基于GNSS的农机自动导航控制系统设计
2014-08-02周志峰王永泉
陈 康 周志峰 王永泉 陈 宁
(1.上海工程技术大学机械工程学院,上海 201600;2.上海司南卫星导航技术有限公司,上海 201100)
在国外,农机自动导航控制系统研究较早,如Qiu H和Zhang Q设计了由液压泵、比例换向阀及转向控制器等组成的拖拉机电液操控系统[1];美国天宝公司的Autopilot用GPS和GLONASS双卫星定位,控制农机的转向液压系统,驱使农机自动行驶;日本拓普康公司的System350使用GPS、GLONASS和Galileo多星一体化接收机并带惯导传感器。在国内,谢斌等基于ISO11783提出了一种CAN总线和GPS的分布式控制系统[2];何卿等采用带非线性补偿的PID控制器设计了双层控制器接触式导航控制系统[3];白晓鸽等设计了一种基于神经网络的拖拉机自动导航系统[4];纪朝凤等开发了基于CAN总线的农业车辆自动导航控制系统[5];胡炼等设计了一种基于CAN总线的分布式控制系统[6];张智刚等在久保田插秧机上开发了基于DGPS和电子罗盘的导航控制系统[7]。由于目前国内外所有的自动导航控制系统均不支持北斗导航卫星系统,因此笔者设计了一款支持北斗导航卫星的农机自动导航控制系统。
1 控制系统硬件设计①
笔者设计的农机自动导航控制系统结构如图1所示。全球导航卫星系统(GNSS)基准站调制并发射无线电信号,安装在农机顶部的GNSS接收机接收GPS、BDS和GLONASS卫星信号,驾驶室壁上的电台解调无线电信号,工控机处理接收机和电台接收的信号并发送转向控制信号给转向执行机构,该工控机固定于座位底部,使用触摸屏设置农机参数和行进路线,在农机原油路系统的基础上改造并增加电控比例液压阀,在左前轮轴上安装角度传感器,实时采集前轮动向回馈给工控机。

图1 农机自动导航控制系统结构框图
1.1 基准站和接收机
三星定位,即接收机能接收到GPS、BDS和GLONASS的卫星信号,保证在每一接收点至少可接收到9~12颗卫星的信号,通过复杂的运算得到高精度的位置坐标。基准站指用作固定参考站的仪器,作业时基准站将已知的精密坐标和接收到的卫星信息直接或经过处理后实时发送给流动站接收机,即农机顶部的接收机,流动站接收机在进行GNSS观测的同时,也接收到基准站的信息,通过对结果进行改正来提高定位精度。
接收机的OEM主板采用上海司南卫星导航技术有限公司的支持BDS(北斗导航卫星)、GPS和GLONASS的三星八频低功耗K508 GNSS OEM主板,该主板采用北斗三频、GPS三频及GLONASS双频进行联合定位,具有超远距离、超快速的高动态RTK解算引擎,且可获得分米级定位精度,作业距离可达300km,可直接输出PJK平面坐标、高精简报文。
1.2 工控机
设计中采用速率达720MHz的AM3359处理器、运行全面的Linux Angstrom操作系统和接口丰富的Beagle Bone作为工控机,保证了稳定性和处理大量数据的速度。工控机通过RS232串口接收GNSS接收机和电台的实时信息,通过CAN总线和下位机保持通信,通过RS232串口和LCD触摸屏连接。工控机根据卫星定位的坐标和车轮的转动情况,用双通道PD算法通过判断偏差信号的正负得出转动方向,实时向液压控制阀发送指令,通过控制液压系统油量的流量和流向,控制农机的行驶,确保农机自动导航。工控机组成框图如图2所示。

图2 工控机组成框图
1.3 转向控制
工控机通过处理GNSS接收机、无线电台和前轮转向角传感器实时信息实现智能行为决策,产生转向信息指令,转向控制ECU驱动电控比例液压阀动作,实现转向轮偏转,进而实现转向动作。设计采用模糊自适应PID控制方法[8],首先计算实际航向与目标航向的偏差,然后减去实际的前轮转角,将其作为转向控制ECU的输入,转向控制ECU输出车轮的目标转角。该目标转角和实际转角作为电控比例液压阀的输入,电控比例液压阀控制油缸执行动作,消除转角偏差,从而达到自动导航的目的(图3)。
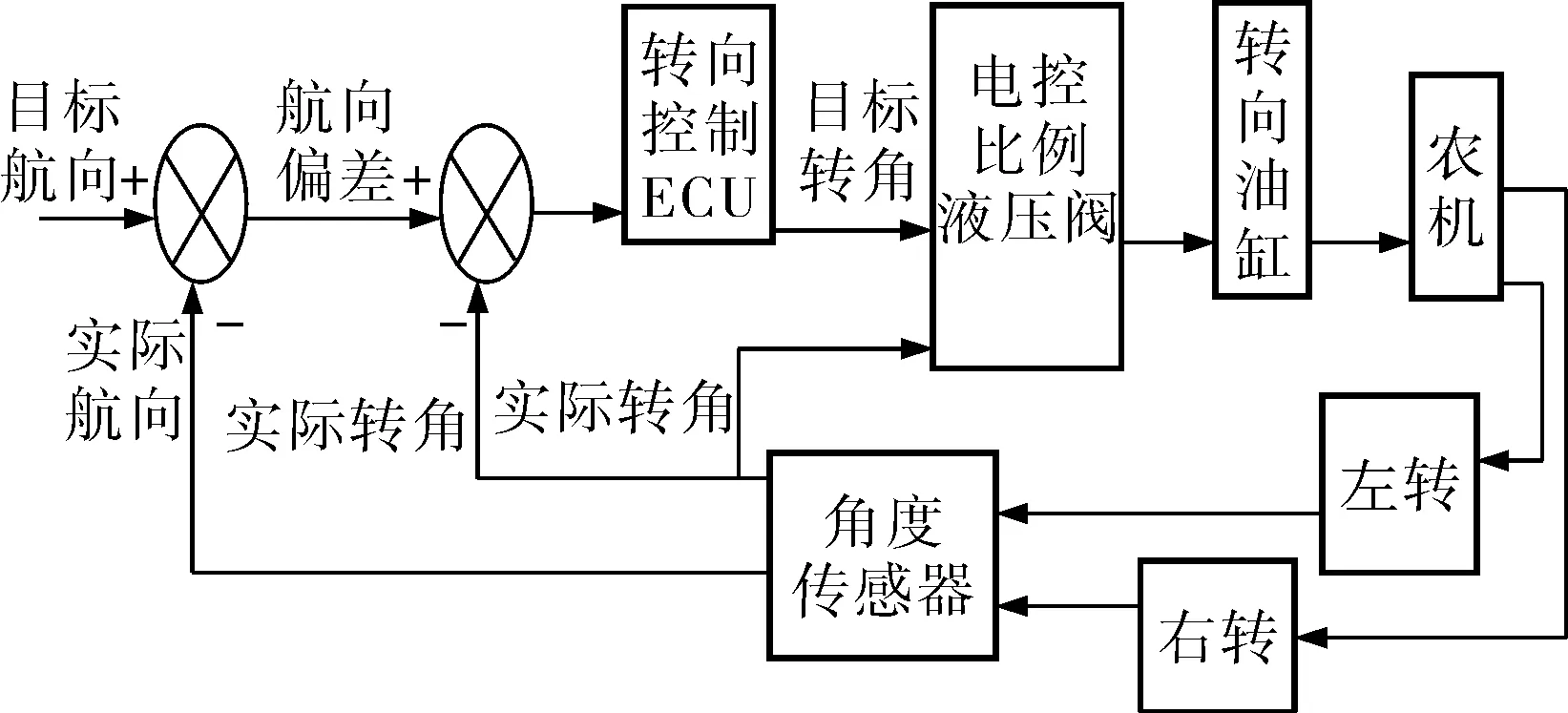
图3 转向控制框图
1.4 切换方向盘
农机遇到突发情况时,需迅速切换到人工驾驶,为此设计一个方向盘,方向盘套(图4)内的压力传感器带有长形皮管,人用在压力管上的压力最大为30N,管的横截面积为300mm2,则最大压力量程为100kPa。笔者选择飞思卡尔传感器(型号MPX5100AP,精度±2.5%,量程100kPa)。当人手握住方向盘时,压力传感器的压力管受到挤压,压力变化,传感器输出信号给工控机,从而实现无人和人工驾驶的迅速切换。
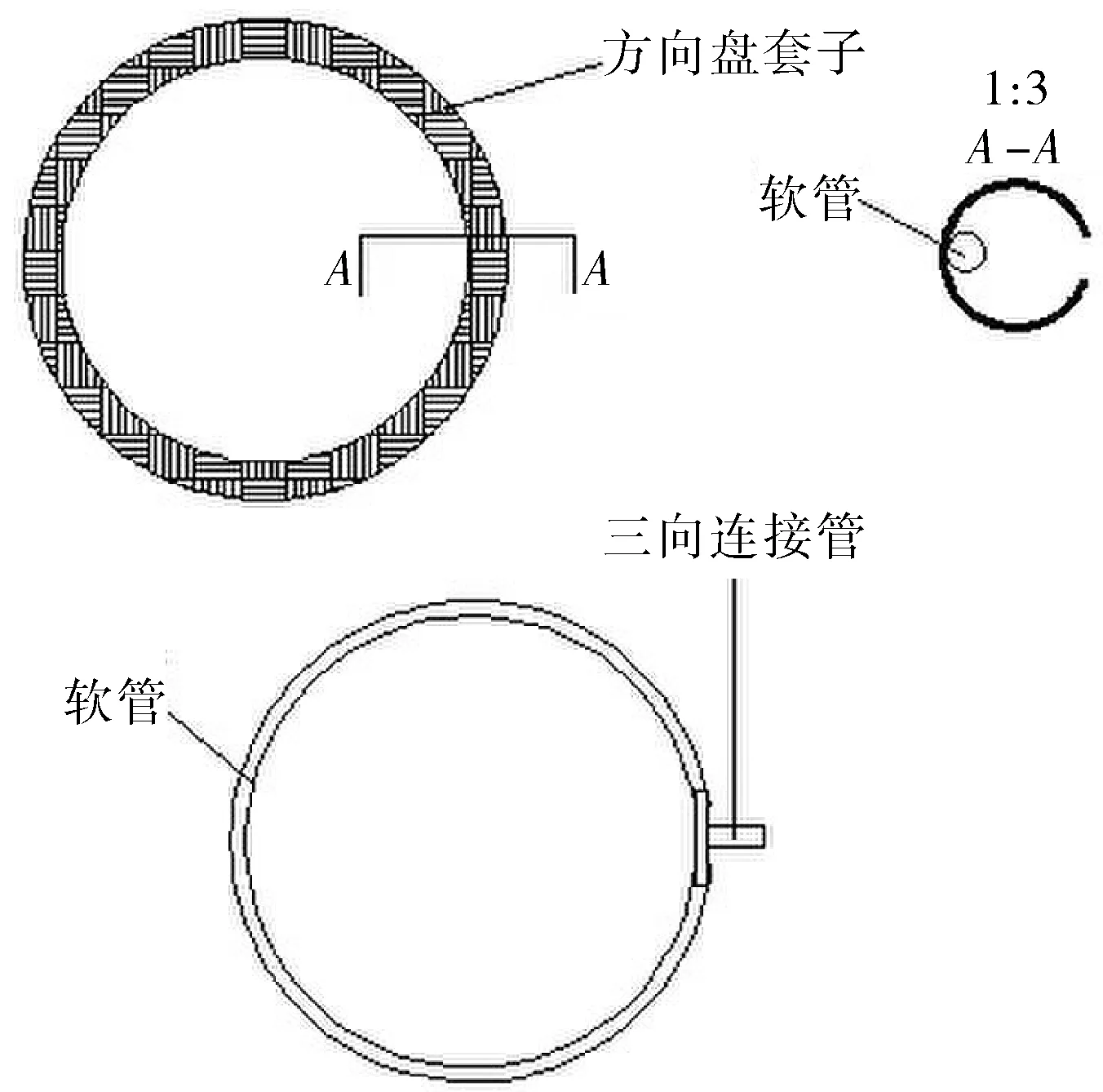
图4 方向盘套子示意图
2 导航算法
本设计采用带定位误差校正的粒子滤波(PF)方法进行数据融合[9],可削弱GNSS跳变引起的误差,且可获得准确的导航定位信息。粒子退化问题在粒子滤波过程中不可避免,因此引入无迹卡尔曼滤波方法(UKF),采用不同重采样方法,且对重要密度函数进行改进,从而有效抑制了粒子退化,又增加(马尔科夫链蒙特卡罗)MCMC步骤,减少了样本枯竭现象。
2.1 定位误差校正
农机在田间作业时,因地面凹凸不平,不可避免地产生俯仰角和横滚角,GNSS天线端与车体中心不重合,使测得的GNSS数据存在误差、定位精度下降,影响了初始状态,导致滤波发散,因此必须加以校正[10]。
首先计算车体在横轴和纵轴方向产生的定位误差:
(1)
(2)
式中H——GNSS天线的距地高度;
θ——俯仰角度,车体纵向中轴线与地平面的夹角;
ϑ——横滚角度,车体横向轴线与地平面的夹角。
(3)
(4)
式中φ——航向角度,车体纵向前进方向与高斯平面坐标系横轴之间的夹角。
使用该定位误差即可对GPS原始定位数据进行倾斜校正。
2.2 PF-UKF-MCMC方法

(5)
状态更新的表达式为:
(9)
(10)
式中pk——协方差;


3 试验测试
为检测所设计的农机自动导航控制系统的精度,在江苏省盐城市大丰县四岔河农场,将设计的系统安装到New Holland T1554农机上,然后预定好行走的直线和曲线路线,设置农机速度为1m/s进行试验。GNSS接收机记录农机行走实时位置的经度、纬度数据后,对数据进行高斯坐标转换处理,绘制实际跟踪轨迹。进行多次试验,对导航系统进行评价和分析。
直线行走时跟踪结果如图5所示,最大横向偏差16cm,平均横向偏差小于8cm。

图5 一次直线行走的跟踪结果
曲线行走时跟踪结果如图6所示,最大横向偏差31cm,平均横向偏差小于14cm。
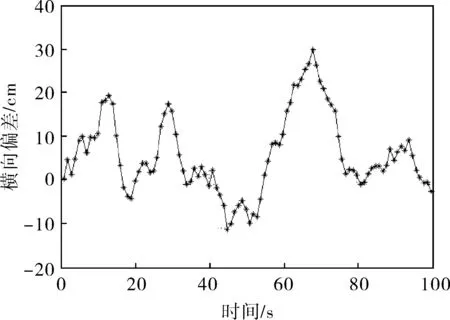
图6 一次曲线行走的跟踪结果
试验结果表明,安装该自动导航控制系统的农机能够满足农田作业要求。
4 结论
4.1使用上海司南卫星导航技术有限公司的三星八频GNSS接收机,可以接收GPS、GLONASS和北斗卫星,优化以前接收机收星少、精准度不高及易受障碍物干扰等缺点。
4.2采用带传感器的特制方向盘,有效解决了以前自动导航系统在遇到突发情况时,切回人工驾驶模式有延迟的问题。
4.3采用带定位误差校正的粒子无迹卡尔曼滤波方法,削弱了因田地复杂环境引起的GNSS跳变误差,使导航定位更加准确。
4.4试验表明,农机行进速度1m/s时,该自动导航系统跟踪最大误差小于16cm,且具有良好的控制精度和稳定性。
