大方位失准角下舰载机快速传递对准技术
2014-07-19杨功流王丽芬袁二凯乔立伟
杨功流,王丽芬,袁二凯,蔡 玲,乔立伟
( 1.北京航空航天大学 仪器科学与光电工程学院,北京 100191;2.惯性技术国防重点实验室,北京 100191;3.天津航海仪器研究所,天津 300131 )
大方位失准角下舰载机快速传递对准技术
杨功流1,2,王丽芬1,2,袁二凯1,2,蔡 玲3,乔立伟3
( 1.北京航空航天大学 仪器科学与光电工程学院,北京 100191;2.惯性技术国防重点实验室,北京 100191;3.天津航海仪器研究所,天津 300131 )
为解决舰载主惯导与机载子惯导之间大失准角问题,同时满足对准快速性的需求,提出了从舰载机进入弹射位置开始,到舰载机飞离甲板时间内,基于虚拟惯导(VINS),综合利用舰载主惯导信息、跑道航向信息以及激光多普勒测速仪(LDV)信息,利用速度匹配方法实现舰/机惯导传递对准的方法,并建立了传递对准误差模型。该模型利用舰艇坐标系与跑道坐标系之间的方向余弦矩阵,将舰载坐标系与机载坐标系之间的大失准角问题,转化为机载坐标系与跑道坐标系之间的小方位失准角问题。考虑弹射过程舰艇及舰载机的运动模型,利用数学仿真对传递对准误差模型进行了验证,并与UKF滤波方法进行了对比。仿真结果表明,该方法可以在8 s内实现舰/机惯导的传递对准,对准性能与UKF滤波方法相当,且对准过程不需要舰艇进行任何机动运动。
舰载机;弹射起飞;传递对准;速度匹配;大方位失准角
从理论上讲,舰载机在停机坪待命、弹射起飞过程中以及空中飞行时均可以对机载惯导进行初始对准。目前国外对舰载机相对舰艇静止时以及舰载机空中飞行时的初始对准(本文分别称之为甲板对准和空中对准)均有所研究[1-6],并取得了一定成果。利用GPS的高精度信息对机载惯导进行空中对准是西方国家目前采用的基本手段,但当GPS受干扰时,机载惯导的对准精度将受到影响,甚至对准失败。我国多数学者主要针对甲板对准开展研究工作,其研究的问题主要集中在如何提高对准快速性、抑制杆臂效应和挠曲变形误差,以及利用非线性滤波解决大方位失准角等方面。
舰载机弹射过程中存在较大的加速度,其最大值甚至可以达到3g以上[7],对缩短对准时间,提高对准精度十分有力,因此相对于甲板上对准以及空中对准而言,弹射过程中进行舰/机惯导传递对准(称之为弹射对准)的方法更有利于实现舰载机的快速起飞,提高舰艇的作战效能。
本文在考虑基准信息来源,弹射时间约束及大失准角等影响条件下,对基于速度匹配的舰/机惯导传递对准方法进行研究。
1 舰载机弹射过程中传递对准方案
在弹射过程中进行传递对准,可以综合利用舰载机处于弹射位置以及弹射过程中的信息,这是因为,当舰载机处于弹射位置时,即使舰艇没有任何机动,一般情况下也可以实现对水平失准角的估计;当舰载机沿弹射轨道滑跑时,舰载机的大机动有利于对航向失准角的估计,因此将两种状态相结合,更利于对准速度的提高。
当舰载机处于弹射位置时,其相对航母是静止的,理论上可以利用舰/机惯导系统的各种输出信息进行传递对准;当舰载机处于滑跑状态时,仅舰载机与航母的相对位置、速度以及航向存在一定的联系,因此对准时可利用的基准信息仅限于上述三类,而位置匹配方法的对准时间较长,在舰载机滑跑阶段几乎不能完成对准。因此,在弹射中实现舰/机惯导对准的匹配方法仅限于速度匹配或“速度+航向”匹配方法。
舰载机弹射方式不同,对传递对准方法的选择也有影响。舰载机弹射过程中的拖拽方式经历了从拖索弹射到前轮拖拽弹射[8-9]的变迁,本文基于目前主流的前轮拖曳弹射方式研究舰/机惯导传递对准方法。由于前轮拖拽弹射方式允许舰载机在进入弹射位置时存在一个小于1.7°的偏心角,同时在滑跑过程中,该偏心角的存在使得舰载机会出现基于跑道基准线的偏航振动,舰/机惯导之间不规律的航向变化使舰艇主惯导的航向信息不能作为基准信息用于传递对准。综上分析,本文采用速度匹配方法实现对舰/机惯导的传递对准。
由于跑道方位可能与舰艇航向存在较大的角度差,因此舰载机处于弹射位置,利用主惯导实现传递对准时,容易出现大失准角的情况。本文提出基于VINS的传递对准方法,即传递对准中的主惯导不再是舰载惯导,而是由各种信息组成的虚拟惯导系统。其初始水平姿态及初始速度信息为舰载惯导的相应信息,初始航向角为跑道航向,运动中速度为舰载惯导速度信息与激光多普勒测速仪测量的速度信息的合成。在粗对准阶段,将VINS信息赋值给子惯导,精对准过程中基于速度匹配方法利用卡尔曼滤波器对子惯导的姿态失准角进行估计,实现传递对准。这样将大失准角引起的非线性问题转换为可以利用传统卡尔曼滤波处理的线性问题。
为了验证本方法的有效性,对比了本方法与UKF非线性滤波方法的对准性能。仿真结果表明,两种方法的对准性能相当,但本文的方法计算量要小于UKF方法。
2 速度匹配传递对准误差模型
实现弹射中舰/机惯导的传递对准必须考虑对准时间、舰载机运动、基准信息精度与品质以及各种干扰误差影响等,上述因素决定了传递对准方案的选择及所能达到的对准性能。
2.1 坐标系定义
本文研究中涉及以下几个坐标系:惯性坐标系i,地球坐标系e,导航坐标系n,子惯导计算导航坐标系n′,舰载坐标系m,机载坐标系s,跑道坐标系p。除i系和e系外,其余坐标系的关系如图1所示。
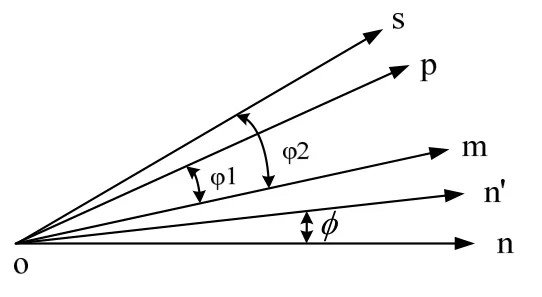
图1 各个坐标系之间的关系Fig.1 Relationship between the coordinate systems
部分坐标系定义如下:导航坐标系n取当地地理坐标系,即东北天坐标系;舰载坐标系m的坐标原点在舰艇中心,x轴、y轴与z轴相互垂直并符合右手定则,分别指向船体的右弦、船艏及天向;机载坐标系s的坐标原点在舰载机机体中心,x轴、y轴与z轴相互垂直并符合右手定则,分别指向舰载机的右侧、机头及天向;跑道坐标系p的定义与舰载坐标系相似,不考虑倾斜角时,其x轴和y轴均分别与m系的x轴和y轴在同一平面内并相差固定的角度,此角度的大小取决于跑道方向与舰艇中轴线的夹角,p系的z轴与m系的z轴重合。
以下研究中,假设主惯导已精确对准;舰载主惯导的载体坐标系与舰载坐标系重合,机载惯导的载体坐标系与机载坐标系重合;舰载坐标系与跑道坐标系之间的夹角φ1非小角度,但为已知量,跑道坐标系与机载坐标系之间的夹角为小角度;计算导航坐标系n′与导航坐标系n之间的夹角为计算失准角。

由于:
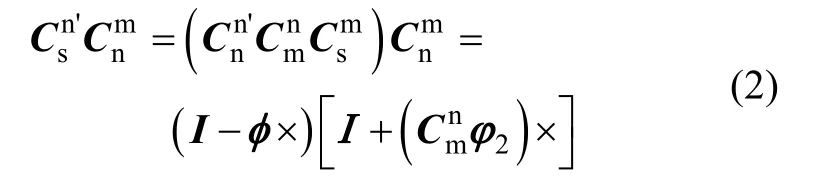
忽略二阶小项,由式(1)、式(2)得:

2.1 传递对准线性误差模型
基于上述坐标定义及假设,推导速度匹配的对准误差模型。同时由于粗对准时将赋值给子惯导作为解算的初值,因此,式(1)演化为:

2.2.1 速度误差模型
主、子惯导的速度微分方程分别为:
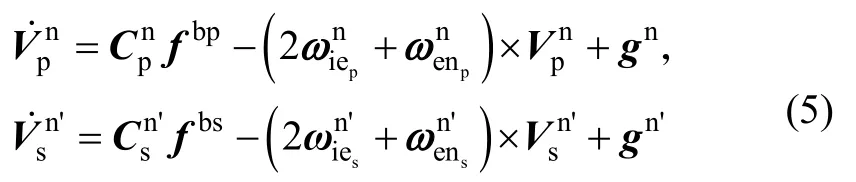
上述两式相减:

2.2.2 姿态误差模型
子惯导的姿态矩阵微分方程为:

由式(4)得式(7)左侧展开式为:
又由于式(7)右侧展开式为:

因此:

2.3 传递对准非线性误差模型
当传递对准初始时刻,利用舰载惯导作为主惯导信息赋值给子惯导时,机载子惯导航向失准角不再视为小角度,则式(1)改写为:
同时主子惯导之间安装误差相关的姿态矩阵为:
则传递对准误差模型将变为非线性误差方程。
2.3.1 速度误差模型
将主、子惯导的速度微分方程相减,得速度误差方程为:
2.3.2 姿态误差模型

计算失准角的微分形式为;

由式(1)得:

即:

综合上述推导,计算失准角的微分形式为:

3 速度匹配传递对准滤波器设计
由于传递对准时间很短,陀螺和加速度计所引起的误差较小,且短时间的传递对准很难对陀螺和加速度计误差进行估计,因此在构建滤波器时不考虑这些状态量,而通过增加相对速度误差和计算姿态误差方程中的过程噪声来补偿未建模的陀螺、加速度计测量误差。因此传递对准滤波器的状态量主要由主子惯导水平速度之差及子惯导计算失准角误差构成,即:

3.1 传递对准卡尔曼滤波器设计
利用主、子惯导系统的速度之差作为量测量,基于上文中传递对准线性模型建立卡尔曼滤波方程如下:


则:
3.2 传递对准UKF滤波器设计
利用主、子惯导系统的速度之差作为量测量,基于上文中传递对准非线性误差模型,建立UKF滤波方程如下:

式中,F和H为非线性变换函数和线性观测矩阵,W和V为过程噪声和观测噪声。观测矩阵H同上,F矩阵为由式(13)和式(18)建立。

4 速度匹配传递对准仿真
假设初始时刻舰艇的位置为经度116°,纬度40°,运动速度为10节,航向30°,水平姿态0°。假设弹射滑轨与舰艇中轴线之间的夹角为 20°,舰载机进入弹射位置后,机载惯导与舰载惯导之间的安装误差角为[0.4°,0.3°,-18°],即舰载机航向与跑道航向之间的夹角为2°。
设置传递对准过程中舰艇进行匀速、变加速等运动,运动轨迹如表1所示。各种运动状态中均存在摇摆运动,摇摆幅度及周期如表2所示。
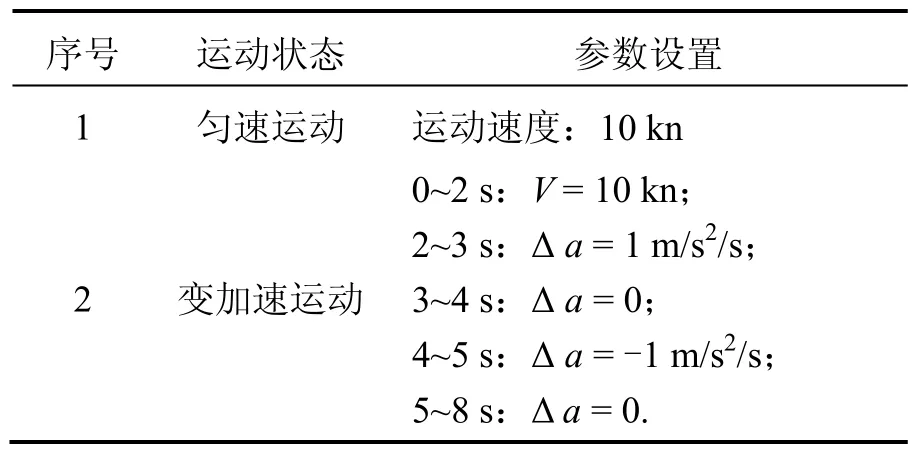
表1 舰艇运动状态Tab.1 Ship motion states
由于舰载主惯导采用高精度惯导系统,可认为其输出无误差,机载子惯导为中低精度惯导系统,假设其陀螺漂移为 0.05 (°)/h,加速度计精度为 100 μg。设定仿真步长为0.01 s,仿真时间为8 s,其中舰载机在弹射位置停留5 s,弹射滑跑过程3 s,弹射中舰载机相对舰艇的运动加速度变化如表3所示。
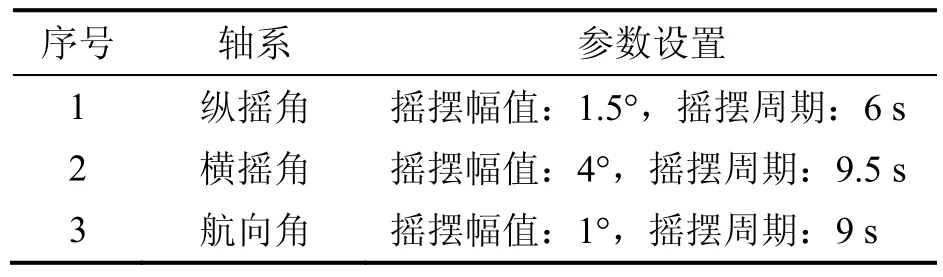
表2 舰艇摇摆状态Tab.2 Ship swing states
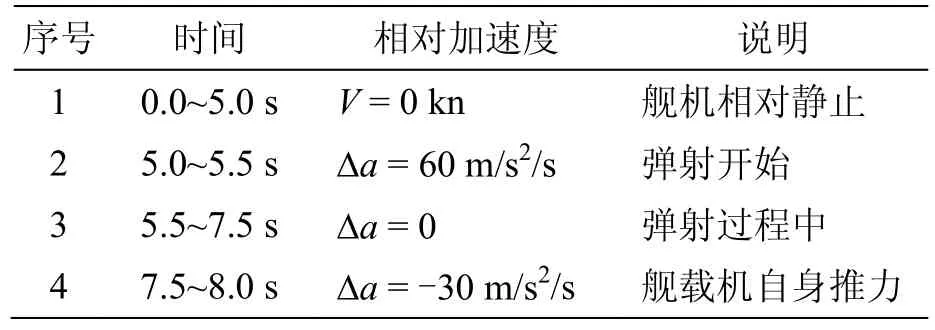
表3 舰机相对运动状态Tab.3 Relative motion states of the aircraft carrier and the carrier aircraft
舰艇匀速运动状态下,舰/机惯导传递对准仿真结果如图2所示,图中各条曲线均为传递对准中子惯导航向姿态估计误差曲线。
图2中,KF即卡尔曼滤波方法,是本文利用跑道航向信息将非线性误差模型简化为线性误差模型后采用的滤波方法。该方法中,将舰艇水平姿态及跑道航向作为初始姿态信息赋值给子惯导,因此航向失准角为2°左右。UKF滤波方法为采用舰载主惯导与机载惯导进行传递对准时使用的非线性滤波方法。
从仿真结果来看,KF滤波方法对子惯导失准角的估计精度和估计速度与UKF滤波方法相当。同时可以看出,舰机相对运动可以使航向角误差曲线迅速收敛。
舰艇变加速运动状态下,舰/机惯导传递对准仿真结果如图3所示。
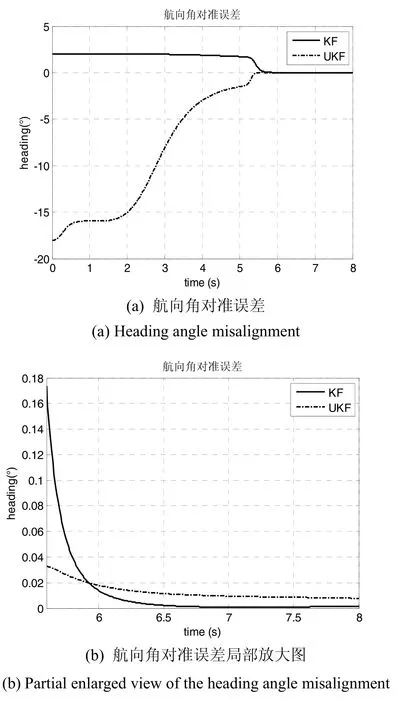
图2 匀速运动状态下传递对准结果Fig.2 Transfer alignment results under the state of uniform motion
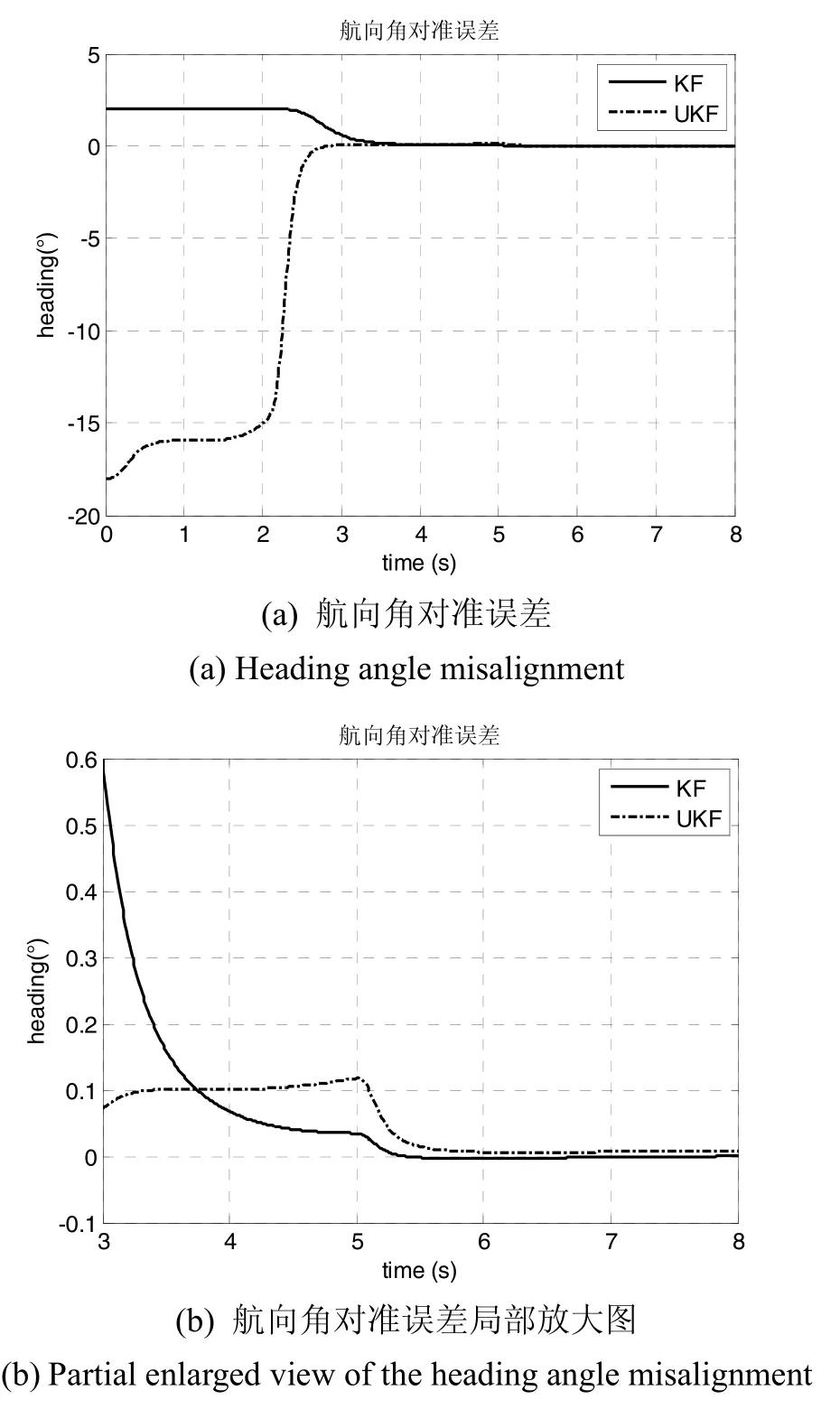
图3 变加速运动状态下传递对准结果Fig.3 Transfer alignment results under the state of varying acceleration motion
从图3所示仿真结果可以看出,舰艇的变加速运动有利于航向失准角的收敛,而舰、机相对高速运动提高了其收敛精度。同时可以看出,变加速运动情况下,KF滤波方法对子惯导失准角的估计精度和估计速度也与UKF滤波方法相当。
不同运动状态,不同滤波方法下对准性能如表 4所示。

表4 舰载机姿态角估计误差Tab.4 Estimation error of the carrier aircraft’s attitude angle
从表4中可以看出,匀速运动和变加速运动中,卡尔曼滤波方法可以实现对子惯导失准角的有效估计,其估计精度优于3′,与非线性滤波方法相当。但由于UKF滤波以UT变换为基础,选取有限个Sigma采样点来近似系统状态的先验统计特性,再通过非线性方程演化系统状态的后验分布特性,一般情况下须对过程噪声和量测噪声进行状态增广,将增加滤波计算量。在高更新率要求下,该方法不利于实现舰载机的快速对准[10-13]。
同时从上表看出,航向失准角的估计精度略高于水平失准角。一方面说明舰载机的加速运动极有利于航向失准角的收敛,另一方面由于舰载机开始弹射时加速度瞬间增大,导致速度误差量会出现瞬时跳变,水平失准角的估计精度会受到一定影响。
5 结 论
本文对弹射过程中舰载机惯导快速对准方法开展研究,针对舰、机惯导之间的大失准角问题,提出了利用跑道航向信息,将舰、机惯导之间大方位失准角问题转换为舰载机惯导与跑道方位之间小失准角的对准方法。研究得到的主要结论如下:
1)舰载机弹射时的高加速运动有利于提高传递对准中航向失准角的估计精度,缩短估计时间;
2)本文提出的基于跑道航向信息的传递对准方法可以实现大方位失准角下的快速对准,其对准精度与非线性滤波方法相当,但计算量远小于非线性滤波,更适用于高更新率要求下的舰载机对准;
3)舰艇匀速运动及变加速运动状态下,均可以实现舰载机传递对准,因此弹射中对准方法对舰艇运动无特殊要求;
4)舰载机开始弹射时加速度瞬间增大,信息跳变不利于舰载机惯导传递对准精度的提高,后续工作中需要进一步深入研究。
[1]Silson P M G.Coarse alignment of a ship′s strapdown inertial attitude reference system using velocity loci[J].IEEE Transactions on Instrumentation and Measurement,2011,60(6):1930-1941.
[2]Bezick S M,Pue A J,Patzelt C M.Inertial navigation for guided missile systems[J].Johns Hopkins APL Technical Digest,2010,28(4):331-342.
[3]LU Yuan,CHENG Xianghong.Random misalignment and lever arm vector online estimation in shipborne aircraft transfer alignment[J].Journal of the International Measurement Confederation,2014,47(1):756-764.
[4]WANG Xinlong,SHEN Linag.Solution of transfer alignment problem of SINS on moving bases via neural networks[J].Engineering Computations,2011,28(4):372-388.
[5]Yang Cheol-Kwan,Shim Duk-Sun.Observability analysis for transfer alignment technique considering the lever arm effect with time delay[C]//Institute of Navigation International Technical Meeting.2013:821-827.
[6]Havinga M C.Flight test results of a MEMS IMU based transfer alignment algorithm for short range air-to-air missiles[C]//AIAA Guidance,Navigation,and Control (GNC) Conference.2013.
[7]朱熠.舰载机起飞控制与仿真技术研究[D].南京:南京航空航天大学,2012.ZHU Yi.Research on control and simulation of launch technology for carrier-based aircraft[D].Nanjing:Nanjing University of Aeronautics and Astronautics,2012.
[8]马世强.弃重就轻——美国航母弹射技术变迁[J].环球军事,2006,117:53-54.MA Shuiqiang.Abandoned heavy on the light - the U.S.aircraft carrier catapult technological change[J].Global Military,2006,117:53-54.
[9]于浩,聂宏.舰载机偏中心定位弹射起飞动力学分析[J].南京航空航天大学学报,2010,42(5):537 -542.YU Hao,NIE Hong.Dynamics analysis of carrier-based aircraft with off-center catapult launch[J].Journal of Nanjing University of Aeronautics &Astronautics,2010,42(5):537-542.
[10]严恭敏,严卫生,徐德民.简化UKF滤波在SINS大失准角初始对准中的应用[J].中国惯性技术学报,2008,16(3):253-264.YAN Gongmin,YAN Weisheng,XU Demin.Application of simplified UKF in SINS initial alignment for large misalignment angles[J].Journal of Chinese Inertial Technology,2008,16(3):253-264.
[11]Dai Hongde,Zhou Shaolei,Chen Ming.Quaternion based nonlinear error model for rapid transfer alignment [J].Journal of Astronautics,2010,31(10):2328-2334.
[12]Chang Lubin,Hu Baiqing,Li An.Strapdown inertial navigation system alignment based on marginalised unscented kalman filter[J].IET Science,Measurement and Technology,2013,7(2):128-138.
[13]魏学通,高磊.大方位失准角下舰载机传递对准技术[J].中国惯性技术学报,2012,20(5):552-556.WEI Xue-tong,GAO Lei.Transfer alignment of carrierborn aircraft under large azimuth misalignment angle[J].Journal of Chinese Inertial Technology,2012,20(5):552-556.
Rapid transfer alignment of lager misalignment angle for carrier aircrafts
YANG Gong-liu1,2,WANG Li-fen1,2,YUAN Er-kai1,2,CAI Ling3,QIAO Li-wei3
( 1.School of Instrumentation Science and Opt-electronics Engineering,Beijing University of Aeronautics and Astronautics,Beijing100191,China;2.Science and technology on inertial laboratory,Beijing100191,China;3.Tianjin Navigation Instrument Research Institute,Tianjin 300131,China )
To solve the large azimuth misalignment angle problem between MINS and SINS,and shorten the transfer alignment time,a take-off alignment method of the carrier-based aircraft is put forward,and the linearization error model of transfer alignment is built in this paper.This method synthetically uses the velocity of MINS,the azimuth of the runway and the velocity of Doppler velocimeter to transfer the lager azimuth misalignment angle problem between MINS and SINS into small azimuth misalignment angle problem between aircraft coordinate and runway coordinate.Considering the motion models of the carrier-based aircraft and the aircraft carrier,the simulation is carried out by comparing with UKF.The results show that the transfer alignment can be implemented within 8 s,and the performance is equivalent to that of UKF,and there is no need to carry out any maneuver for aircraft carrier.
carrier-based aircraft;ejection take-off;transfer alignment;velocity matching;large azimuth misalignment angle
V249.32
:A
1005-6734(2014)01-0045-06
10.13695/j.cnki.12-1222/o3.2014.01.010
2013-09-12;
:2014-01-02
海军重点预研项目(401010301)
杨功流(1967—),男,教授,博士生导师,从事惯性技术研究。E-mail:bhu17-yang@139.com