混合隔振系统自适应模糊滑模控制
2014-07-27杨理华朱石坚楼京俊
杨理华,朱石坚,楼京俊,李 棒
(1.海军工程大学 动力工程学院,武汉430033;2.中国人民解放军海军 南海工程设计院,广东 湛江524005)
混合隔振系统自适应模糊滑模控制
杨理华1,朱石坚1,楼京俊1,李 棒2
(1.海军工程大学 动力工程学院,武汉430033;2.中国人民解放军海军 南海工程设计院,广东 湛江524005)
针对机械设备被动隔振在低频段隔振效果较差的问题,建立磁致伸缩作动器的电—磁—机转化数学模型,提出一种基于自适应模糊滑模控制算法,并用李雅普诺夫方法证明控制器的稳定性,将该控制策略与磁致伸缩作动器应用于混合隔振系统中。仿真结果表明:在单频、多频及随即激励条件下,自适应模糊滑模控制器具有良好的动态特性和鲁棒性,能够提高系统隔振效率并拓宽隔振频段,有效减小传至基础的力。
振动与波;被动隔振;磁致伸缩作动器;自适应模糊滑模算法;混合隔振
振动会对机械设备形成干扰,使其工作可靠性下降,甚至会造成严重损失。传统的被动隔振技术应用已久,但是机械设备在外界激励振幅较大或低频条件下其隔振效果较差且隔振频段较窄,而主动控制恰好弥补了这一不足[1,2]。随着智能材料和主动控制技术的发展,被动隔振技术已不能满足振动控制精度的需求。因此,有必要将智能材料、被动隔振及主动控制结合而形成混合隔振系统来解决相关问题,但这方面的研究还是相对较少[3—5]。
磁致伸缩材料(giant magnetostrictive material,GMM)为一种新型的智能材料,具有定位精度高、响应速度快、工作频带宽、能量转换效率高、输出力大等优点,由其制作的磁致伸缩致动器(magnetostrictive actuator,MA)在振动控制领域、精密定位、机器人等领域有广泛的应用前景[6—10]。张磊[11]分析了MA的状态空间控制模型,通过传递函数研究了系统参数对隔振性能的影响,但并未对其在主动控制中的应用进行研究。Geng Z J[12]采用TeHenol-D作动器进行了6自由度Stewart平台的主动振动控制实验研究,使平台的振动有一定衰减。张天飞[13]建立了磁致伸缩作动器的动力学方程,并结合PID控制算法将其运用到隔振系统中对低频振动有一定的减振效果,但系统的自适应能力较差。Francesco[14]计算了MA传递函数的幅频曲线,以单自由度隔振系统为基础进行了MA的主动控制仿真研究,结果表明使用MA可明显减小传递至基础的力。王社良[15]设计出一种磁致伸缩作动杆,并以LQR算法为基础分析了系统的结构振动,结果表明磁致伸缩材料作动杆可有效地减小结构的加速度和位移响应。谢向荣[16]以压磁理论和Stone-Weierstrass定理为基础,建立了柔性基础上的混合隔振系统的刚度非线性动力学模型,但是仅分析了混合隔振系统幅频特性及电流对系统隔振效果的影响。
混合隔振系统中隔振器存在动刚度、外界时变激励等不确定性因素,所以有必要在控制策略中充分考虑系统的鲁棒性。滑模控制算法在系统处于滑动模态时与系统参数及外部扰动无关,具有较好的鲁棒性,但是传统的滑模控制在系统进入滑模面时存在一定的抖振,本文将自适应、模糊理论及滑模控制结合起来构成自适应模糊滑模控制器,以期混合隔振系统具有较好的鲁棒性及优良的隔振效果。
1 磁致伸缩做动器的数学模型[17—20]
磁致伸缩作动器的原理图如图1所示,主要由偏置磁场,GMM棒,驱动磁场等组成。在低频条件下,忽略涡流损耗和温漂影响,作动器动态特性可以用2阶系统描述。根据克希荷夫定律及磁场理论可知

其中R、L′、I(t)、V分别为驱动线圈电阻、电感、电流、电压,为线圈因数,Hbias为偏置磁场强度,l为GMM棒的实际长度,n为驱动线圈的匝数。

图1 磁致伸缩做动器的原理图
根据压磁理论可知,GMM棒机械特性可表示为

其中SH为轴向的柔顺系数,σ为轴向应力,d为轴向压磁系数,H为轴向的磁场强度,μσ为轴向相对磁导率,ε为轴向应变,B为轴向磁感应强度。若考虑GMM棒的质量与阻尼影响时,则方程(3)可修正为

其中c、ρ、L、A分别为GMM棒内部等效阻尼系数、密度、物理长度、横截面积,应变在弹簧的预紧力σ0作用下,GMM棒的输出力fa与顶杆输出力f和预紧力满足式(5)

由于实际应用中,GMM棒总受弹簧预应力σ0和Hbias作用,存在静态平衡位置x0可表示为


其中,m2、c2、k2分别为负载(包括输出顶杆、末端质量)等效质量、阻尼系数、刚度系数,
实际测量到的位移x1=x-x0,联立式(2)、(4)、(5)、(6)可得分别为GMM棒等效质量、阻尼系数和刚度系数。联立(2)、(5)、(7)式由拉氏变换可得作动器输出力和驱动电压的传递函数为


图2 混合隔振系统模型
2 混合隔振系统模型
本文所研究混合隔振系统模型如图2所示,上层质量为M2,阻尼为C2,刚度系数K2,下层质量为M1,阻尼系数为C1,刚度系数为K1,f为磁致伸缩作动器输出力,由此可得混合隔振系统动力学方程如下
四是力图贴近当代中小学生的语文生活,体现时代性。比如,体现在七年级上册教材中,课文的选择在体现作家作品、文章风格方面,就非常丰富且视野更加开阔。全面的中国风采以及部分优秀外国作家的作品等,共同对学生的学习以及良好的语文素养的养成,都起到了非常积极的促进作用;并且,在实现课堂教学的三维教学目标之“情感态度与价值观”目标过程中,也更加易于操作和对学生产生积极的影响,从而实现新教材的通过文本阅读对学生思想产生“有机渗透”以“立德树人”的目标。


3 控制策略的设计及分析[21—25]
3.1 自适应模糊滑模控制器(Adaptive Fuzzy Sliding Mode Control,AFSMC)的设计
滑模控制是根据系统偏差及其各阶导数值,以跃变方式切换完成滑模运动,整个过程未对运动轨迹作出限制,因此滑模控制具有优良的动态控制效果。本文以式(10)为基础设计滑模控制器,其切换函数如下:


式中 ε为系统运动点趋近切换面的速率,sat(s)为饱和函数,k为指数趋近系数。
传统的滑模控制律存在一定的抖振现象,为使提高控制器的稳定性,需要对ε、k进行修正。本文建立了ε与|S|间的线性函数如式(13)所示,该式可满足滑模控制器对切换速率ε自适应的要求,β为修正系数
此外趋近系数k对滑模控制抖振也有较大的影响,本文提出提出用模糊控制消除其对抖振的影响。建立和Δk之间的模糊系统,系统模糊输入输出集为

本文采用积分法对趋近系数k进行上界估计

其中δ为比例系数,δ>0。根据以上分析可知联立式(11)、(12)、(13)、(15)可得自适应滑模控制律为

表1 系统模糊规则表

3.2 自适应模糊滑模控制器的稳定性分析
本文使用李雅普诺夫方法证明自适应滑模控制器的稳定性。通常用李雅普诺夫函数的到达条件来描述系统全局到达条件,李雅普诺夫函数如式(17)所示

显然,S(t)=0是系统的唯一平衡点,在该点系统已经稳定,在连续条件下李雅普诺夫函数1阶导数可表示为

联合式(11)、(12)、(18)可得:

由于 ε、k都为正数,故当S(t)>0时,sat(S(t))>0、|S(t)|>0且S2(t)>0,有;当S(t)<0时,sat(S(t))<0且S2(t)>0,有,故而总有,因此所设计的滑模控制器是满足李雅普诺夫渐进稳定条件的,本文所研究系统为线性系统,因此也是全局稳定的。
4 数值算例
混合隔振系统的隔振性能主要考虑传递至基础的力。以被动隔振为参考对象,研究混合隔振系统在单频、多频及白噪声激励下的响应用以评价其隔振效果,参数如表2所示。
由相关参数知系统固有频率为3.22 Hz、16.77 Hz。为验证混合隔振系统隔振效果,取单频激 励5 Hz、12 Hz、25 Hz及多 频激 励6+20+50 Hz,仿真结果如下图(3)—图(8)所示。
由图3、图4、图5、图6、图7可知,在单频5 Hz、12 Hz、25 Hz、多频6 Hz+20 Hz+50 Hz及随机信号激励下,相对于被动隔振,混合隔振系统传递至基础的力幅值有较大幅度下降,两种控制方法均可有效衰减了外界激励对基础的影响,但自适应模糊滑模控制的混合隔振相对于传统的滑模控制混合隔振有更好的控制效果。

表2 混合隔振系统仿真参数
本文用分别用混合隔振1、混合隔振2表示传统滑模控制及自适应模糊滑模控制的混合隔振。由表3可知,在单频、多频及随机激励条件下,混合隔振1传递至基础的力均方值分别下降了11.3%、2.3%、-0.3%、22.0%、7.4%;混合隔振2传递至基础的力均方值分别下降了19.6%、4.0%、0.6%、35.6%、25.8%。因此,基于自适应模糊滑模控制算法的混合隔振系统在较宽的频段内具有明显的隔振效果,可以进一步有效减小传递至基础的力。
由图8可知,被动隔振系统的两个峰值所对应的固有频率与理论计算的固有频率完全吻合,且在1、2阶模态时相对于被动隔振,混合隔振1及混合隔振2分别获得15 dB、10 dB及28 dB、18 dB的隔振效果,混合隔振的固有频率分别为2.6 Hz、22.5 Hz及2 Hz、38.8 Hz,与被动隔振交叉点的横坐标分别为2.8 Hz、67 Hz及2.2 Hz、132 Hz。因此,混合隔振改变了系统的固有频率且自适应滑模控制的混合隔振更加有效地拓宽系统的隔振频段。由此说明,混合隔振也比较适合于中低频段的振动控制,这弥补了被动隔振隔振效果的不足,有效拓宽了隔振频段,对研究中低频段的隔振有着重要的作用。
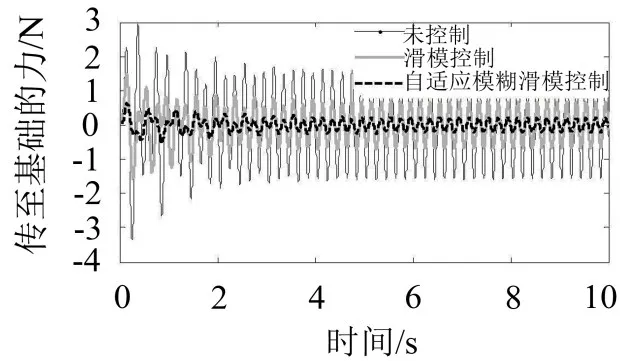
图3 5 Hz激励传至基础的力历程图

图4 12 Hz激励传至基础的力历程图

图5 25 Hz激励传至基础的力历程图
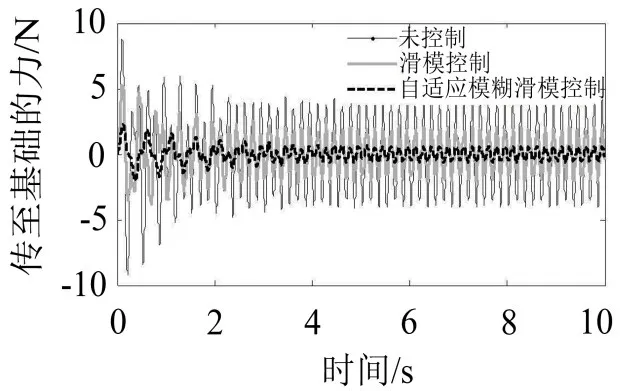
图6 多频激励时激励传至基础的力历程图

图7 白噪声激励传至基础的力历程图

图8 系统力传递
5 结语
本文针对被动隔振在中低频段隔振效果较差的现状,建立了磁致伸缩作动器的电—磁—机动力学方程,结合滑模控制理论,提出一种自适应模糊滑模控制器的设计方法,并使用李雅普诺夫理论分析了该算法的稳定性,进而研究了其在混合隔振系统中的应用,结果表明:在单频激励、多频激励及随即激励条件下,混合隔振系统隔振效果均明显优于被动隔振;自适应模糊滑模算法相对传统滑模算法具有更好的控制效果,可以更为有效地拓宽系统的隔振频段,提高响应速度,有效减小传递至基础的力;混合隔振有一定的控制范围,超出其控制频段隔振效果与被动隔振相当。本文对研究混合隔振系统的设计和工程应用具有一定实际意义。

表3 隔振性能对比
致谢
感谢国家自然科学基金(51009143)和全国优秀博士学位论文作者专项基金(201057)支持。
[1]Engdahl G.Handbook of giant magnetostrictive materials [J].Academic press,2000.
[2]Koko T.S,Akpan U.O,Berry A.“Vibration control in ship structures”,Encyclopedia of Smart Materials,John Wiley and Sons Ltd.2002.
[3]李国平,魏燕定,杨东利.陈子辰用于微振动控制的超磁致伸缩驱动器的研究[J].微电子学,2002,32(3):182-184.
[4]潘海兵,刘晋浩,赵文锐.混合振动控制技术的研究[J].煤矿机械,2008,29(12):11-13.
[5]胡世峰,朱石坚,楼京俊.潜艇动力设备混合隔振自适应控制系统[J].噪声与振动控制,2011,3:107-111.
[6]Sathishkumar R,Prasath J S.Terfenol-D∶a high power giant magnetostrictive material for submarine mapping[J].International Journal of Engineering Science and Technology,2010,2(12)∶7165-7170.
[7]陶孟仑,陈定方,卢全国,等.超磁致伸缩材料动态涡流损耗模型及试验分析[J].机械工程学报,2012,48(13):146-151.
[8]胡世峰,朱石坚.基于CMAC小脑神经网络的超磁致伸缩作动器高精度控制的仿真研究[J].振动与冲击,2009,28(3):68-72.
[9]H.Y.Lau,K.P.Liu.Feasibility of using gmm based actuators in active control of journal bearing system[J].Proceedings of the World Congress on Engineering 2009 Vol II WCE 2009,July 1-3,2009,London,U.K.
[10]Hiller M.W,BryantM.D,Umegak i.J.Attenuation and transformation of vibration through active control of magnetostrictive terfenol[J].Journal of Sound and Vibration,1989;134(3)∶507-519.
[11]张磊,刘永光,付永领,等.基于磁致伸缩作动器的主动隔振系统分析[J].航空动力学报,2004,19(6):782-78.
[12]Z Jason Geng,Leonard S Haynes.Six degree of freedom active vibration control using the stewart platforms[J].IEEE Transactions on Control Systems Technology, March,1994,2(1)∶45-53
[13]张天飞,汪鸿振,孙曜.超磁致伸缩作动器用于振动主动控制中的仿真研究[J].振动与冲击,2006,25(1):61-65.
[14]Francesco Castelli Dezza,Simone Cinquemani.A model of magnetostrictive actuators for active vibration control.Proceedings of 2011 IEEE 5 th international conference on mechanics of biomaterials and tissues Italy,February 15.
[15]王社良,纪庆波,代建波,等.基于超磁致伸缩作动杆的结构振动主动控制研究[J].噪声与振动控制,2010,6:23-26.
[16]谢向荣,朱石坚.船舶动力机械双层混合隔振系统非线性动力学特性研究[J].振动与冲击,2010,29(3):174-177.
[17]Clark A E.Magnetostrictive rare earth-Fe2 compounds [M].Edit by EP Wohlfarth.New York,USA∶North-Holland Publishing Company,1980.
[18]Clark A.E,Savage H.T,Spano M.L.Effect of stress on magnetostriction and magnetization of single crystal of Tb27Dy73Fe2[J].IEEE Transactions on magnetics, 1984,20(5)∶1443-1445.
[19]Won-jong Kim,Ali Sadighi.A novel low-power linear magnetostrictive actuator with local three-phase excitation[J].USA IEEE/ASME Transactions on Mechatronics,2009,21(10)∶3017-3021.
[20]王博文,曹淑瑛,黄美文.磁致伸缩材料与器件[M].北京:冶金工业出版社,2008.
[21]金 峤.结构振动的滑模变结构控制研究[D].大连:大连理工大学,2005.
[22]刘金锟.滑模变结构控制MATLAB仿真[M].北京:清华大学出版社,2005.
[23]S.Yu,G.Alici,B.S hirinzadeh.Sliding mode control of a piezoelectric actuator with neural network compensating rate-dependent hysteresis.Proceedings of the 2005 IEEE [J].International Conference on Robotics and Automation Barcelona,Spain,April 20.
[24]David Young K.A control engineer's guide to sliding mode control[J].IEEE Transactions on Control System Technology,2004,3∶156-164.
[25]Ricardo C.L.F.Oliveiraa,Maurício C.de Oliveirab,Pedro L.D.Peresa.Convergent LMI relaxations for robust analysis of uncertain linear systems using lifted polynomial parameter-dependent Lyapunov functions[J].Systems&Control Letters,2008,57(8)∶680-689.
Adaptive Fuzzy Sliding-mode Controller for Hybrid Vibration Isolation Systems
YANG Li-hua1,ZHU Shi-jian1,LOU Jing-jun1,LIBang2
(1.College of Power Engineering,Naval Univ.of Engineering,Wuhan 430033,China; 2.South Sea Engineering Design Institute of the PLANavy,Zhanjiang 524005,Guangdong China)
∶Aiming at the problem of poor vibration isolation effect of passive vibration isolators of mechanical equipment in low frequency range,an electric-magnetic-mechanical conversion model for magnetostrictive actuators is established,and an adaptive fuzzy sliding-mode control algorithm is proposed.The stability of the controller is proved by Lyapunov method.Then,the control strategy and the magnetostrictive actuator are used in a hybrid vibration isolation system.The simulation results show that in whatever conditions of single frequency excitation,multi-frequency excitation or random excitation,the adaptive fuzzy sliding-mode controller has good dynamic characteristics and robustness.This property can also be used to improve the isolation efficiency and broaden the vibration isolation frequency band of the hybrid system,and effectively reduce the force transmitted to the foundation of the mechanical equipment.
∶vibration and wave;passive vibration isolation;magnetostrictive actuator;adaptive fuzzy sliding mode algorithm;hybrid vibration isolation
O328< class="emphasis_bold">文献标识码:ADOI编码:
10.3969/j.issn.1006-1335.2014.06.043
1006-1355(2014)06-0192-05
2014-03-27
杨理华(1985-),男,陕西汉中人,博士研究生,振动与噪声控制专业。
E-mail∶dreamfly4@163.com
