基于点云的树木枝干形态参数提取技术1)
2014-08-02高士增张怀清朱中华
高士增 张怀清 刘 闽 朱中华
(中国林业科学研究院资源信息研究所,北京,100091) (湖南攸县林业局黄丰桥林业工作站)
基于点云的树木枝干形态参数提取技术1)
高士增 张怀清 刘 闽 朱中华
(中国林业科学研究院资源信息研究所,北京,100091) (湖南攸县林业局黄丰桥林业工作站)
以三维激光扫描的不同分辨率树木枝干点云数据为数据源,分别使用迭代的凸包算法和三角网生长法提取其不同层次的等值线模型和Delaunay三角网格模型,并使用射线碰撞检测技术提取以上模型的形态参数。通过对比分析表明,当分层数相同时,使用不同分辨率的模型提取的参数精度相差不大,与实际测量数值相比误差在5%以内;而当分辨率一定时,层数越多的模型,其效果越好,提取的参数精度越高。因此,在三维激光扫描仪的使用过程中,可适当降低分辨率以减少扫描时间,而在建模的过程中,通过提高分层数量以此获得较好的模型表现效果。
三维激光扫描技术;Delaunay三角网;参数提取
3D Laser scanning technique; Delaunay triangulation; Morphological parameters extraction
近年来,虚拟现实技术、林业遥感监测、各种类型的激光扫描技术得到了迅猛的发展,高精度的林业测量技术越来越受到林业人员的关注,通过采用新技术,林业测量的精度被不断的提高。其中,地面三维激光扫描技术(TLS)的迅速发展为林分内部或者单株树木调查因子的精确测量提供了一条新的途径[1-3]。与传统的光学成像原理不同,TLS的传感器采用红外和近红外波长,可以快速准确的获得树木表面的点云数据信息,从而可以高效构建树木的三维模型。
目前,此项技术在林业资源调查中已经取得了初步的应用。Wezyk等[4]人提出了手工处理点云数据的方法:像素法和管线法。通过对比发现,使用像素法处理针叶树木的点云数据测量得出的胸径和树高值都可以达到理想的精度。Jakob[5]在综合考虑了环境因素影响、仪器本身的测量误差以及林分中树木的相互遮挡情况下,利用三维激光扫描仪对德国艾伯斯瓦尔德林场内的树木调查因子进行了研究,提出了利用多站式扫描的方式可以获得精准林分蓄积量,实验的估测结果平均偏低4% (13 m3/hm2)。Gabor等[6]在匈牙利也研究了通过处理点云数据构建数字地面模型,快速获取基本树木测量因子的方法。韩光瞬等[7-8]使用三维激光扫描技术测量得出的树木胸径、树高数据与实际测量数据相比,误差都在林业测树允许的范围之内。
本研究通过对单株树木点云数据的处理,分别利用凸包算法和三角网生长算法构建树木枝干的不同分辨率的等值线模型和Delaunay三角网模型,并使用射线碰撞检测技术提取不同树木枝干的形态结构参数,扩展了提取参数的种类。而且,通过对比参数的精度,确定了构建最佳Delaunay模型的参数设置方法。
1 数据获取与模型构建
1.1 数据获取
利用FARO LS 120具有的扫描距离远、扫描过程非接触、软件动能强的特点,分站点对一株树高为2.23 m落叶后的鹅掌楸(LiriodendrontulipiferaLinn)进行扫描。扫描时仪器与样木距离保持一致,通过扫描控制软件的扫描仪参数设置模块设置不同的扫描分辨率,使用先整体后局部的扫描方式快速获取样木各站点的点云数据,然后手动配准同一分辨率的不同分站的点云数据,从而得到不同分辨率的样木整体点云数据[9-10]。
手动删除样木周围的杂点并去除噪声点,得到树木枝干点云数据。将树木主干和枝条的点云数据分别导出,编号后再合并到一起,这样可以建立整个枝干简单的拓扑结构。原始点云和处理后的点云如图1和图2所示。

图1 原始点云数据
1.2 模型构建
单木的不规则三角网模型是单木模型中应用最为广泛的一种模型。使用分辨率较高的点云数据构建出的树木枝干Delaunay三角网格模型中,三角形比较密集,可以反映树木枝干更多的信息,反之,三角形就比较稀疏,模型细节表现就会很差,因此可以根据具体需要构建出具有不同分辨率的树木枝干Delaunay三角网格模型。并且,与其他模型相比较,该模型在树木参数提取方面具有很大的优势。
利用树木枝干点云数据直接剖分构建Delaunay三角网格的过程非常复杂,而且不利于点云数据的精简压缩。为此,可以采用分而自治的思想,首先将点云数据沿树干方向分层,使用迭代的凸包算法分别计算每一层中某一微小区间点云中不同枝条的凸包折线,构建树木枝干的等值线模型[11],然后在同一枝条的相邻凸包线间依次使用三角网生长法构建其Delaunay三角网,最后合并所有三角网构建出树木枝干的Delaunay三角网模型[12-15],算法过程如图3所示。
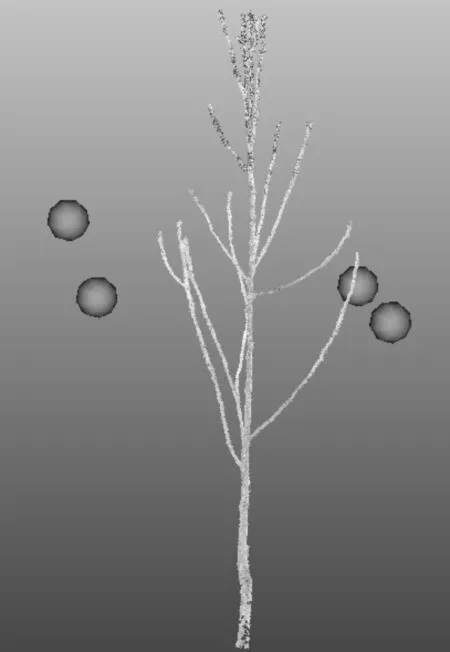
图2 处理后的点云数据

图3 模型构建算法流程图
在提取等值线的过程中,等值线模型中包含的点的数量会因点云数据分辨率的不同而不同,当分层数量相同时,利用各分辨率数据提取等值线中点的数量对比如表1所示。
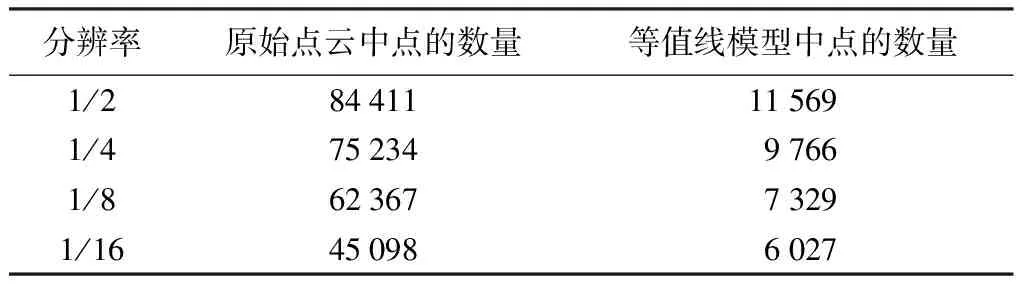
表1 点数量对比分析
表1中当分辨率为1/2时,表示的分辨率为20 000 pt/360°。由表1可以看出,点云数据的分辨率越高,提取的等值线模型中点的数量也会越多。等值线模型中点的数量也会越多。
利用同一分辨率的点云数据提取等值线模型,分层数量不同,提取出的等值线稀疏程度就会不同,构建出的树木枝干Delaunay三角网模型效果也会有所不同。图4为层数不同时,Delaunay三角网模型的效果比较,分层数越多,树木枝干Delaunay三角网格模型越好。
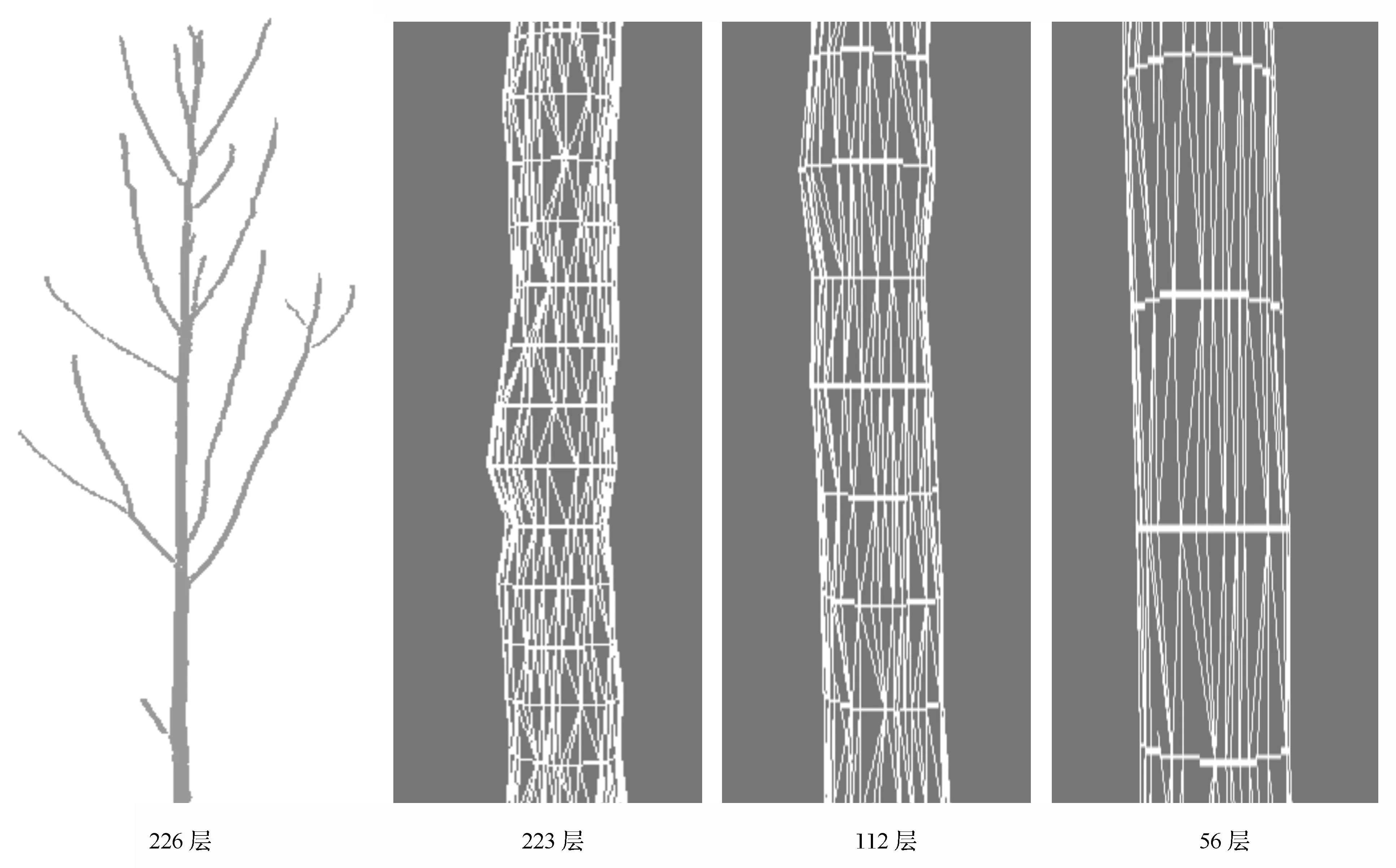
图4 Delaunay三角网格模型
2 参数提取
2.1 .X文件格式
Delaunay三角网格模型的一个很重要的优点就是能够以.X格式的文件保存。.X是由模板(template)驱动的一种三维文件格式。这种文件不仅可以直接使用DirectX Viewer插件打开,观察模型的具体形态,而且可以被DirectX或通过XNA素材管线直接调用,进而在图形程序中使用。
.X文件的模板定义了数据对象的存储方式,但是具有很大的灵活性,用户可以根据需求定义自己的模板。使用.X文件存储树木枝干Delaunay三角网模型,不仅可以存储模型的基本数据,例如顶点坐标、颜色、法向量、纹理信息等,而且可以在.X文件中使用框架(Frame)对其进行组织和管理。在使用的过程中可以对整个模型进行操作,也可以单独处理框架中的一部分。因为树木枝干Delaunay三角网模型的构建过程采用了枝和干分别构建的方式,所以可以采用存储模板进行存储,见图5。
2.2 射线碰撞检测算法
通过三维场景中的射线碰撞检测技术可以有效提取树木模型中的形态结构参数。其原理是把获取到的屏幕坐标转化成图形系统的视口坐标,并给该点加上不同的深度,计算拾取射线,并将射线和模型变换到同一坐标系中,判断射线是否和模型碰撞[16]。如果碰撞,判断模型中与射线发生碰撞的模块,遍历该模块中的每一个三角形,找出与射线相交的三角形,计算出射线和模型中三角形的交点。通过两个交点坐标的距离或者3个交点组成的夹角可以提取出树木枝干模型不同的形态结构参数。该算法的整体思路如图6所示。

图5 Delaunay三角网模型存储模板

图6 射线碰撞检测算法流程图
3 系统开发
通过以上对树木枝干模型建立和参数提取方法的介绍和分析,使用面向对象的编程语言C#,结合图形开发XNA技术,在集成开发环境(IDE)Visual
Studio.Net软件开发平台之上开发基于三维激光扫描的树木枝干模型构建和参数提取系统,实现点云数据的树木枝干Delaunay三角网模型的构建和参数提取。
3.1 系统功能分析和结构设计
根据对树木枝干模型构建和参数提取的目标和需要,系统要实现的功能有:(1)树木枝干建模。基于三维激光扫描得到的点云数据,利用本研究中描述的树木模型构建方法,构建树木枝干Delaunay三角网格模型。(2)树木枝干形态结构参数提取。利用以上建立的Delaunay三角网格模型,实现树木枝干形态结构参数的提取。
根据以上系统功能分析,将系统分为模型构建模块和参数提取模块两个部分。模型构建模块中主要包括点云数据处理模块、等值线提取模块和三角网格构建模块,主要功能是通过对点云数据的处理,提取树木枝干Delaunay三角网格模型。参数提取模块的功能是实现树木枝干形态结构参数的提取。系统输入、输出的设计如图7所示。
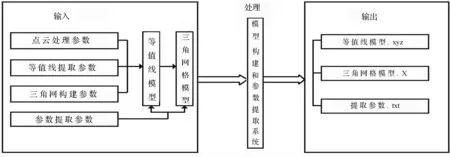
图7 系统输入、输出设计
3.2 系统运行
3.2.1 系统参数设置
系统参数设置区主要包括树木枝干点云数据处理控制页,模型构建控制页,参数提取控制页。点云处理控制页的主要功能是合并树木不同枝干的点云数据,并使其显示在左侧的三维显示区域内;模型构建控制页主要是通过用户输入参数,构建树木枝干等值线模型和Delaunay三角网模型;参数测量控制页主要为用户提供“测量距离”和“测量角度”的选择,系统会根据用户的选择匹配鼠标在三维显示区的操作,使用射线碰撞检测技术提取用户需要的参数,见图8所示。
3.2.2 参数测量
提取参数时,系统三维显示区中显示的必须是.X文件格式的树木枝干Delaunay三角网模型,以保证射线碰撞检测的顺利执行。在参数提取控制页中,选择需要测量参数的形式,点击工具栏中“测量点”,鼠标会改变到测量形态,在左侧三维显示区中点击树木枝干三角网格模型需要测量的位置,当手动测量模块中出现测量点的三维坐标时,点击下一点,当测量点的数量满足测量参数的形式时,系统会自动计算出测量值,以此测量出需要的参数。
4 结果与分析
使用上述系统提取相同分层数量不同分辨率下的树高、胸径、冠幅、冠高、枝下高,和实际测量的数据对比如表2所示。

表2 分辨率不同时测量数据对比
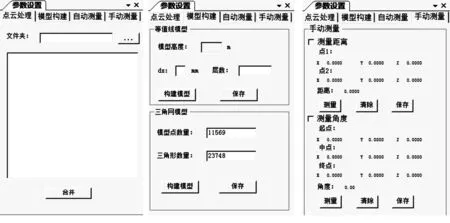
图8 系统参数设置区
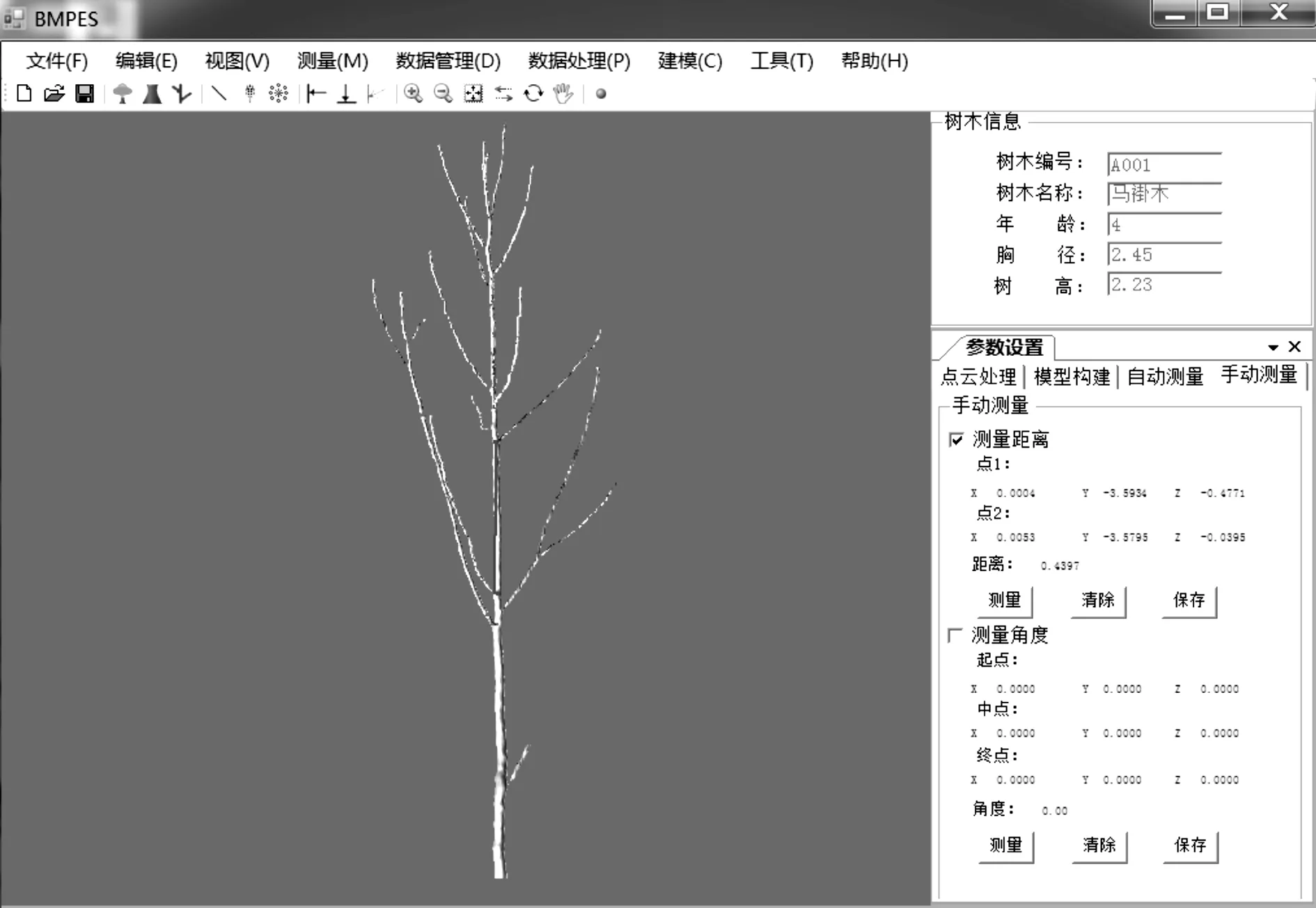
图9 使用系统测量参数
根据表2中的数据,做不同分辨率下各参数折线图(图略)。从系统中测量的数据普遍比实际测量的数据小,但是误差在5%以内。原因主要是射线碰撞检测的交点并不是三角形的边缘点,而是三角形的中心点,以此来计算的提取点会比模型边界点偏小。而各分辨率点云数据测量结果相差不大,切无实质性规律。原因主要是利用不同分辨率的点云提取的等值线中点与点之间的差距不大,形成的三角形没有明显差异。
当分辨率相同时(1/2),使用上述系统设置不同的分层数,分别构建树木枝干的Delaunay三角网模型,提取其树高、胸径、冠幅、冠高、枝下高,和实际测量的数据对比如表3所示。

表3 分层数量不同时测量数据对比
根据表3中的数据,做不同参数的折线图(图略)。从Delaunay三角网模型中测得的数据绝大部分小于实际测量值,而且不同的参数在层数发生改变时,表现出了不同的变化,树木的胸径误差随着层数的减少呈现减小的趋势,其他各参数缺相反,误差随着层数的减少而增大。总体来说,分的层数越多,使用系统测量出的数值越精确。为进一步验证结论的正确性,提取全部枝条的枝长,和实际测量数据相对比如表4。
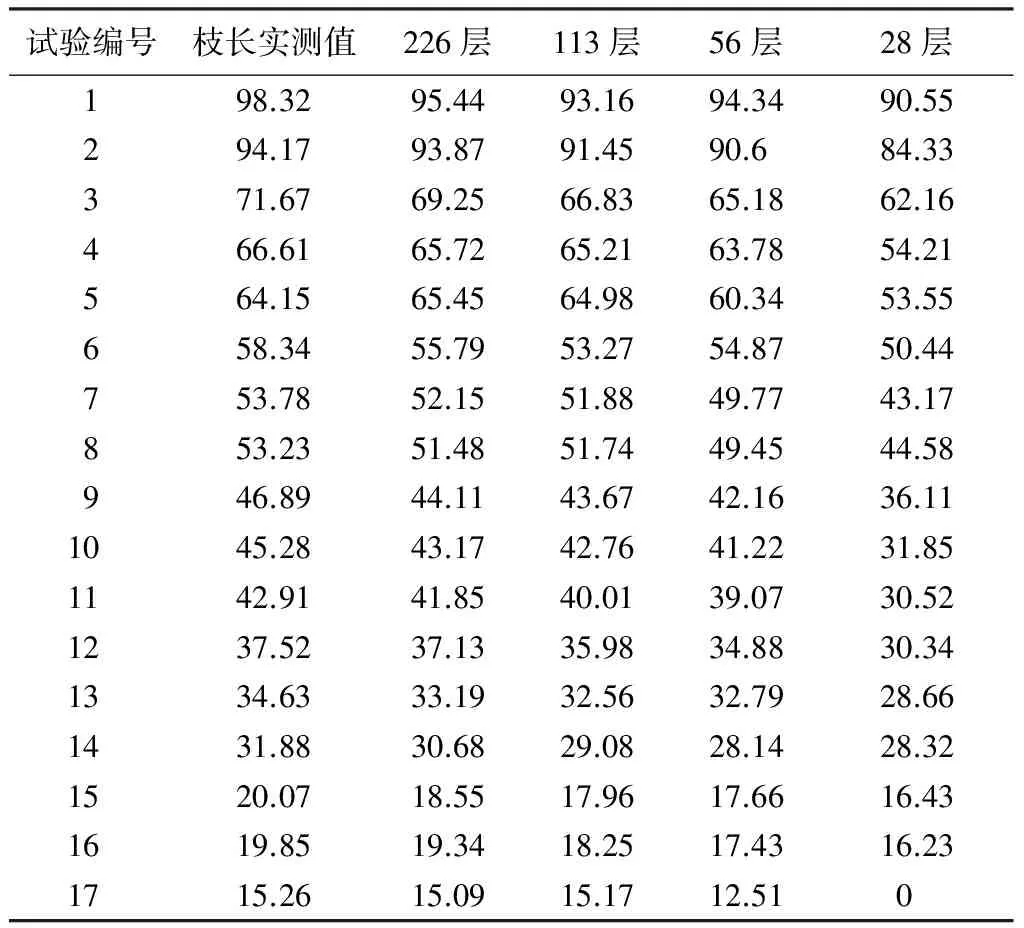
表4 不同层数量下分枝长度 cm
由表4数据分别作不同分层数量系统测量数据与实际测量数据的散点图(图10),并进行线性回归拟合,利用拟合方程求出其理论值,根据公式(理论值—测量值)/测量值,得到层数为226、113、56、28层的误差分别为3.3%、5.7%、9.5%、25.6%。分层数量越大,精度越高,当层数为226层,即分层厚度为1 cm时的测量误差可以满足林业测量需求。

图10 枝长散点图
5 结论
本文把地面三维激光扫描技术和树木可视化技术结合起来,充分利用地面三维激光扫描技术的特点,发挥其在快速测量方面的优势,为单木的三维重建和参数提取提供了一条新的途径。
使用文中开发的系统,利用不同分辨率的点云数据分别构建了层次树木枝干的Delaunay三角网格模型,并使用射线碰撞检测技术提取其形态参数。通过对比表明,在扫描距离一定的情况下,分辨率对参数精度的影响较小,主要原因是不同分辨率等值线模型中点与点之间的差距不大。相比较,在分辨率一定的情况下,当分层数量改变时,参数精度却有着不同的变化。层数越多,Delaunay三角网中的三角形越规整,参数精度越高。
应该指出的是,在使用凸包算法提取等值线模型的过程中,提取出的仍旧是折线段,利用这些折线段构建的Delaunay三角网格模型的表面并不光滑,应该考虑使用特殊的拟合方法把这些折线拟合成光滑的曲线,这样模型效果会更好。
[1] 赵阳,余新晓,信忠保,等.地面三维激光扫描技术在林业中的应用与展望[J].世界林业研究,2010,23(4):41-45.
[2] 冯仲科,罗旭.基于三维激光扫描成像系统的树冠生物量研究[J].北京林业大学学报,2007,29(增刊2):52-56.
[3] 吴春峰,陆怀民.利用三维激光扫描系统测量立木材积的方法[J].森林工程,2009,25(3):71-76.
[4] Wezyk P, Koziol K. Terrestrial laser scanning versus tradition al forest inventory first results from the polish forests[J]. International Archives of Photogrammetry and Remote Sensing,2007,36(3):424-429.
[5] Jakob Wei. Application and statistical analysis of terrestrial laser scanning and forest growth simulations to determine selected characteristics of Douglas-Fir stands[J]. Remote Sensing of Environment,2012,112:123-137.
[6] Gabor Brolly, Geza Kiraly. Algorithms for stem mapping by means of terrestrial laser scanning[J]. Acta Silv Lign Hung,2009,5(1):83-107.
[7] 韩光瞬,冯仲科,刘永霞,等.三维激光扫描系统测树原理及精度分析[J].北京林业大学学报,2005,27(增刊2):187-190.
[8] 邓向瑞,冯仲科,罗旭.三维激光扫描系统在林业中的应用研究[J].北京林业大学学报,2005,27(增刊2):43-47.
[9] Hopkinson C, Chasmer L, Young Pow C. Dataset of carbo East Asia and uncertainties in the CO2budget evaluation caused by different data processing[J]. Journal of Forest Research,2003,18(1):41-48.
[10] 吴杭彬,刘春.激光扫描数据的等值线分层提取和多细节表达[J].同济大学学报:自然科学版,2009,37(2):267-271.
[11] Kolingerova I, Zalik B. Improvements to randomized incremental Delaunay insertion[J]. Computers & Graphics,2002,26:477-490.
[12] Sohler C. Fast reconstruction of Delaunay triangulations[J]. Computers & Graphics,2005,29:166-178.
[13] Liu Jianfei, Yan Jinhui, Lo S H. A new insertion sequence for incremental Delaunay triangulation[J]. Acta Mechanica Sinica,2013,29(1):99-109.
[14] 吴宇晓,张登荣.生成Delaunay—三角网的快速合成算法[J].浙江大学学报:理学版,2004,31(3):343-348.
[15] 郭艳霞,侯彤璞,杜园园.基于DirectX的三维场景实体的拾取[J].辽宁石油化工大学学报,2009,29(3):77-84.
1) 国家自然科学基金项目(31170590);国家“863”计划课题(2012AA102002)资助。
高士增,男,1987年12月生,中国林业科学研究院资源信息研究所,硕士研究生。
张怀清,中国林业科学研究院资源信息研究所,博士研究生,研究员。E-mail:zhang@caf.ac.cn。
2013年5月22日。
S791.27
Morphological Parameters Extraction of Tree Branches Based on Point Cloud/Gao Shizeng, Zhang Huaiqing, Liu Min(Research Institute of Forestry Resource Information Techniques, Chinese Academy of Forestry, Beijing 100091, P. R. China); Zhu Zhonghua(Huangfengqiao Workstation, Forestry Bureau of You County)//Journal of Northeast Forestry University.-2014,42(4).-109~114
责任编辑:潘 华。
With branches point cloud of different resolution as the data source, we extracted contour models and Delaunay triangular mesh model with different levels using iterative convex hull algorithm and triangulation growth algorithm respectively, and extracted the morphological parameters of these model by ray collision detection technique. By comparison, the accuracy of parameters extracted using models with different resolution differs little when stratified with the same number, and the error is less than 5% compared with the values in the actual measurement. When the resolution is certain, the more layers the model has, the better the effect is and the higher the accuracy of the extracted parameters is. Therefore, it may be appropriate to reduce the resolution to reduce the scan time in the process of 3D laser scanner, and increase the number of hierarchical to get a better model performance results in the modeling process.
