一种平台惯导系统综合性能实用组合预测评判方法
2014-07-19党宏涛杜祖良王常虹
党宏涛,杜祖良,王常虹
(1.哈尔滨工业大学 空间控制与惯性技术研究中心,哈尔滨 150001;2.北京自动化控制设备研究所,北京 100074;3.解放军96117部队,莱芜 271100)
一种平台惯导系统综合性能实用组合预测评判方法
党宏涛1,3,杜祖良1,2,王常虹1
(1.哈尔滨工业大学 空间控制与惯性技术研究中心,哈尔滨 150001;2.北京自动化控制设备研究所,北京 100074;3.解放军96117部队,莱芜 271100)
平台惯导系统(PINS)长期重复性参数是评价PINS综合性能是否满足导航精度的重要因素。在PINS动态飞行条件下,采用PINS导航误差模型能够根据PINS各单项性能参数对其综合性能进行精确计算,但该方法计算时间长,在 PINS应用决策阶段不能满足快速评判的时效要求。对此提出了基于PINS导航误差模型和最小二乘支持向量机回归(LS-SVR)相结合的PINS综合性能预测方法。在PINS贮存准备阶段采用导航误差模型与LS-SVR组合方法构建PINS综合性能预测模型,在应用决策阶段采用实时预测的PINS各单项性能指标参数,运用PINS综合性能预测模型对每套PINS进行足够次数综合性能预测,使用PINS综合性能评判指标对每套PINS综合性能进行评判,可以快速得到PINS综合性能评判结果。经过计算验证,表明该组合预测方法不仅具有很高的PINS综合性能预测精度,而且有效提高了PINS综合性能预测效率和评判效果,具有很好的实际应用及评判决策价值。
PINS;导航误差 LS-SVR;综合性能;预测评判
随着我国平台惯导系统(PINS)理论研究和生产工艺的提高,PINS已进入批量生产和长期存贮阶段,PINS综合性能主要是由惯导系统长期存贮产生的重复性误差和飞行过程中产生的稳定性误差构成,其中长期贮存造成的重复性误差和初始对准误差是影响PINS综合性能的主要因素。为了确保PINS综合性能满足指标要求,需要定期对 PINS进行标定,在两次标定期间,如果对 PINS进行选择使用,一种方法是实时标定,对于多批次多型号 PINS来说,标定工作耗时耗力,不能满足评判决策的时效要求;另一种方法是需要根据其历次标定数据对 PINS重复性参数进行区间预测,然后根据预测区间和初始对准误差采用惯性导航误差模型对 PINS综合性能进行计算评判,这种方法具有计算精度高的特点,但同样需要花费大量的时间,仍然不能满足评判决策的时效要求,因此需要找到一种实用的PINS综合性能预测和评判方法,为PINS使用决策服务。
支持向量机(SVM)技术是在统计学习理论和结构风险最小化理论基础上提出的,它在模型的复杂性和学习能力之间寻求最佳折衷,以期获得最好的推广能力,是一种新型机器学习方法[1-2]。为了避开标准SVM中求解耗时费力的二次规划问题,Suykens等[3]提出了最小二乘支持向量机回归(LS-SVR),它用等式约束代替不等式约束,极大地降低了运算时间,因其具有非线性拟合、结构简单、全局最优和较好泛化能力等优点,近年来在数据分析[4-5],模式识别[6-7]、故障诊断[8-9]得到了广泛应用。
根据某型PINS实际应用背景,在PINS存贮准备阶段,采用PINS导航误差模型与最小二乘支持向量机回归(LS-SVR)进行组合建模,构建了PINS综合性能预测模型,该模型能够在PINS使用决策阶段快速对多批次多型号PINS综合性能进行高精度预测,在给定PINS综合性能评判指标时,能够对PINS综合性能进行评判,选择满足精度要求的PINS装配使用。
1 PINS导航误差模型
在不考虑椭球扁率、天向速度和高度影响的情况下,以东向、北向误差为导航精度指标,在地理坐标系下得到PINS导航误差的模型如下[10]:





2 最小二乘支持向量机回归算法

其Lagrange函数:

根据K-K-T(Karush-Kuhn-Tuker)条件,通过对Lagrange函数求偏导,获得最优解:
经同解变换消去变量ω和b,上式写成:

则得到回归预测的LS-SVR模型为:
3 组合预测模型与评判流程
3.1 PINS综合性能组合预测模型
采用PINS导航误差模型与LS-SVR方法对PINS综合性能进行组合预测,其预测模型为:
1) 在轨迹发生器上设定飞行器飞行轨迹,生成标准飞行轨迹参数;
2) 选择PINS历次标定数据的重复性误差和初始对准误差,结合标准飞行轨迹参数,利用 PINS导航误差模型计算出PINS飞行位置误差;
3) 将PINS历次标定数据的重复性误差和初始对准误差整合后分为适用于 LS-SVR方法的训练数据XT和测试数据XC,其对应的PINS飞行位置误差分为适用于LS-SVR方法的训练数据YT和测试数据YC;
3.2 PINS综合性能评判函数
PINS单项性能参数包括PINS长期重复性参数和初始对准误差,在应用决策阶段将每套 PINS单项性能参数带入PINS综合性能预测模型,得到PINS位置误差,设定PINS性能评判指标为综合位置误差P,可得到满足实际需要的PINS综合性能评判函数为:
3.3 PINS综合性能预测评判流程
PINS综合性能评判主要分为贮存准备阶段和应用决策阶段,在贮存准备阶段采用导航误差模型生成一定数量的PINS综合性能数据样本,运用LS-SVR对数据样本训练和测试后生成PINS综合性能预测模型;在PINS决策应用阶段,将PINS实时单项性能参数带入 PINS性能预测模型,根据综合评判指标对预测结果进行评判,即可得出多批次多惯导系统的决策结果。PINS综合性能评判流程如图1所示。
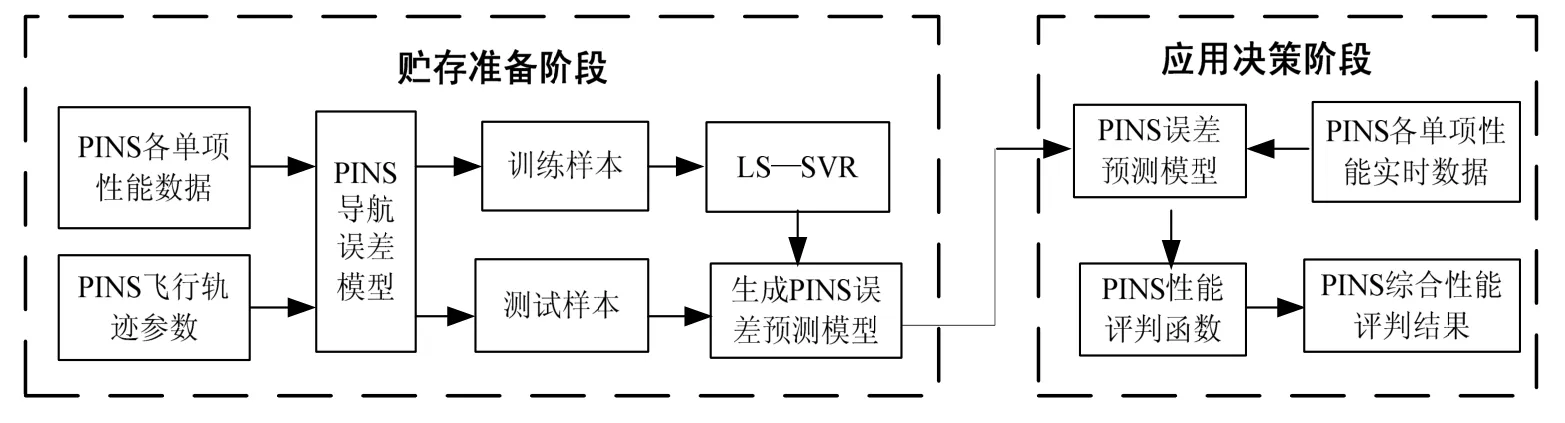
图1 PINS综合性能评判流程Fig.1 The evaluation process of comprehensive performance
4 方法验证
对于某巡航式飞行器而言,忽略其垂直方向上的速度和位置误差,考虑初始姿态对准误差和初始位置误差共5项,由惯导系统标定引起的参数重复性误差包括陀螺常值漂移、陀螺标度因数、陀螺与G有关项、加速度计零偏、加速度计标度因数、平台航向效应共计51项, PINS综合性能由东向导航误差和北向导航误差合成得到。
4.1 PINS综合性能组合预测模型验证
选取某型号PINS单项性能参数721组,使用轨迹发生器设计1 h飞行器标准飞行参数,采样时间为 0.1 s,采用 PINS导航误差模型在 MATLAB R2010a上运算得到PINS终点导航位置误差,在处理器Intel(R) Core(TM)i3,内存4GB计算机上计算时间约为46 h,任意选择621组数据为训练样本,100组数据为测试样本,核函数选择径向基核函数,核参数和惩罚参数γ选择采用网格寻优法。对应的 PINS性能预测的效果如图2所示。

图2 PINS导综合性能预测Fig.2 Comprehensive performance forecast of PINS
运用LS-SVR方法进行训练和测试,共计时间为76.8 s,北向均方误差为 0.64%,东向均方误差为0.15%,表明LS-SVR方法对PINS综合性能具有很高的拟合精度。
4.2 PINS综合性能评判验证
设定PINS综合性能评判指标为飞行器在某轨迹飞行1 h导航误差为1 nm,采用PINS综合性能评判模型,对三套编号N1、N2、N3的PINS进行综合性能评判,设定三套 PINS单项性能参数变化的均值和方差,每套产品采用正态分布随机产生100组数据,经过预测和评判,得到图3。

图3 PINS综合性能评判Fig.3 Comprehensive performance evaluation of PINS
由此可得PINS 1 h导航位置误差及其分布规律,如果按照评判指标选择PINS装配,编号N1的PINS综合性能完全满足需要,编号N2的PINS综合性能不能满足需求,编号N3的PINS满足综合性能要求的概率为0.97,则编号N1、N3的PINS可以装配使用,编号N2的PINS不能装配使用。
5 结 论
构建了基于PINS导航误差模型与LS-SVR组合的PINS长期重复性综合性能预测模型,给出了PINS综合性能评判函数和实际评判流程。在贮存准备阶段生成 PINS综合性能预测模型,在应用决策阶段对PINS综合性能进行实时预测评判。通过PINS在某飞行轨迹上的综合性能预测和评判验证,结果表明该组合预测方法具有很高的预测精度和评判效率,对PINS应用决策具有很好的预测评判价值。
(References):
[1]Vapnik V.Statistical learning theory[M].New York:John Wiley and Sons Inc.,1998.
[2]Huang K,Zheng D,King I,et a1.Arbitrary norm support vector machines[J].Neural Comput.,2009,1(2):560- 582.
[3]Suykens J A K,Gestel T V,Brabanter J D,et a1.Least squares support vector machines[M].World Scientific Pub.Co,2002.
[4]Polycarpou M M.Fault accommodation of a class of multivariable nonlinear dynamical systems using a learning approach[J].IEEE Trans.on Automatic Control,2001,46(5):756-742.
[5]Chen Gaobo,Chen Xiufang.Combining partial least squares regression and least squares support vector machine for data mining[C]//2011 International Conference on E-Business and E-Government:1-4.
[6]于湘涛,张兰,郭琳瑞,等.基于小波最小二乘支持向量机的加速度计温度建模和补偿[J].中国惯性技术学报,2011,19(1):95-98.YU Xiang-tao,ZHANG Lan,GUO Lin-rui,et al.Temperature modeling and compensation of accelerometer based on least squares wavelet support vector machine[J].Journal of Chinese Inertial Technology,2011,19(1):95-98.
[7]Jiang Shaohua,Gui Weihua.Vertical quench furnace Hammerstein fault predicting model based on least squares support vector machine and its application[C]// Control and Decision Conference.2009:203-207.
[8]Lin Xiankun,Yuan Bo.Application of hybrid PSO and LS-SVR intelligent recognition of dual linear axis dynamic synchronization error characteristics[J].Third International Symposium on Intelligent Information Technology Application,2009,Vol.3:447-450.
[9]Leung Y W,Wang Yuping.An orthogonal genetic algorithm with quantization for global numerical optimization[J].IEEE Transactions on Evolutionary Computation,2001,5(1):41-53.
[10]秦永元.惯性导航[M].北京:科学出版社,2006,245-253.
Practical combination forecasting evaluation method for PINS comprehensive performance
DANG Hong-tao1,3,DU Zu-liang1,2,WANG Chang-hong1
( 1.Space Control and Inertial Technology Research Center Harbin Institute of Technology,Harbin 150001,China;2.Beijing Institute of Automatic Control Equipment,Beijing 100074,China;3.96117 Troops,Laiwu 271100,China)
The long-term reproducibility of platform inertial navigation system(PINS) is a key parameter for evaluating whether the comprehensive performance of PINS has met the navigation accuracy.For the PINS dynamic flight,the PINS navigation error model can accurately calculate the comprehensive performance of PINS according to its individual performance parameters,but this method takes too much time and can’t meet the timeliness requirements of the rapid evaluation during decision-making stage in PINS application.Therefore,we proposed a PINS performance prediction method based on the PINS navigation error model and the least squares support vector regression (LS-SVR).By combining the navigation error model with LSSVR combination method,we can build the PINS performance prediction model in the storage preparation stage of PINS,and real-time predict the individual performance parameters in the decision-making stage of PINS.One can quickly get the comprehensive performance evaluation results by sufficient comprehensive performance prediction of each PINS using the PINS performance prediction model and the comprehensive performance evaluation of each PINS using the evaluation indicators of the PINS comprehensive performance.The calculation results verify that the combination forecasting method not only has high prediction accuracy,but also has effectively improved the prediction efficiency and evaluation quality of the PINS comprehensiveperformance.It has a good practical application and potential in evaluation and decision-making.
PINS;navigation error;LS-SVR;comprehensive performance;prediction evaluation
U666.1
:A
1005-6734(2014)01-0009-05
10.13695/j.cnki.12-1222/o3.2014.01.003
2013-06-27;
:2013-11-01
国防重点项目(61388010404)
党宏涛(1976—),男,博士生,从事平台惯导系统长期重复性综合性能评判。
联 系 人:杜祖良(1945—),男,研究员,从事惯性技术研究。E-mail:dzl_ins@163.com