基于闭环点位置控制的硅微梳齿式加速度计温漂抑制方法
2014-07-19刘云峰董景新
徐 哲,刘云峰,董景新
(1.清华大学 精密仪器系 精密测试技术及仪器国家重点实验室,北京 100084;2.总参陆航研究所,北京 101121)
基于闭环点位置控制的硅微梳齿式加速度计温漂抑制方法
徐 哲1,2,刘云峰1,董景新1
(1.清华大学 精密仪器系 精密测试技术及仪器国家重点实验室,北京 100084;2.总参陆航研究所,北京 101121)
环境温度的变化会造成硅微加速度计检测电路输出漂移,从而使加速度计敏感质量的闭环点位置产生漂移。通过分析闭环点位置对加速度计标度因素K1和零偏K0的影响,证明了闭环点位置漂移是造成零偏K0温漂的主要因素和标度因素K1温漂的次要因素。提出了加速度计闭环点位置控制方法,通过在环内加入控制电压可使闭环点始终工作于稳定位置。试验结果证明,该方法可显著降低零偏K0的温漂,闭环点始终位于零反馈位置时零偏K0的温漂系数可降低一个数量级,且温漂滞环可被压缩至±1 mV(±7.77 mg)以内。
硅微梳齿式加速度计;温漂;闭环点位置;滞环
硅微加速度计按照敏感元件检测方式可分为:电容式、压阻式、电感式、压电式、热对流式、谐振梁式、隧道电流式、冷原子式等[1]。与其他类型的传感器相比MEMS惯性仪表具有尺寸小、可靠性高、低功耗、低成本以及环境适应性强等优点,在民用和军事的诸多领域得到了广泛的应用[2-5]。
2011年 Draper实验室对未来加速度计技术在导航系统中的应用进行了远景分析和预测[6],硅微加速度计从传统的商业级用途正向高精度领域扩展,未来硅微加速度计将占据战术级和短时制导级应用领域,且实现远程制导级精度并在该使用领域中占有一席之地。
硅微加速度计温度漂移效应(简称温漂)始终是影响加速度计精度的关键因素[7]。受环境温度的影响,加速度计的标度因数K1和零偏K0会出现漂移变化,这成为加速度计实现高精度的瓶颈,严重制约了加速度计性能的提高,限制了加速度计的使用范围。
1 梳齿式微机械加速度计闭环点位置
1.1 加速度计闭环工作原理
梳齿式微机械加速度计闭环工作原理如图1所示。在动极板上加入预载电压和调制载波,当受到外界加速度影响时动极板偏离平衡位置而使上下差分电容发生变化,检测电路对极板差分电容进行检测,并通过PID校正后向双侧定极板施加极性相反的反馈电压,反馈电压和预载电压共同作用产生的静电合力将动极板拉回原平衡点位置并最终形成力平衡闭环系统。
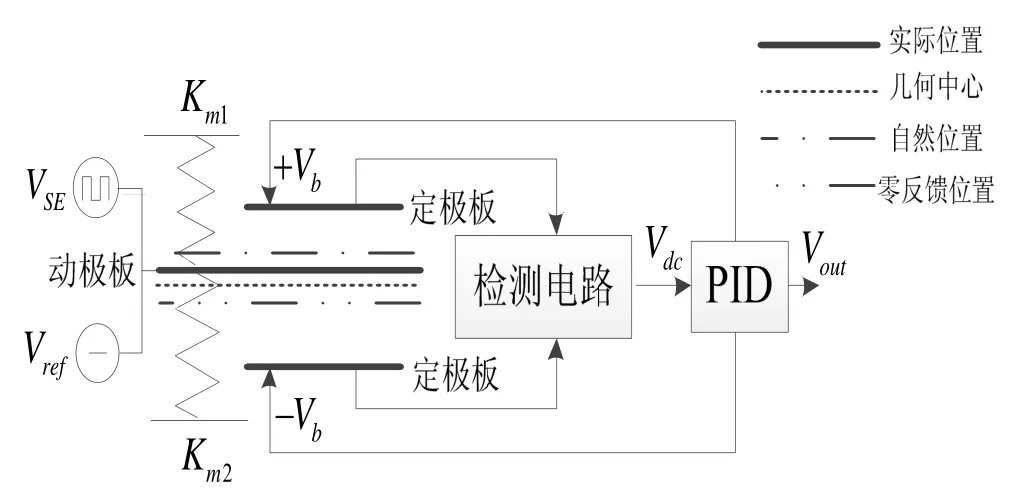
图1 梳齿式加速度计闭环工作原理图Fig.1 Close-loop principles of comb-finger accelerometer
加速度计闭环工作时系统受到的惯性力Fa、机械力Fm和静电力Fe处于平衡状态,根据力平衡公式可得:


式中,m为敏感结构质量,a为惯性加速度,KM为弹性梁的机械刚度,x为闭环点偏离几何中心的量,Δx为弹性梁自然位置与几何中心距离,n为成对梳齿数量,ε0ε为介电常数,A为极板正对面积,Vref为预载电压,Vb为反馈电压值(当反馈加力系数Kb为 1时Vb即为系统输出电压值)。
1.2 动极板闭环点位置
在闭环状态下动极板有三个特殊位置:几何中心、自然位置和零反馈位置。
几何中心是动极板位于定极板的中心对称位置。由于众多成对梳齿存在加工误差而不可能存在唯一的中心位置,因此在实际操作时几何中心为正负加速度输入时反馈输出对称的位置,即。当闭环点位置工作于几何中心时,x为0,由式(6)得式(7),即输入加速度与反馈输出成线性关系:

自然位置为 0g输入下开环无预载时动极板所处的位置,也就是两侧折叠梁所处的自然力平衡位置。当两对折叠梁结构和残余应力完全对称时,几何中心与自然位置相重合;但由于两侧折叠梁及电容梳齿不可避免的具有加工误差而难以完全一致,因此自然位置与几何中心具有一定偏离,但是这个偏移量往往较小。当加速度计闭环工作点处于自然位置时,由于系统不受梁的机械力影响,当加速度输入为0时,预载与反馈产生的静电力为0。由式(6)得式(8),在无加速度输入的0g位置下满足式(9)。
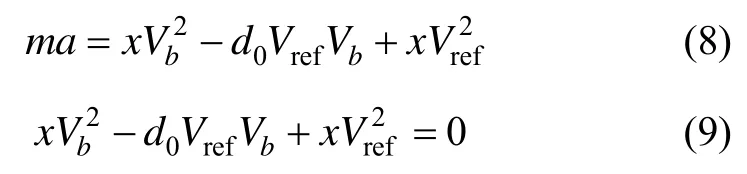
零反馈位置为 0g输入下开环加预载时动极板所处的位置,也就是预载静电力和折叠梁机械力平衡时动极板所处的位置。当闭环加速度计的闭环点位于零反馈位置时,在无外界加速度输入下,由于折叠梁机械力和预载静电力已处于平衡状态,因此无需反馈静电力即闭环输出反馈为 0。由式(6)得式(10),在无加速度输入的0g位置下满足式(11)。

2 闭环点位置的温漂移动
梳齿式微机械加速度计常用的检测电路包括:环形二极管、单载波桥式、双载波积分式、单载波双路积分式和开关电容积分式等。无论何种形式的检测电路都不同程度的具有温漂效应,当温度改变时检测电路自身会受到温度的影响带来检测输出的漂移,而这种检测漂移会造成整个系统的温漂[8-9]。
对于工作于闭环状态的加速度计,检测电路的温漂相当于在环内电容检测后加入一个偏置ΔVdc(T),这个偏置与环境温度T相关。环内加入偏置使得反馈控制系统引入额外的静电反馈,通过静电力的变化拉动动极板至新的衡点位置,这就表现为闭环点位置漂移。闭环点位置的漂移会造成系统的标度因子K1和零偏K0的温漂变化[10]。
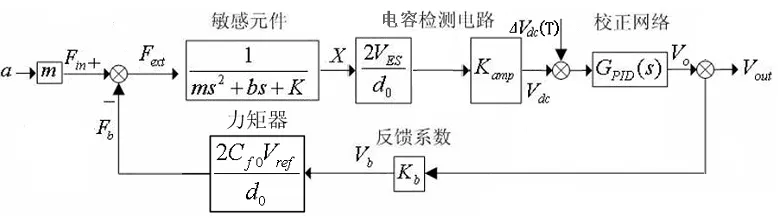
图2 闭环加速度计原理框图Fig.2 Block diagram of the close-loop accelerometer
3 闭环点位置对标度因数和零偏的影响分析
3.1 闭环点位置对标度因数K1的影响
理论上讲,利用±1g两个位置的输出测量值即可得到加速度计的线性模型,但由于系统具有非线性,因此为了得到较为精确的模型往往等间隔取多点进行试验拟合。本文试验均采用四点位置法对闭环加速度计模型进行识别。采用四点位置法的K1计算公式为:

闭环加速度计标度因子K1随闭环点位置x变化曲线如图3所示。仿真计算中实线为自然位置与几何中心相重合时,而虚线和点划线分别为自然位置向两侧偏离于几何中心开环 1g位置(偏离量为。实际情况下往往自然位置与几何中心距离较近,自然位置与几何中心偏差往往在开环输出的±0.1g位置内。常温下在闭环内加入偏置电压以测试不同闭环点位置对K1的影响。理论计算结果与试验结果相符合,且从中可以看出标度因素K1与闭环点位置x近似成抛物线形状;当自然位置与几何中心重合时,K1在该点具有最大值;当自然位置偏离于几何中心时,极值点相对于几何中心有偏移,但偏移量较小,极值点仍位于几何中心附近。可见当闭环点位置位于几何中心附近时,闭环点位置变化对K1的影响较小。
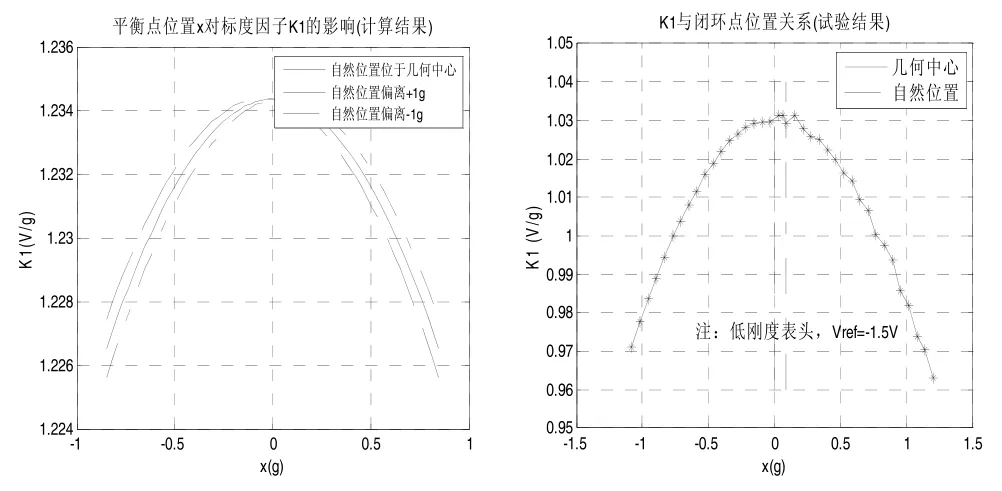
图3 标度因子随闭环点位置变化规律Fig.3 Scale factor drift in different close-loop position
3.2 闭环点位置对零偏K0的影响
用四点法位置的K0计算公式为:
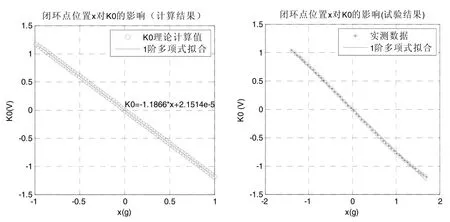
图4 零偏随闭环点位置变化规律Fig.4 Bias drift in different close-loop position
可见,当标度因子K1改变时,零偏K0也可能产生变化,因此K1对K0具有耦合作用,但是当闭环点位置位于几何中心附近时,K1的变化量较小则这种耦合影响较小。闭环加速度计零偏K0随闭环点位置变化规律如图4所示,其中横坐标为闭环点所处位置x等效成开环时的输出加速度,纵坐标为零偏K0。理论计算结果与试验结果相符合,且从中可以看出零偏K0与闭环点位置x近似一阶线性,且随着闭环点位置偏离于几何中心,非线性偏离程度增强,这是由于K1耦合因素逐渐增大的结果。
4 基于闭环点位置控制的温漂抑制方法及试验验证
4.1 闭环点位置控制方法
从上述分析可知,即使加速度计初始工作于某一特定位置时,由于检测电路的温漂闭环点位置也会产生漂移。对于闭环点位置控制的核心思想是在不同温度下,在环内加入不同的补偿控制电压Vc(T),将闭环点拉回原平衡位置,抑制由闭环点移动带来的系统输出温漂。闭环点位置控制电路框图如图5所示。
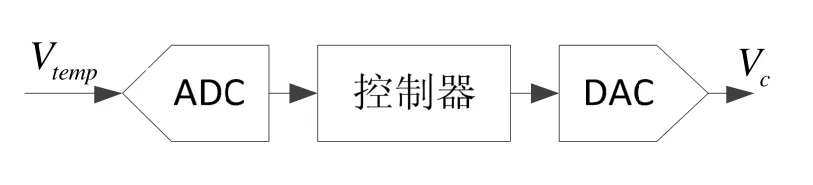
图5 控制电路框图Fig.5 Block diagram of control circuit
4.2 补偿控制电压的获取
加速度计在某一温度点下保温2 h后,系统达到热平衡且温漂不再变化,进行翻转试验当分别输入± 1g加速度时系统输出的改变量相同,则此时闭环点位于反馈施加静电力对称位置,即为几何中心。由于位于几何中心的控制电压需要在每个定点温度下多次的调整和尝试,且基于离散点进行拟合的连续曲线也与实际有较大误差,因此闭环点位于几何中心的情况仅在定点温变试验中进行作为对比。由于几何中心的控制电压无法连续获取,因此无法进行连续温变下闭环点位置控制于几何中心的试验。
将加速度计的环路打开且去掉预载电压,在 0g位置下对加速度计开环进行温度循环试验,测试开环输出Vdc。此时无外界加速度输入且无预载和反馈静电力,折叠梁处于自然状态,动极板位置位于自然位置。在加速度计闭环状态下,电容检测输出端应始终为0,当在环内此处加入补偿电压时,则根据闭环原理开环检测输出端保持输出,则动极板始终位于自然位置。
同样将加速度计的环路打开且加入预载电压,在0g位置下对加速度计开环进行温度循环试验,此时无外界加速度输入且梁的机械力和反馈的静电力平衡,则此时的Vd′c即为保证动极板始终位于零反馈位置的开环输出电压。
4.3 定点温变试验结果
将加速度计放入带有转台的温箱内,在 60℃、45℃、30℃、15℃、0℃、-15℃、-30℃和-40℃每个温度点下都保温2 h,使系统达到充分的热平衡,在每个温度点下按照环内温漂补偿方法对以下四种情况进行试验:①不加入补偿电压(参考端接地);②加入补偿电压使闭环点始终工作于几何中心;③加入补偿电压使闭环点始终位于自然位置;④加入补偿电压使闭环点始终位于零反馈位置。图6为四种情况下的各温度点的标度因数K1和零偏K0值。
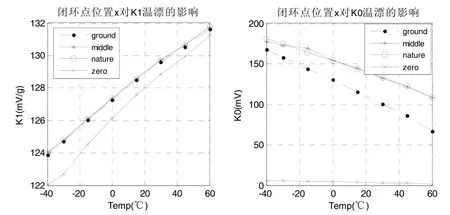
图6 定点温度试验补偿结果Fig.6 Compensation result of fixed temperature test
详细结果如表1所示,可以看出前三种情况下的K1温漂规律几乎相同,这是因为接地和自然位置都靠近于几何中心,闭环点位置的变化对K1的影响较小;当闭环点始终位于零反馈位置时,K1的温漂比其余三种情况要略大,且温漂变化率从约 6×10-4/℃上升为7.133×10-4/℃。这是由于零反馈位置相对于其他三个位置更加偏离于几何中心,与其他位置相比闭环点移动对K1的影响也较大。当闭环点始终工作于零反馈位置时,零偏K0也始终位于0附近且温漂仅有0.361 mg/℃,与其他三种情况相比闭环点位置始终位于零反馈位置的K0温漂系数降低了一个数量级,实验证明该方法可以极大的抑制和降低K0温漂。
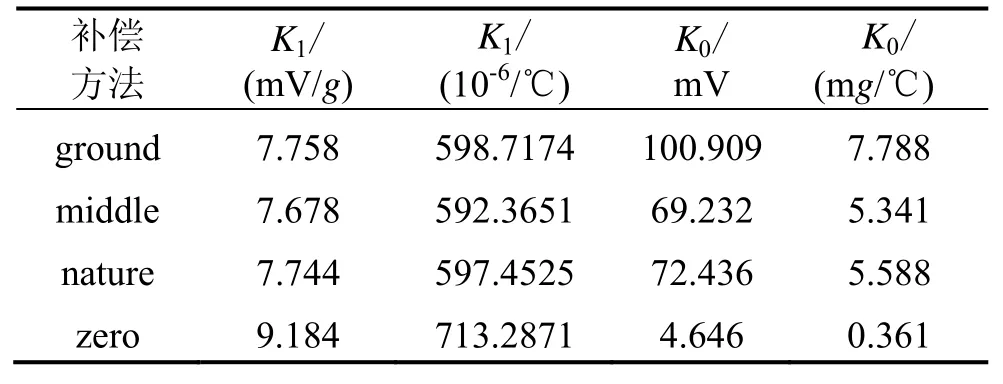
表1 不同补偿方法的试验结果Tab.1 Test result of different compensation methods
4.4 连续温变试验结果
将加速度计放入温箱内进行-40℃~60℃的连续温升温降试验[11],温变速率为1℃/min,且在-40℃和60℃分别保温2 h。对如下三种情况进行试验:①不加入补偿电压(参考端接地),②闭环点始终工作于自然位置,③闭环点始终工作于零反馈位置。由于环境温度是在连续变化的,而标度因子K1测试需要进行翻转试验,在翻转过程中连续的温度变化会造成很大的误差,因此本试验仅对零偏K0进行测试和对比。
1)控制电压
在0g位置下,分别对加速度计进行开环无预载和开环有预载的连续温循环试验,得到的开环温漂曲线如图7所示。根据无预载和有预载的开环温漂曲线,即可拟合出使加速度计保持在自然位置和零反馈位置的控制电压。
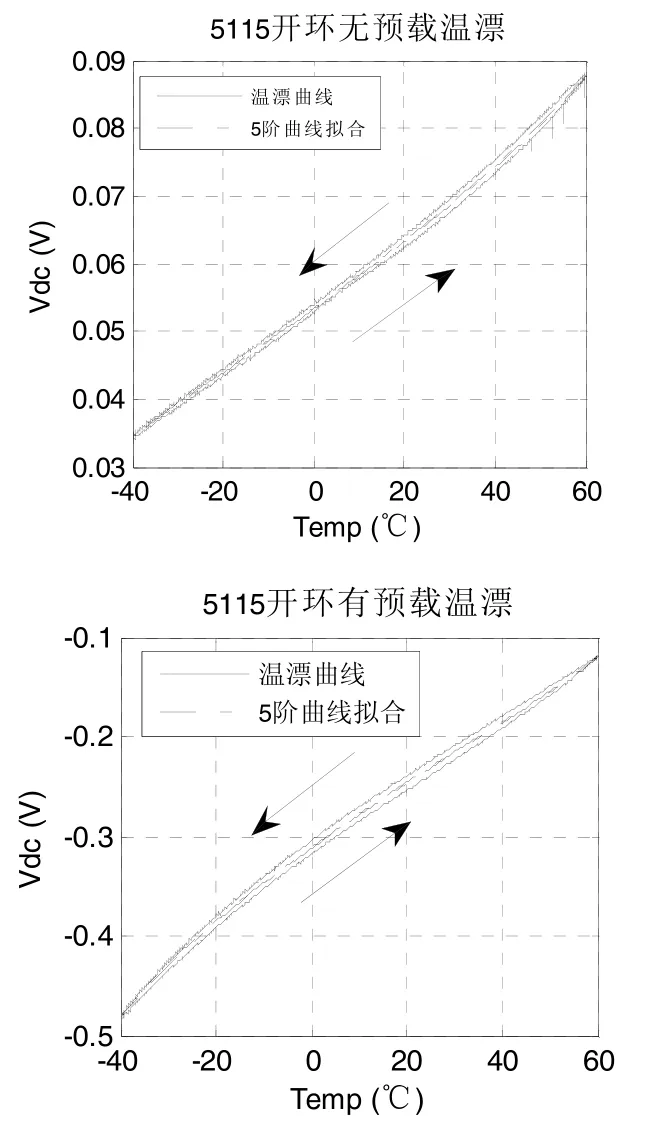
图7 加速度计开环温漂Fig.7 Thermal drift of open-loop accelerometer
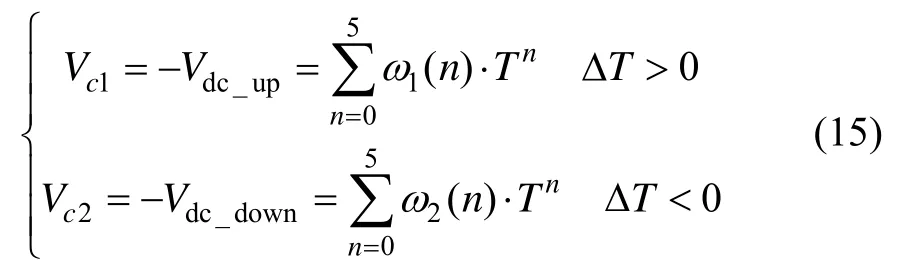
对加速度计开环温漂曲线利用5阶多项式进行拟合,可得到开环输出温漂规律如下:

式中,ω(n)为多项式拟合系数,T为当前温度值。
从开环试验结果中可以看出,在升温和降温阶段曲线出现了滞环现象,则此开环温漂滞环也会造成闭环加速度计的零偏温漂滞环。而直接根据温度值进行5阶多项式拟合则无法反映出滞环规律,因此可对温升和温降的不同温变过程分别进行拟合:
2)无滞环补偿的闭环点控制
利用公式(14)拟合控制电压并对加速度计的闭环点进行控制,试验结果如图8所示。从试验结果中可以看出:无补偿的全温零偏K0温漂为 115.65 mV(892.23 mg),且利用5阶多项式补偿后该温漂具有约±2 mV(±15.4 mg)的滞环;闭环点始终位于自然位置时全温零偏K0温漂约为82.88 mV(639.43 mg),且利用5阶多项式补偿后该温漂具有±2 mV(±15.4 mg)的滞环;闭环点始终位于零反馈位置时全温零偏K0温漂仅为6.829 mV(52.687 mg),且具有±3 mV(±23.3 mg)的滞环。

图8 无滞环补偿的闭环点控制温漂试验结果Fig.8 Thermal drift under close-loop position control without hysteresis compensation
3)具有滞环补偿的闭环点控制
利用式(15)拟合控制电压,在对加速度计的闭环点进行控制时,通过判断温变过程为升温或降温来选用不同的控制曲线,以此补偿温漂滞环,试验结果如图9所示。从试验结果中可以看出:闭环点始终位于自然位置时的温漂滞环由±2 mV(±15.4 mg)下降为±1mV(±7.77 mg);闭环点始终位于零反馈时滞环由±3 mV(±23.3 mg)下降为±1 mV(±7.77 mg)以内。

图9 具有滞环补偿的闭环点控制温漂试验结果Fig.9 Thermal drift under close-loop position control with hysteresis compensation
5 结 论
梳齿式微机械加速度计温度漂移效应始终是影响其综合精度的最关键因素,标度因数K1温度稳定性和零偏K0温度稳定性成为加速度计在高精度领域使用的瓶颈。加速度计检测电路受到温度的影响具有温漂现象,这会造成闭环加速度计闭环点位置的漂移,而闭环点位置的改变会导致K1和K0的变化。
对不同闭环点位置下的加速度计标度因数K1和零偏K0的进行了理论分析和计算,并通过人为加入偏置电压的方法对不同闭环点下的K1和K0进行了试验,试验结果与理论结果相符合。闭环点位置与K1的曲线类似于抛物线,且K1的极值点位于几何中心附近;当闭环点工作于几何中心附近时,闭环点位置的变化对标度因数K1的影响较小;闭环点位置与K0近似于一阶线性;当闭环点位置改变时零偏K0会产生很大的漂移,闭环点位置的变化是造成零偏K0温漂的主要因素之一。
提出了加速度计闭环点位置控制方法,通过在加速度计环内加入控制电压使得在温度改变时闭环点始终处于稳定位置。试验结果证明,该方法可稳定控制加速度计闭环点位置。定点温变试验结果表明,与其他闭环点位置相比零反馈位置时的加速度计标度因数K1温漂系数虽然由6×10-4/℃上升为7.133×10-4/℃,但零偏K0的温漂系数从7 mg/℃降低到0.361 mg/℃。连续温变试验结果表明,具有滞环补偿的闭环点控制更可将零偏K0的温漂滞环压缩在±1 mV(±7.77 mg)以内。
(References):
[1]董景新.惯性仪表——微机械加速度计[M].北京:清华大学出版社,2002.
[2]Barbour N M.Inertial navigation sensors[J].NATO RTO Lecture Series,2004,232(5):5.2-5.3.
[3]Hopkins R E,Barbour N M,Gustafson D E,et al.Miniature inertial and augmentation sensors for integrated inertial/GPS based navigation applications[R].NATO RTO Lecture Series,2009:7.1-7.28.
[4]Edu I,Obreja R,Grigorie T.Current technologies and trends in the development of gyros used in navigation applications-a review[C]//Proc.of WSEAS Int.Conf.on Communications and Information Technology.2011:63-68.
[5]Schmidt G T.INS/GPS technology trends[R].NATO RTO Lecture Series,RTO-EN-SET-116,Low-Cost Navigation Sensors and Integration Technology,2011:1-24.
[6]Dong Y,Zwahlen P,Nguyen A M,et al.Ultra-high precision MEMS accelerometer[C]//2011 16th International Conference on Solid-State Sensors,Actuators and Microsystems.IEEE,2011:695-698.
[7]Barbour N M.Inertial navigation sensors[J].NATO RTO Lecture Series,RTO-ENSET-116(2011).NATO Research and Tech.Org.,2011:2.1-2.28.
[8]Lajevardi P,Petkov V,Murmann B.A ΔΣ interface for MEMS accelerometers using electrostatic spring-constant modulation for cancellation of bondwire capacitance drift[C]//2012 IEEE International Conference on Solid-State Circuits.2012:196-198.
[9]胡淏,董景新,万蔡辛,等.二极管电容检测用于微加速度计的误差分析[J].清华大学学报(自然科学版),2008,48(11):1908-1910.HU Hao,DONG Jingxin,WAN Caixin,et al.Error analysis of capacitance detector diodes in micro machined accelerometers[J].J Tsinghua Univ (Sci&Tech),2008,48(11):1908-1910.
[10]Fan D,Liu Y,Han F,et al.Identification and adjustment of the position and attitude for the electrostatic accelerometer′s proof mass[J].Sensors and Actuators A:Physical,2012,187:190-193.
[11]徐哲,刘云峰,董景新.MEMS加速度计温漂预测补偿模型[J].中国惯性技术学报,2012,20(5): 601-604.XU Zhe,LIU Yun-feng,DONG Jingxin.Thermal drift prognosis and compensation model of MEMS accelerometer[J].Journal of Chinese Inertial Technology,2012,20(5):601-604.
Thermal drift reduction of comb-finger micromechanical silicon accelerometer based on close-loop position control
XU Zhe1,2,LIU Yun-feng1,DONG Jing-xin1
(1.State Key Laboratory of Precision Measurement Technology and Instruments,Department of Precision Instrument,Tsinghua University,Beijing 100084,China;2.Army Aviation institute,Beijing 101121,China )
The output of accelerometer detection circuit is affected by the change of ambient temperature,so the proof-mass may deviate from the original close-loop position.In this paper,the impacts of the deviation on the scale factor and bias are analyzed.The results show that the close-loop position drift is the main factor for causing the thermal drift of biasK0,and is the secondary factor for causing the thermal drift of scale factorK1.A method based on close-loop position control is proposed.The close-loop position is stabilized in a fixed position by adding control voltage to inner loop.The test results indicate that the thermal drift of the bias is dramatically reduced by means of the close-loop position control.The thermal drift coefficient of the bias in zero-feedback position is decreased by an order of magnitude.The hysteresis is depressed to ±1 mV(±7.77 mg).
comb-finger micromechanical silicon accelerometer;thermal drift;close-loop position;hysteresis
U666.1
:A
1005-6734(2014)01-0114-06
10.13695/j.cnki.12-1222/o3.2014.01.023
2013-09-26;
:2013-11-25
总装“十二五”预研项目(513090203**)
徐哲(1981—),男,博士生,从事MEMS惯性仪表研究。 E-mail:xu-z10@mails.tsinghua.edu.cn
联 系 人:董景新(1948—),男,教授,博士生导师。 E-mail:dongjx@mail.tsinghua.edu.cn