太阳帆日心定点悬浮转移轨道设计
2014-07-19罗超郑建华
罗超 郑建华
(1 中国空间技术研究院载人航天总体部, 北京 100094)
(2 中国科学院空间科学与应用研究中心, 北京 100190)
太阳帆日心定点悬浮转移轨道设计
罗超1郑建华2
(1 中国空间技术研究院载人航天总体部, 北京 100094)
(2 中国科学院空间科学与应用研究中心, 北京 100190)
研究了太阳帆航天器日心定点悬浮轨道(HFDO)的转移轨道设计问题,以球坐标形式建立了太阳帆的动力学模型,基于该模型给出在日心悬浮轨道基础上实现定点悬浮的条件,提出了一种实现日心定点悬浮的转移轨道设计方法。首先,确定定点悬浮的位置;然后,设计经过该位置的绕日极轨轨道;最后,实施轨道减速实现定点悬浮,并给出了解析形式的轨道控制律。结合太阳极地观测任务,设计了定点悬浮在太阳北极1 AU处的太阳帆转移轨道。仿真结果表明:该轨道转移方案总耗时3.5年,太阳帆定点到黄北极距日心1 AU处,此后只要保持太阳光垂直照射帆面,即可维持稳定的悬浮状态。
太阳帆;日心悬浮轨道;轨道设计;定点悬浮
1 引言
太阳帆航天器是一种利用太阳光压获得推进力进行宇宙航行的新型飞行器,被认为是未来人类探索深空的有效手段。太阳帆航天器与传统的采用化学推进的航天器最大区别在于,它不需要携带燃料,在太阳光压作用下可以持续加速,最终达到传统航天器5~10倍的速度。
高性能的太阳帆可以实现一些具有特殊科学意义的非开普勒轨道,日心悬浮轨道就是其中很具有代表性的一类轨道。文献[1]提出太阳帆在太阳光压作用下能够悬浮在黄道面的上方或下方,且轨道为周期性轨道,称这类轨道为日心悬浮轨道。由于日心悬浮轨道完全脱离了黄道面,且轨道面不包含中心天体太阳,对日观测将不受黄道面内小天体及宇宙尘埃的影响,观测精度大大提高,合适的轨道参数设计还能实现与地球公转同步的日心悬浮轨道,方便对地通信。
文献[2-4]系统地研究了日心悬浮轨道的设计和稳定性,通过选择不同的轨道周期将悬浮轨道分为三种类型,并给出了轨道的实现条件和保持方案,分析了轨道的稳定性。文献[5]研究了日心悬浮轨道附近的编队飞行问题。文献[6]应用遗传算法结合序列二次规划(SQP)算法的混合优化算法,设计了从地球逃逸轨道到日心悬浮轨道的太阳帆转移轨道。文献[7]在圆型限制性三体动力学模型下研究了实现行星悬浮轨道的太阳帆转移轨道设计问题。然而,文献[6-7]的研究对象均为普通悬浮轨道,其转移轨道设计方法不适用于定点悬浮。太阳极地观测任务要求太阳帆定点悬浮在黄北极上空,相对太阳的轨道速度为零,相对普通悬浮轨道而言,实现定点悬浮的转移轨道设计难度更大。
本文首先描述了日心悬浮轨道,以球坐标形式建立了太阳帆的轨道动力学模型,并在该模型的基础上提出了一种日心定点悬浮轨道(HFDO)的转移轨道设计方法。该方法可实现太阳帆的日心定点悬浮,且轨道控制律具有解析形式,太阳帆的姿态不需要频繁机动,易于工程应用。最后,结合太阳极地观测任务,利用本文提出的方法设计了定点悬浮在黄北极1 AU处的太阳帆转移轨道,并对轨道设计方案进行了验证。
2 日心悬浮轨道
绕日飞行的太阳帆由于远离行星,可以认为只受到太阳引力和太阳光压的作用。太阳光压在理想太阳帆上产生的加速度ac可由式(1)表示[2]。
(1)
式中:α为太阳光与帆面法向矢量n的夹角,称为锥角;μ为太阳引力常数;r为太阳帆到日心距离矢量r的大小;β为太阳帆的光压因子,定义为太阳光垂直照射帆面时的光压与太阳对帆引力的比值,只与太阳帆自身的质量面积比σ有关,即
(2)
式中:标称质量面积比σ*=1.53g/m2。
图1为悬浮高度z、轨道半径ρ、轨道角速度ω的日心悬浮轨道,ψ和φ分别为黄道经度和纬度。sτζγ为太阳帆轨道坐标系,其中,δ为帆面法线矢量n在sτζ平面内的投影与sζ的夹角,称为转角,与锥角α共同描述n在空间内的指向。图中使用的惯性坐标系OXYZ为J2000日心黄道坐标系,O′X′Y′Z′为旋转坐标系。在旋转坐标系下,太阳帆的运动方程如下。
(3)
式中:V为太阳引力在帆上产生的速度矢量,其大小V=-μ/r,-V为太阳引力在帆上产生的加速度。
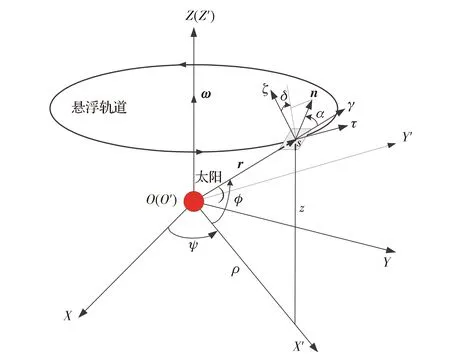
图1 日心悬浮轨道
(4)
(5)
分析可知,式(4)和式(5)分别是维持悬浮轨道对太阳帆姿态控制的要求和对太阳帆光压因子的要求。只要根据任务要求设计日心悬浮轨道的3个独立参数z,ρ,ω,就可以唯一确定太阳帆的锥角和光压因子,结合式(2),可确定太阳帆的质量面积比σ,进而确定太阳帆的尺寸。
3 日心定点悬浮转移轨道设计
3.1轨道动力学模型的球坐标形式
如图1所示,以球坐标(r,ψ,φ)表示的太阳帆轨道动力学模型[8]如下。
(6)
式中:黄道经度ψ∈[0,2π];黄道纬度φ∈[-π/2,π/2]。
(7)
(8)
3.2转移轨道设计
因为式(7)和式(8)在太阳帆轨道面与黄道面垂直条件下才成立,为了实现太阳帆日心定点悬浮的目标,首先要将太阳帆送入绕日极轨轨道,然后设计一种轨道控制律来实现轨道减速,在到达目标悬停点时轨道速度恰好减为零,这样就能够实现日心定点悬浮。
3.2.1 轨道倾角抬升
显然,常规推进方式不能实现轨道倾角为90°的绕日极轨轨道,要设计一种利用太阳帆推进抬升轨道倾角的方法。该阶段太阳帆轨道控制律可由式(9)表示[9]。
(9)
式中:α*为一个定值,由太阳帆的光压因子β决定;u为纬度幅角,数值上等于近心点幅角f与真近角θ之和。
控制规律的物理意义可由图2说明。太阳帆所受的太阳光压可以分解为3个方向的力:日心与太阳帆连线方向的径向力R,在轨道面内垂直于R指向前进方向的切向力T,垂直于轨道面的法向力N。它们与太阳帆姿态角α和δ的关系为
(10)
变轨目的是轨道倾角抬升,由动量矩定理可知,在轨道拱线方向上施加如图2所示的外力矩M,可使轨道角动量h绕节线向M旋转,轨道倾角i逐渐增大,实现了轨道倾角抬升。法向力N可以产生外力矩M。在cosu≥0时,N的方向垂直于轨道面向上;在cosu<0时,垂直于轨道面向下。N越大,轨道倾角抬升越快,即要求δ=0或π,此时,切向力T为零,可以保持轨道形状大体不变。因此,该阶段太阳帆的帆面法向矢量n是在δ=0或π之间切换,每个轨道周期指向发生2次变化。保持式(9)的轨道控制律,太阳帆就可以抬升到轨道倾角为90°的绕日极轨轨道。

图2 太阳帆轨道倾角抬升原理
3.2.2 轨道减速

分析式(7),当β=1,且α=0时,太阳帆在径向受力平衡,有实现定点悬浮的可能性。由于引力与太阳光压都与距离的平方成反比,即平衡条件与距离无关,理论上,太阳帆可以在距离太阳任意远的地方实现定点悬浮。
(11)
(12)

由式(11)得
(13)
对式(11)求导得
(14)
联立式(12)与式(14),得
(15)
联立式(11)和式(14),得
(16)
结合边界条件对式(16)积分,得
(17)
可见,锥角α由初值-π/2到0,φ相应地变化了3π/4的角度,即太阳帆从圆形开普勒轨道减速到定点悬浮轨道,φ角共转过3π/4。该结论有助于轨道设计时选择合适的时机开始实施轨道减速,使太阳帆在到达目标点时轨道速度恰好为零,进而实现定点悬浮。
通过上述分析,可以总结出太阳帆日心定点悬浮轨道的转移轨道设计步骤:①确定定点悬浮的位置,该位置应位于与黄道面垂直的平面内;②设计经过该位置的绕日极轨轨道,这一阶段只需根据太阳帆光压因子β来设计太阳帆锥角α的大小,转角δ的变换规律是确定的;③在适当的轨道位置实施轨道减速,使太阳帆在到达悬停点时轨道速度恰好减为零,实现定点悬浮。
4 设计实例
以太阳极地观测任务为例,设计日心定点悬浮轨道方案。该任务要求太阳帆脱离黄道面进入太阳极轨轨道,从黄道面的上方(或下方)遥感观测日冕物质抛射(CME)的传播和演化,并对其进行成像。
考虑到任务要求及节省轨道转移的时间等因素,太阳帆定点位置可选择在黄北极距日心1 AU处,称为悬停A点。太阳帆的光压因子β为1,由式(2)可知,太阳帆的质量面积比σ为1.53 g/m2。
轨道转移方案分为两个阶段:首先,从地球逃逸轨道转移到绕日极轨轨道;然后,在距A点3π/4处实施轨道减速,直至速度减为零;太阳帆将定点悬浮在黄北极的上空。
第一阶段的太阳帆指向控制规律可由式(18)表示。
(18)
经过第一阶段的变轨,太阳帆轨道由地球逃逸轨道变为绕日极轨轨道,伺机进行轨道减速,进入第二阶段变轨。在第二阶段,太阳帆指向控制规律见式(15);当减速飞至A点时,轨道速度恰减为零,实现了太阳帆在A点的定点悬浮。
设太阳帆于2015年7月4日发射,在地球逃逸轨道上展开,转移轨道仿真如图3所示。蓝色曲线表示变轨第一阶段的轨迹,红色曲线表示第二阶段的轨迹。仿真结果表明,第一阶段耗时701 d,太阳帆的轨道倾角由0°抬升到87.5°。之后,太阳帆沿着绕日极轨圆轨道运行44 d,到达距A点3π/4处(图3标☆处),开始第二阶段的变轨。第二阶段耗时550 d,太阳帆速度由29.42 km/s减至0.287 km/s。此时,太阳帆的轨道速度并不为零,这是因为第一阶段控制后的轨道并不是严格的圆轨道,偏心率e为0.017。如果选择逐次逼近的控制方法,偏心率e可以更加逼近于0。太阳帆以0.287 km/s的轨道速度定点在黄北极上空,平均1年漂移3.47°。
图4为太阳帆姿态角α和δ随时间变化的曲线,符合太阳帆指向控制律式(15)和式(18)。图5为太阳帆与太阳间的距离r随时间变化的曲线,由图可知,在发射701 d之后,太阳帆与太阳间的距离基本保持1 AU不变,说明太阳帆在第二阶段基本沿着半径为1 AU的圆轨道运行。图6为太阳帆轨道速度V随时间的变化情况,由图可知,在发射后745~1295 d,轨道速度由29.42 km/s减至接近0 km/s。
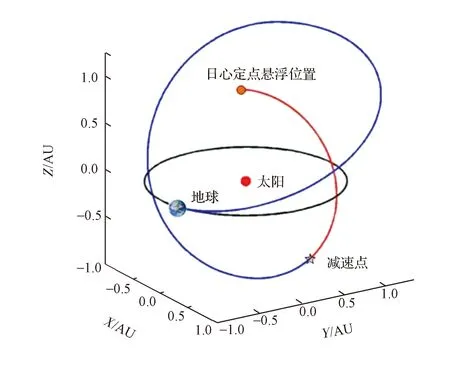
图3 太阳极地观测任务日心定点悬浮轨道设计结果
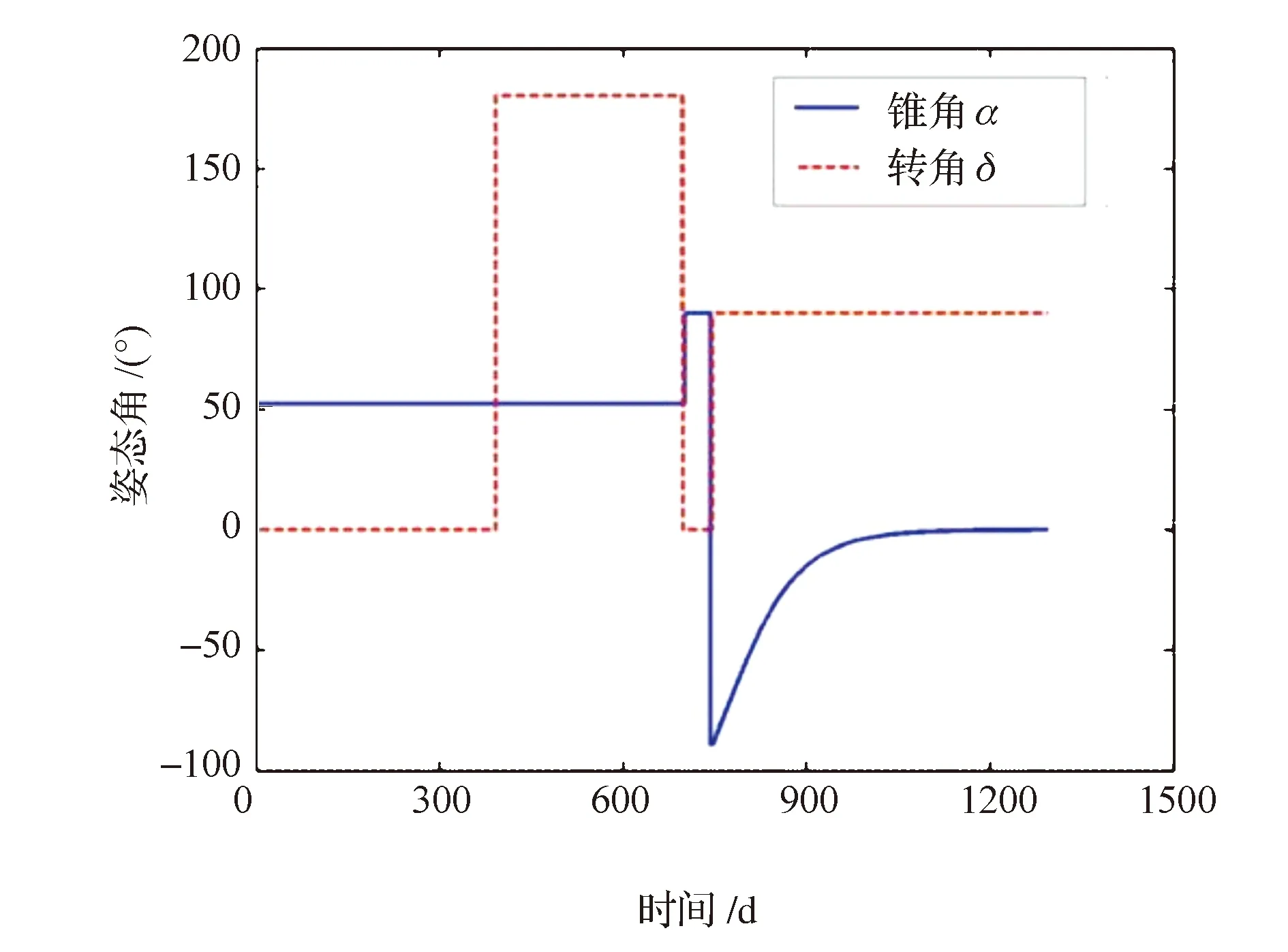
图4 太阳帆姿态角α和δ随时间变化情况
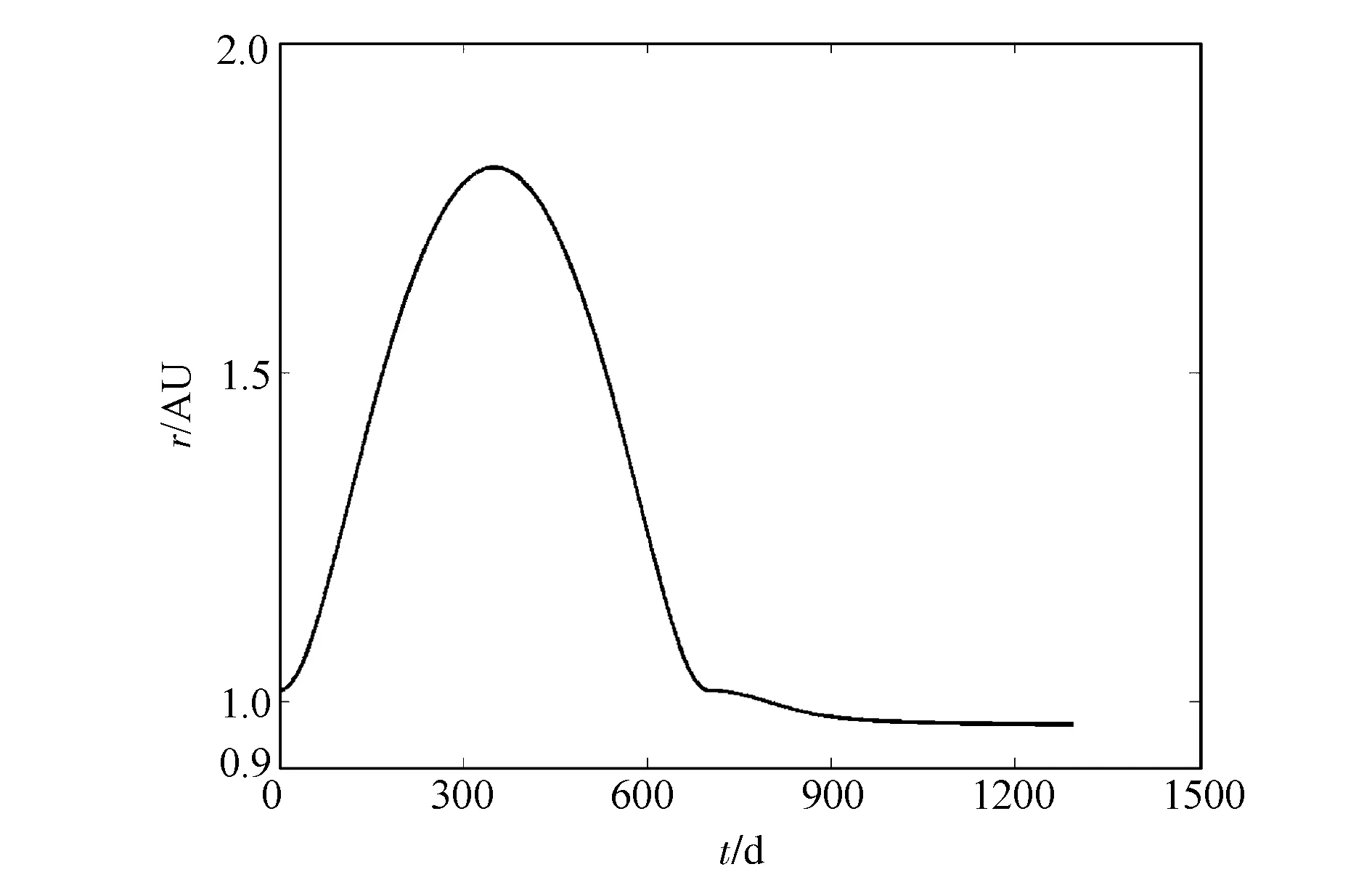
图5 太阳帆相对于太阳的距离r随时间变化情况
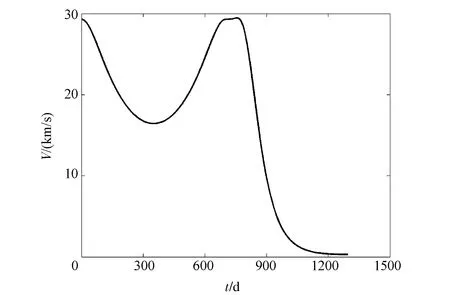
图6 太阳帆轨道速度V随时间变化情况
5 结束语
本文研究了利用太阳帆实现日心定点悬浮轨道的转移轨道设计问题,提出了一种轨道设计方案。以太阳极地观测任务为例,设计了定点悬浮在黄北极1 AU处的日心悬浮轨道,并进行了仿真验证。结果表明,该轨道设计方案能够实现任务要求的日心定点悬浮轨道。本文提出的轨道设计方案要求太阳帆的质量面积比达到1.53 g/m2。目前,美国国家航空航天局(NASA)兰利研究中心(LRC)研发的太阳帆材料面密度已经可以达到4~5 g/m2[10],虽然尚不能满足材料要求,但是随着材料科学的发展,用于建造日心定点悬浮的太阳帆材料也必将被开发出来,因此,更为轻质的太阳帆材料也成为后续研发的重点。
References)
[1]Forward R L. Light-levitated geostationary cylindrical orbits[J]. Journal of Astronomical Science, 1981,29(1):73-80
[2]McInnes C R.Solar sailing: technology, dynamics and mission applications[M].Chichester,UK:Springer & Praxis Publishing,1999:173-196
[3]McInnes C R. Dynamics, stability, and control of displaced non-Keplerian orbits[J]. Journal of Guidance, Control, and Dynamics, 1998, 21(5):799-805
[4]McInnes C R. Inverse solar sail trajectory problem [J]. Journal of Guidance, Control, and Dynamics, 2002, 26(2):369-371
[5]龚胜平,李俊峰,宝音贺西.太阳帆悬浮轨道附近的相对运动[J].力学学报,2007,39(4):522-527
Gong Shengping, Li Junfeng, Baoyin Hexi. Relativemotion around displaced solar orbit[J]. Chinese Journal of Theoretical and Applied Mechanics, 2007, 39(4):522-527 (in Chinese)
[6]Hughes G W, McInnes C R. Solar sail hybrid trajectory optimization for non-Keplerian orbit transfers[J]. Journal of Guidance, Control, and Dynamics, 2002, 25(3):602-604
[7]Bookless J, McInnes C R. Dynamics and control of displaced periodic orbits using solar-sail propulsion[J]. Journal of Guidance, Control, and Dynamics, 2006, 29(3):527-537
[8]Wie B. Thrust vector control analysis and design for solar-sail spacecraft[J]. Journal of Spacecraft and Rockets, 2007, 44(3):545-557
[9]罗超,郑建华,高东.太阳帆航天器的轨道动力学和轨道控制研究[J].宇航学报,2009,30(6):2111-2117
Luo Chao, Zheng Jianhua, Gao Dong. Study on orbit dynamics and control of solar-sail spacecraft[J]. Journal of Astronautics, 2009, 30(6):2111-2117 (in Chinese)
[10]Laue G, Case D, Moore,J. Fabrication and deployment testing of 20-meter solar sail quadrants for a scaleable square solar sail ground test system[C]//Proceedings of the 41st AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit. Washington D. C.:AIAA,2005:3930-3944
(编辑:夏光)
Solar Sail Trajectory Design for Transferring Heliocentric Fixed Displaced Orbit
LUO Chao1ZHENG Jianhua2
(1 Institute of Manned Spacecraft System Engineering, China Academy of Space Technology, Beijing 100094, China)
(2 Center for Space Science and Applied Research, Chinese Academy of Sciences, Beijing 100190, China)
This paper investigates the transfer trajectory design for solar sail HFDO (heliocentric fixed displaced orbit). The conception of heliocentric displaced orbit is described, and the orbital equations in spherical coordinates are given. The conditions for static equilibria are identified based on the equations. A method of solar sail trajectory design is proposed for transferring HFDO. Firstly,the fixed displaced point is confirmed. Secondly, the solar polar orbit is designed. Thirdly, the orbit velocity is decreased to reach the fixed displaced point, and an analytic orbit control method is presented. Solar polar region observation mission is designed and simulated as a HFDO example, which levitates a solar sail spacecraft 1AU above the ecliptic north pole. The results show that the trajectory design method can realize the transfer to HFDO in 3.5 years.
solar sail; heliocentric displaced orbit; trajectory design; fixed displaced point
2013-07-31;
:2013-09-27
国家自然科学基金(40574070)
罗超,男,博士,工程师,从事航天器动力学与控制研究工作。Email:luochaocasc@163.com。
V412.4
:ADOI:10.3969/j.issn.1673-8748.2014.03.003