基于遗传算法的汽车主动悬架最优PID控制与仿真
2014-07-21司志远苑风霞
司志远,苑风霞
(安徽科技学院 机电与车辆工程学院, 安徽 滁州233100)
基于遗传算法的汽车主动悬架最优PID控制与仿真
司志远,苑风霞
(安徽科技学院 机电与车辆工程学院, 安徽 滁州233100)
本文以车辆主动悬架系统为研究对象,建立了1/4车辆模型,在此基础上建立simulink模型,并设计了PID控制器,然后运用遗传算法对相关参数进行了优化设计,实现了主动悬架的最优PID控制.最后对比了主、被动悬架的性能指标(车身加速度、悬架动挠度、车轮动位移),结果表明通过本文方法实现的最优PID控制器对于改善车辆的行驶平顺性和稳定性是有效的.
主动悬架;PID;遗传算法;最优控制
汽车悬架系统性能是汽车平顺性和行驶稳定性的决定因素,传统的被动悬架由于阻尼、刚度等参数的限制,很难满足汽车性能改善的需要,而主动悬架通过给悬架输入一定的作动力,能够提高汽车的平顺性等性能.
主动悬架的设计关键是控制方法及策略,其中最优控制能够在一定条件下,完成控制任务,使得选定的指标最小,能够取得较好的效果,国内外学者对其进行了大量研究.但是,在最优控制问题的求解中,为使得问题解析可解,需要引入附加的约束或条件,如二次型最优控制问题[1-2]中要引入矩阵Q、R等.本文基于微分方程建立仿真模型(simulink模型),运用遗传算法实现悬架的最优控制.
1 汽车主动悬架系统数学模型
本文选用2自由度1/4车辆建立系统模型,系统模型如图1所示.
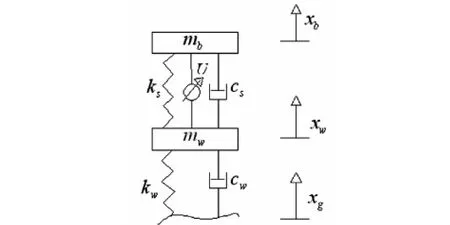
图1 2自由度1/4车辆模型
模型中参数的意义,mb为簧载质量,mw为非簧载质量,ks、cs分别为悬架的刚度和阻尼,kw、cw分别为轮胎的刚度和阻尼,U为悬架的主动控制力.xb、 xw、xg分别为车身垂向位移、轮胎垂向位移、路面不平度.
根据牛顿第二定律,建立2自由度1/4车辆模型的运动微分方程,如下所示.
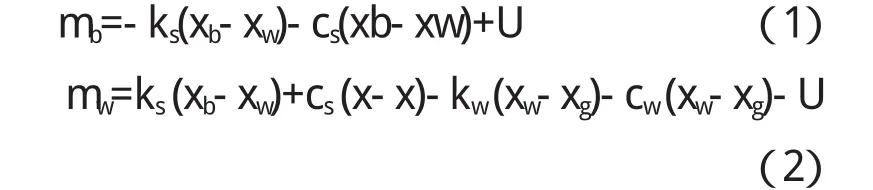
根据方程 (1)、(2),在simulink中建立1/4车辆的仿真模型,如图2所示.
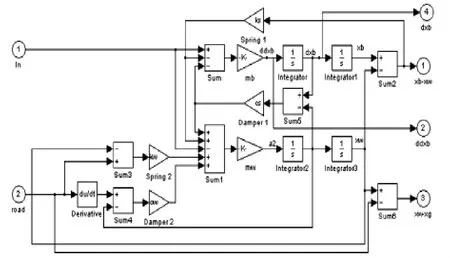
图2 1/4车辆的仿真模型
2 主动悬架系统simulink模型
建立PID控制器[3]作为主动控制器,控制器模型如下

其中e(t)为车身加速度相对于参考值的误差.
在simulink中建立的模型如图3所示.参数:kp为比例系数、ki为积分系数、kd为微分系数、road为路面输入.
图3 含有主动控制器的系统simulink模型
3 最优PID控制问题的建立
最优PID控制问题[4]是建立在PID控制的基础上,以其相应的参数为设计变量,以系统性能为目标的优化问题.
在车辆悬架设计中,需要考虑的性能指标主要有三方面:(1) 车身加速度—影响乘坐舒适性;(2)悬架动行程—影响车身姿态;(3) 轮胎动负荷及位移—影响轮胎接地性能及汽车操纵稳定性能.因此在使用控制器对悬架进行控制时,必须同时兼顾三种性能,即在改善某一项性能的同时,不能损害其它性能.
在上一节的基础上,选择kp(比例系数)、ki(积分系数)、kd(微分系数)为设计变量,即X=(kp,ki,kd),建立以车身加速度为最小的目标函数,即

根据相应平顺性国家标准[5],车辆乘员没有不舒服感觉的总加权加速度均方根值为0.315m/s2,因为1/4车辆模型研究的是车身加速度均方根值,相当于地板处的加速度,该处的轴加权系数为0.40,根据总加权加速度均方根值计算公式,计算得到目标函数的第一个约束条件.
对于不同的车型,在吸收车身振动的前提下,悬架动行程都有一定的要求,从而得到目标函数的第二约束条件.

其中Ds为悬架动行程的最大值.
为了限制轮胎动负荷,同时具有良好的接地性能,得到另外两个约束条件.

其中Dwg、Dw分别为轮胎最大变形、最大位移.
4 最优PID 控制问题的求解
对最优PID控制问题的求解,优化方法的选择至关重要.传统优化方法的缺点是要以所解问题的凸性作为得到全局最优解的前提条件,否则易得到局部最优解.遗传算法[6]主要借助生物进化中“适者生存”的规律,模拟生物进化过程中的遗传繁殖机制,对优化问题的解空间的每一个个体进行编码,然后对编码后的优化问题进行组合划分,通过迭代从中寻找最优解,其算法的适应性强,对问题本身要求低.而本文所研究的问题的凸性是很难判断的,因此选用遗传算法.
遗传算法的计算过程主要包括个体编码、初始种群的形成、适应度计算、选择运算的复制、交叉运算及操作、变异运算.
适应度函数的定义:计算过程中系统性能的参数计算是在simulink中进行的,为了处理方便,需要将式(6)—(8)的约束条件放到适应度函数里,构造带有惩罚项的适值函数.
即

其中当设计变量的值可行时,pi(X)=0,否则pi(X)取正值,对于不同的约束条件取值不同.
5 路面输入模型[7]
采用滤波白噪声作为路面输入模型,即

其中xg为路面位移,m;G0为路面不平度系数,m3;f0为下限截止频率,Hz;u为车辆行驶速度,m/s;ω(t)为均值为零的高斯白噪声.
6仿真计算及结果
车 辆 模 型 参 数 :mb=2500kg,mw=320kg,ks= 80000N/m,kw=500000,cs=350N.s/m,cw=15020N.s/m,悬架动行程限制Ds=0.15m,轮胎动变形限制Dwg=0. 05m,轮胎位移限制Dw=0.2m.优化参数:选择二进制编码,种群数为50,最大进化代数为200代,交叉概率为0.8,变异概率为0.05,由计算机在变量范围内随机生成初始种群.路面输入参数:G0=64× 10-6m3/cycle,u=20m/s,f0=0.1Hz.路面输入曲线如图4所示.优化结果:kp=201.901,ki=2888.677,kd=1.369.优化前后车身加速度、悬架动挠度、车轮动变形及动位移的仿真结果曲线如图5、图6、图7和图8所示,各性能指标均方根值见表1.
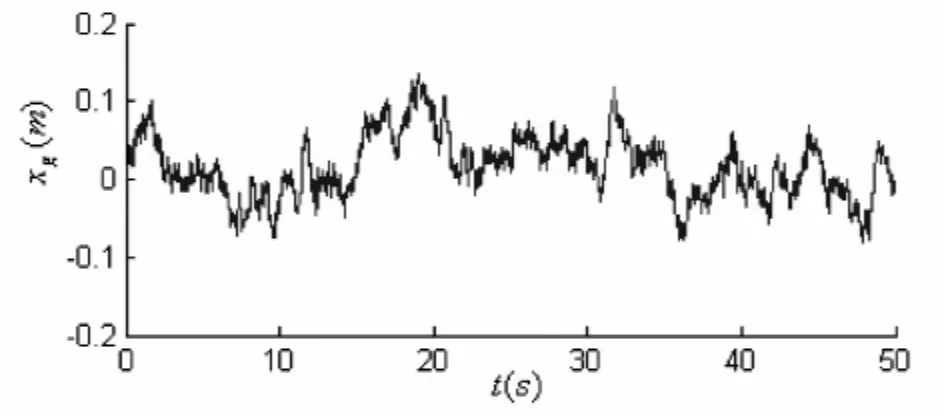
图4 路面输入曲线
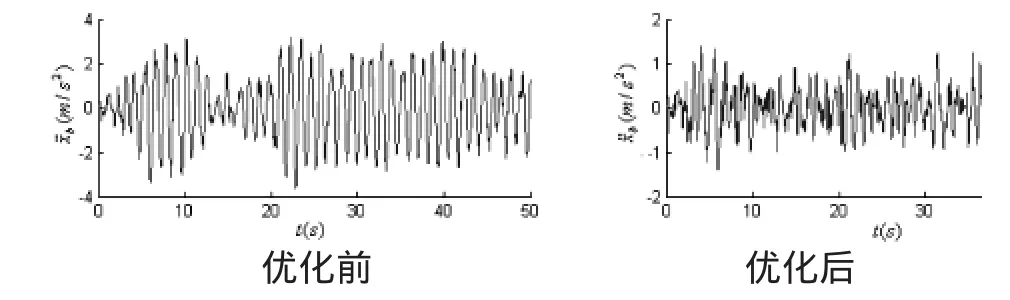
图5 优化前后车身加速度曲线

图6 优化前后悬架动挠度曲线
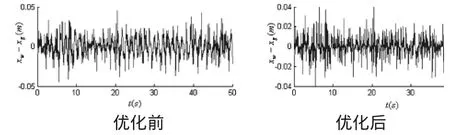
图7 优化前后轮胎动变形曲线
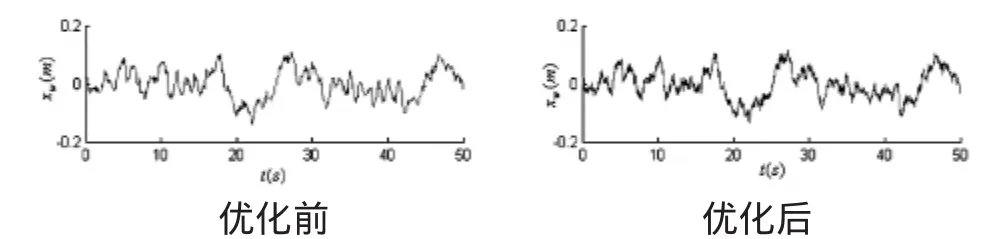
图8 优化前后轮胎动位移曲线
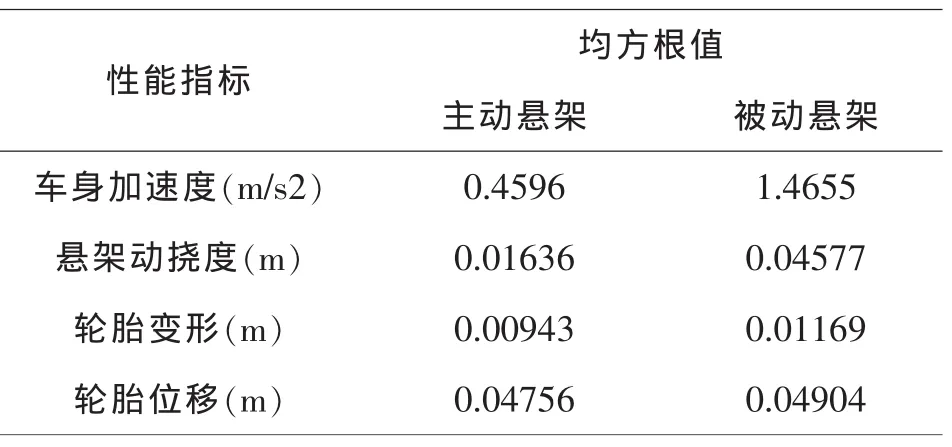
表1 优化前后悬架性能指标均方根值的比较
从图5-8及表1中可以看出,与被动悬架相比,主动悬架能够:(1)有效的降低车身加速度,其均方根值降低到乘员没有不舒服感觉所要求的值以下,提高了舒适性;(2)减少了悬架的动挠度,改善汽车的平顺性;(3)一定程度上减小轮胎变形,从而减小了轮胎动载荷,改善了汽车的操纵稳定性;(4)保持轮胎位移与被动悬架基本一致,从而保持轮胎的接地性能不变.
7结论
建立了带有主动悬架的2自由度1/4车辆系统的simulink模型,运用遗传算法对参数进行优化设计,实现了悬架的最优PID控制,改善了系统的性能,并且与被动悬架对比了悬架的性能指标(车身加速度、悬架动挠度、车轮动位移),结果表明通过本文方法实现的最优PID控制器对改善车辆的行驶平顺性和稳定性是有效的.本文所采取的在simulink中建模(可以结合其它多体动力学软件),运用现代优化方法对系统参数进行优化的方法,具有方便、灵活、适应性强的特点.
〔1〕兰波,喻凡.车辆主动悬架LQG控制器的设计与仿真分析[J].农业机械学报,2004,35(1):13-17.
〔2〕潘国建,刘献栋.汽车悬架参数优化的最优控制方法[J].农业机械学报,2005,36(11):21-24.
〔3〕白金,韩俊伟.基于MATLAB/Simu1ink环境下的PID参数整定[J].哈尔滨商业大学学报(自然科学版),2007,23(6):673-676.
〔4〕薛定宇.控制系统计算机辅助设计[M].北京:清华大学出版社,2005:260-281.
〔5〕Saeed Badran,Ashraf Salah,Wael Abbas. Design of Optimal Linear Suspension for Quarter Car with Human Model using Genetic Algorithms[J].The Research Bulletin of Jordan ACM,VolumeⅡ:42-51.
〔6〕喻凡.车辆动力学及其控制[M].北京:机械工业出版社,2009.106-112.
U463.33
A
1673-260X(2014)06-0047-03
