一种基于Kalman滤波的卫星遥测数据判读系统
2014-07-19吴婧苏振华孙诚
吴婧 苏振华 孙诚
(航天东方红卫星有限公司, 北京 100094)
一种基于Kalman滤波的卫星遥测数据判读系统
吴婧 苏振华 孙诚
(航天东方红卫星有限公司, 北京 100094)
分析了卫星遥测数据的变化规律,提出了一种基于卡尔曼(Kalman)滤波的遥测数据判读系统框架,并定义了系统中各模块的功能及接口关系,应用卫星实际遥测数据对判读系统的数据预测效果进行了验证。结果表明,此系统对数据异常反应迅速,能够很好地满足卫星测试的实时性要求。
卫星;数据判读;卡尔曼滤波
1 引言
卫星遥测数据判读是指卫星在地面综合测试过程中,依据判读准则,对卫星控制指令、下行遥测数据进行相关性检查,判断卫星各设备工作是否正常、接口是否正确、卫星运行是否正常的过程。为了准确地把握卫星的工作状态,及时发现问题,必须对这些数据进行不间断的监视和判读。
目前,大部分卫星数据判读工作仍以人工操作为主完成,这不但需要大量具有丰富知识和经验的人员,还存在着漏判和误判的隐患[1]。卫星测试过程需要监视、检测如载荷、敏感器和执行机构等数百个部件的实时数据和状态。测试数据量庞大,信号类型复杂,数据实时性、一致性和可靠性要求高,数据随环境变化快,因此,对卫星测试系统中数据判读和处理速度等均提出了很高要求,传统的手工数据判读方法无法满足卫星测试需求[2]。为解决上述问题,目前主要使用遥测参数自动化监视工具软件,能够自动根据定义的参数范围进行数据判读,参数越界时发出报警提示,但是对于参数异常范围的定义不够精确,且严重依赖测试人员的经验。
本文提出一种基于Kalman滤波的卫星遥测数据判读系统,利用卫星当前时刻的遥测数据,实时预测下一时刻的遥测数据,能够提前发现数据的异常变化。实际测试应用中,如卫星遥测数据发生异常,某个遥测值异常攀升或下降,初期因为没有超过预先设定的门限值,测试人员无法发现测试异常。应用本系统,经过一段时间的数据积累,能够快速地给出一段时间后参数越界的报警,提醒测试人员重点给予关注,便于发现遥测数据异常的变化趋势,适用于长期数据判读和异常数据检测。
2 卫星遥测数据变化规律分析
通常,在判读卫星一个遥测参数时,主要考虑以下几方面的因素:当前遥测数据帧中的各个参数值、历史数据、相关遥控指令、飞行事件、时间等[1]。对卫星遥测数据的变化规律分析要考虑以下两种情况。
2.1数据在给定的范围内变化
数据在给定的范围内的超限判读,是通过对采集到的数据进行上下限比较就能很好地解决问题[3]。实际上,在对卫星遥测参数判断时,至少要考虑以下几种情况。
1)数据维持在一恒定值附近
在卫星设备状态未发生改变时,遥测数据平稳变化,变化率不大。此类数据主要包括特定卫星状态下的电压、电流、温度参数等。例如,红外地球敏感器电机电流值、惯性姿态敏感器温度值、惯性姿态敏感器电源状态等遥测参数。
2)无遥控指令、飞行事件发生而数据有变化
在没有遥控指令、飞行事件发生时,遥测数据突然发生变化或缓慢变化。此类数据主要包括不受遥控指令、飞行事件影响的一些参数。出现此种情况时,很可能是异常,应重点关注。
3)与遥控指令相关联的数据
当地面或卫星上发出某个指令或指令集的时候,相应的参数发生变化,该类遥测参数是否异常的判断准则可能发生改变,应按新的判读知识进行判断。例如,地面发出运行姿态机动模式遥控指令,卫星判断指令无误后开始执行指令,控制分系统工作模式会发生变化,同时,相关执行机构开始动作,即执行机构工作状态会发生变化,各敏感器姿态测量数据同时也会发生变化,而当卫星机动到位后,执行机构和敏感器数据会稳定在一定的范围内。参数新的变化范围与原来会有一定的差别,这属正常情况,只是指令注入前后判断准则不同。
4)与飞行事件相关联的数据
某种飞行事件发生后,相关的遥测参数发生变化。例如,在卫星由地影区进入光照区时,太阳翼输出电流会产生突变,数字太阳敏感器全开码和监视码遥测也会产生突变。再如,某卫星飞行程序设定在星箭分离30 min后,当卫星姿态角和姿态角速度满足一定条件后自主启动动量轮,动量轮控制电压会产生突变,动量轮转速会逐渐增加,动量轮电机电流也会增加,并且对卫星姿态会造成一定程度的扰动,然后动量轮转速稳定在标称值附近。此情况与情况3)基本相似,但参数会在此点上进行突变,属正常情况,只是事件发生前后判断准则不同。
2.2数据按某种趋势变化
卫星有些遥测数据是按照某种规律进行变化的,但是这种变化规律不是简单的上升或下降,它还包括沿着某种函数曲线变化[1]。例如,星敏感器、数字太阳敏感器的实时姿态测量数据随卫星姿态和位置发生变化,以轨道周期按照一定的规律变化。
3 基于Kalman滤波的预测方法
Kalman滤波[4-6]是以最小均方误差为准则的最佳线性估计,它根据前一个估计值和最近一个测量数据来估计信号的当前值,利用状态方程和递推方法进行估计,而且得到的解也是以估计值的形式给出的,能很好地应用于处理多变量系统[7-9]、时变线性系统及非线性系统的最佳滤波等。本节对Kalman滤波算法进行介绍,并将其用于对遥测数据的预测。
3.1遥测数据与时间关系的回归模型
将遥测数据用x表示,不失一般性,设该参数与时间t可用非线性函数表示为
(1)
根据遥测数据特点,在有限时间内,考虑到平稳过程中还受环境变化的影响,遥测数据用时间2阶Taylor展开近似,设遥测数据采样时间间隔为Δt,则可得
(2)

3.2系统状态方程及观测方程
根据3.1节分析,由式(2)可得遥测数据的状态方程描述:
(3)
观测方程记为
(4)

3.3遥测数据预测
在建立遥测数据模型方程式(3)和式(4)的基础上,遥测数据Xk+1的最佳估计可以由下面的Kalman滤波方程组给出。
Kalman滤波器的状态更新方程如下:
(5)
(6)
测量校正方程如下:
(7)
(8)
(9)

基于Kalman滤波的遥测数据预测步骤如下:

(3)利用由式(6)求得的预测误差方差阵,进而利用式(7)计算Kalman滤波器增益矩阵Kk+1;

4 遥测数据判读系统框架设计
基于Kalman滤波的卫星遥测数据判读系统实时接收卫星的遥测数据,同时能够查询历史遥测数据库,运用第3节所述预测方法进行数据预测,并根据专家测试库[10]的知识内容将预测结果输出给遥测数据判读系统,进而实现卫星遥测数据判读。系统的输入输出接口关系以及框架设计如图1所示。

图1 基于Kalman滤波的卫星遥测数据判读系统接口关系及系统框架
4.1预处理模块
卫星实时下传的遥测数据可能存在着不连续、跳码等非平稳现象,预处理模块要对遥测数据进行处理,从中选择有效的数据。另外,由于星上设备通常是自主运行的,并且遥测数据产生具有一定的时间特性(如按采集周期产生),因此需要对遥测数据的产生时间进行分析,判断该数据的产生时间是否正确[2],如果存在异常,则通过监控终端提交测试人员确认。同时对历史遥测数据进行标准化处理,按一定的周期进行采样,为实时预测模块提供特定时间间隔的数据。
4.2实时预测模块
实时预测模块基于Kalman滤波和相关历史遥测数据,运用第3节所述预测方法进行数据预测,输出预测结果至数据判读模块,是遥测数据判读系统的核心模块。本模块要满足以下功能:
(1)可自动再次对遥测数据进行分析、学习,并根据状态和飞行事件变化具有重新累积数据和重新预测的功能;
(2) 对预测值与实际遥测数据进行比较,若差值大于一定的限度(此值可设定,设定值应注意防止虚报警)时,应通过监控终端给出提示;
(3)具有系统默认配置的功能,也可以提供手动配置,事先人工干预,调整预测算法的配置参数等。
4.3数据判读模块
数据判读模块根据专家测试库的知识内容,判断卫星实时下传的遥测数据是否正常,是否报警,以及卫星的测试状态是否合理。如发现异常,即通过监控终端向测试人员发出报警信号并显示报警原因。
4.4专家测试库
专家测试库主要包括测试数据的正常值(稳定工作的数据范围)、报警值(正常工作值的下限和上限)、开机值、相关遥测(用于多个测试数据联合判断)、相关控制命令(遥控指令、测试设备控制指令、卫星上行注数等)正确执行后的遥测数据值,以及判断时间和测试中允许的卫星状态等信息。
4.5模拟数据产生模块
模拟数据产生模块按照用户的配置,产生特定变化规律的模拟数据或对实际数据进行修改产生模拟数据,然后输入到实时预测模块,对预测值与实际值进行比对,用于验证系统的功能正确性。
4.6监控终端
监控终端是人机接口,显示界面应直观、醒目,其图形化状态显示界面应反映卫星各分系统的组成与工作状态、各部分间的联系与控制关系、信息信号流向、所定义的参数配置和信息输出,同时要嵌入报警系统的输出信息窗口。
5 应用验证
利用某卫星控制分系统陀螺组件发生故障期间的实际遥测数据,对数据判读系统的应用效果进行了验证。该卫星陀螺组件由4个单自由度液浮陀螺仪组成,其中3个陀螺的输入轴两两相互垂直,形成正交的X、Y、Z测量坐标系,成为X、Y、Z陀螺;第4个陀螺为斜装式,成为S陀螺。
2013年4月5日,某卫星控制分系统加电进行整星热平衡试验低温第一个工况。控制分系统加电后自主开启陀螺加温电路,X、Y、Z、S陀螺温度遥测值大于2 V后可以注入遥控指令开启陀螺马达。测试中发现,Z陀螺温度遥测值仍然没有稳定,由正常的2.5 V左右逐渐上升到5 V,其他遥测数据均正常。使用遥测数据判读系统的预测效果如图2所示,红色曲线为实际遥测数据,绿色曲线为预测数据。由图2可见,预测数据与实际数据的变化趋势基本吻合,预测曲线能提前于实际数据变化曲线,数据判读系统通过监控终端向测试人员发出报警信号并显示报警原因。
实际测试应用中,如卫星遥测数据发生异常,某个遥测值有异常上升或下降趋势,初期因为没有超过预先设定的门限值,测试人员无法发现测试异常。如果应用此数据判读系统,经过一段时间的数据积累,系统能够提前给出一段时间后参数越界的报警,提示测试人员重点给予关注,便于发现异常变化趋势。
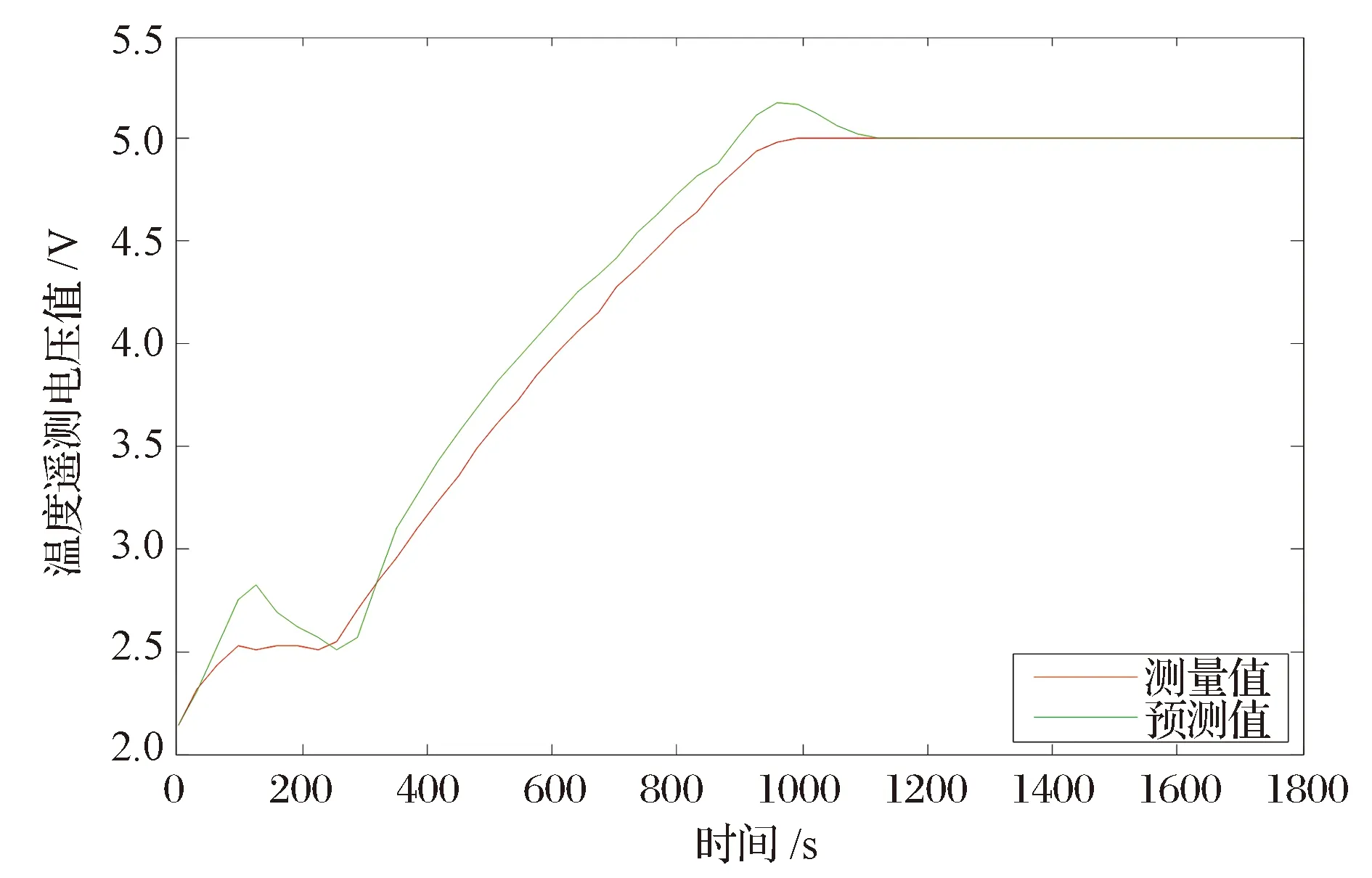
图2 陀螺温度遥测预测效果
6 结束语
本文针对卫星遥测数据量庞大,信号类型复杂,数据实时性、一致性和可靠性要求高,数据随环境变化快,传统手工数据判读方法无法满足卫星测试需求的问题,分析了遥测数据的变化规律,提出了一种基于Kalman滤波的卫星遥测数据判读系统框架,定义了系统中各模块的功能及接口关系,并应用某卫星实际遥测数据对预测效果进行了验证。验证结果表明,该系统能准确地预测出下一周期数据,对数据异常区域反应迅速,能及时发现并预报数据异常,并且算法执行效率高,能够很好地满足卫星测试的实时性要求,适用于长期数据判读和异常数据检测。
References)
[1]李砥擎,朱维宝,王庆成,等.一种用于航天器数据监视的知识表示方法[J].计算机测量与控制,2006,14(3):289-292
Li Diqing, Zhu Weibao, Wang Qingcheng,et al. Knowledge representation approach to spacecraft data monitoring[J].Computer Measurement & Control, 2006,14(3):289-292 (in Chinese)
[2]吴限德,孙兆伟,陈卫东.小卫星测试数据在线时间序列判读方法[J].哈尔滨工程大学学报,2012,33(3):383-388
Wu Xiande, Sun Zhaowei, Chen Weidong.An on-line data interpretation method in a micro-satellite ground test system based on a time series analysis[J]. Journal of Harbin Engineering University, 2012,33(3):383-388 (in Chinese)
[3]赵峰,文博武,孙洁,等.基于卫星数据判读的一种方法[C]//第十六届全国测试与故障诊断技术研讨会.四川:中国计算机自动测量与控制技术协会,2007:225-229
Zhao Feng, Wen Bowu, Sun Jie,et al. An interpretation method based on satellite data[C]//The 16thNational Testing and Fault Diagnosis Technology Conference. Sichuan Province: China Computer Automated Measurement and Control Technology Association, 2007:225-229 (in Chinese)
[4]鲍齐克 S M. 数字滤波和卡尔曼滤波[M].北京:科学出版社,1984
S M Bozic. Digital filter and Kalman filter [M]. Beijing: Science Press, 1984
[5]Myers A,Luecke R H.Process control application of an extended Kalman filter algorithim[J].Comp and Lehem.Eng,1991,15(12):853-856
[6]廖瑛,尹大伟,郑宇昕,等. 基于自适应Kalman滤波算法的航空发动机可测参数及其偏离量估计[J]. 国防科技大学学报,2012,34(4):1-6
Liao Ying,Yin Dawei,Zheng Yuxin,et al. Aeroengine measurable parameters estimation using adaptive Kalman filter algorithm [J]. Journal of National Universtity of Defense Technology, 2012, 34(4):1-6 (in Chinese)
[7]章辉,李静雅,许晓东,等. Kalman滤波预测的多小区子载波分配方法[J]. 北京邮电大学学报,2009, 32(3):86-90
Zhang Hui, Li Jingya, Xu Xiaodong,et al. Multicell subcarrier allocation based on Kalman filter forecast [J]. Journal of Beijing University of Posts and Telecommunications, 2009, 32(3): 86-90 (in Chinese)
[8]武延鹏,尤政,任大海. 采样Kalman滤波器在天文卫星定姿滤波中的应用[J]. 清华大学学报,2003,43(8):1013-1016
Wu Tingpeng, You Zheng, Ren Dahai. Unscented Kalman filter application in astronomical satellite attitudedetermination [J]. Journal of Tsinghua University, 2003, 43(8):1013-1016 (in Chinese)
[9]苏小平,陈伟根,奚红娟. 采用Kalman滤波算法预测变压器绕组热点温度[J]. 高电压技术,2012,38(8):1909-1916
Su Xiaoping, Chen Weigen, Xi Hongjuan.Winding hot-spot temperature prediction for oil-immersed power transformer based on Kalman filter algorithm [J]. High Voltage Engineering, 2012, 38(8):1909-1916 (in Chinese)
[10]冯孝辉,王静,杨海龙. 基于知识推理的小卫星综合测试知识库系统架构设计与应用[J]. 计算机测量与控制,2011,19(4):753-792
Feng Xiaohui, Wang Jing, Yang Hailong.Design and application on case-based knowledgebase software for satellite integration testing [J]. Computer Measurement & Control, 2011, 19(4):753-792 (in Chinese)
(编辑:李多)
Satellite Telemetry Data Interpretation System Based on Kalman Filter
WU Jing SU Zhenhua SUN Cheng
(DFH Satellite Co.Ltd., Beijing 100094, China)
By analysing the telemetry data according to their transforming rules, the paper proposes an interpretation system based on Kalman filter for satellite. Besides, the functions of every module and the interfaces are defined. Finally, by taking advantage of the telemetry data,the system proposed is verified. The results show that this interpretation system has good performances in detecting data abnormal and can meet real-time requirements of the tests for satellite.
satellite; data interpretation; Kalman filter
2013-10-29;
:2014-02-20
国家重大航天工程
吴婧,女,硕士,从事小卫星控制系统测试技术研究。Email:wu_jing_jing@hotmail.com。
V557
:ADOI:10.3969/j.issn.1673-8748.2014.03.016