Automation[C].1987:1947-1952.
[6]刘涛,李海滨,段志信.基于人工力场的移动机器人路径规划研究[J].计算机仿真,2007,(11):144-146,197.
[7]卢恩超,张邓斓,宁雅男,等.改进人工势场法的机器人路径规划[J].西北大学学报(自然科学版),2012,42(5):735-738.
[8]刘洲洲.基于改进人工势场法的智能无人车路径规划仿真研究[J].计算技术与自动化,2013,32(2):133-136.
[9]张建英,刘暾.基于人工势场法的移动机器人最优路径规划[J].航空学报,2007(S1):184-188.
Application of Robot Path Planning Based on Artificial Potential Field Method
LIBing-de,ZHANG Li
(The Electronic Information Academy,Xi’an Polytechnic University,Xi’an 710048,China)
The paper presents an artificial potential field method based on angular deflection to overcome localminimum problem in traditional artificial potential field.Because the issue that themobile robot can not reach the goal in the traditional artificial potential field method,the paper presents a new repulsive potential function considering the relative distance between the robot and the goal tomake robot reach the goal.As for localminimum problem when resultant force is zero,the paper presents angular deflection to overcome the failure of path planning,at the same time,the robot are successfully planning a smooth path without collision.The simulation results prove the effectiveness of thismethod.
Robot;Path planning;Artificial potential field;Angular deflection
10.3969/j.issn.1002-2279.2014.05.015
TP242
:A
:1002-2279(2014)05-0051-05
李炳德(1989-),男,陕西榆林人,硕士研究生,主研方向:嵌入式与系统仿真。
2014-03-21
