美国高轨抵近操作卫星MiTEx飞行任务及启示
2014-07-19蒙波黄剑斌李志王爱明
蒙波 黄剑斌 李志 王爱明
(1 钱学森空间技术实验室, 北京 100094)
(2 北京空间飞行器总体设计部, 北京 100094)
MiTEx卫星飞行任务可按阶段作如下总结:
美国高轨抵近操作卫星MiTEx飞行任务及启示
蒙波1黄剑斌1李志1王爱明2
(1 钱学森空间技术实验室, 北京 100094)
(2 北京空间飞行器总体设计部, 北京 100094)
简述了美国“微卫星技术试验”(Micro-satellite Technology Experiment, MiTEx)计划进展情况,根据目前可获得的最新的MiTEx卫星轨道数据,对其整个飞行过程进行了深入研究,划分了MiTEx-A卫星与MiTEx-B卫星飞行阶段,描述了各阶段飞行轨迹,给出了飞行任务关键数据,对其飞行任务进行了总结。在飞行任务分析的基础上,结合国外对MiTEx卫星的相关报道,分析了MiTEx卫星可能具备的抵近操作任务执行能力,提出了对高轨非合作目标抵近操作应用的启示,总结分析了执行高轨抵近操作任务所需的关键技术。
MiTEx计划;地球静止轨道;抵近操作;抓捕服务
1 引言
地球同步轨道卫星根据任务要求一般定点运行在赤道上空地球静止轨道(GEO)的某一位置,可满足对地球特定区域的稳定覆盖要求,通常也把GEO称为高轨。高轨由于其轨道的特殊性,通常运行着天基信息网的关键节点卫星,对高轨卫星抵近操作,通过近距离侦察侦听,获取其轨道编目、几何外形、信号特征、光学特征、雷达特征等,对于掌握高轨空间态势具有重要意义。
目前在轨运行的可获取高轨空间态势的唯一卫星为美国的“微卫星技术试验”(Micro-satellite Technology Experiment, MiTEx)卫星。MiTEx是美国国防先进研究计划局(DARPA)、美国空军和美国海军联合实施对高轨目标抵近操作的微卫星计划。MiTEx空间飞行器包括三部分:美国海军研究实验室(NRL)研制的上面级,轨道科学公司(Orbital Sciences)研制的MiTEx-A卫星和洛马公司(Lockheed Martin)研制的MiTEx-B卫星[1]。
两颗MiTEx卫星于2006年入轨,目前MiTEx-A卫星飞行于比GEO低的准地球同步轨道,而MiTEx-B卫星则飞行于比GEO高的准地球同步轨道。MiTEx-A、MiTEx-B卫星质量均为225 kg[1-3]。由于卫星质量轻、体积小,只有美国空间监视网能够对其进行有效探测,其他国家现有的地基光学或雷达设备则无法探测,因此难以跟踪MiTEx飞行轨迹,不能判明其飞行任务。
作为美国目前唯一在高轨执行了抵近操作任务的卫星,可为其他国家发展类似功能的空间技术提供重要参考。本文根据目前可获得的少量MiTEx轨道数据(来源于www.calsky.com网站)[4],描绘了MiTEx-A与MiTEx-B卫星的飞行轨迹,进而对其飞行任务与抵近操作能力进行分析,并总结了MiTEx任务对高轨非合作目标抵近操作应用的启示,在此基础上分析了执行高轨抵近操作任务所需的关键技术。
2 任务概述
2006年6月21日,德尔它-II(DeltaII)运载火箭将MiTEx空间飞行器送入地球同步转移轨道(GTO),随后上面级将2颗MiTEx卫星送入比GEO轨道稍低的准地球同步轨道。MiTEx空间飞行器如图1所示。
MiTEx-A与MiTEx-B卫星入轨后进行了轨道机动和相互观测试验,并抵近国防支援计划-23(Defense Support Program 23,DSP-23)卫星进行观测[5-6]。美国官方将MiTEx卫星描述成美国国防先进研究计划局、美国空军、美国海军执行技术验证任务的卫星,可以对轻质量能源与动力系统、自主管理、自主导航、自主轨道机动等技术进行验证[2-3]。然而事实上,MiTEx卫星更是可执行对他国高轨空间目标观测任务的军事卫星,可对GEO带内卫星进行近距离观测,并可能通过轨道交会逼近GEO带内卫星至足够近的距离,为高轨空间对抗创造条件[5],到目前为止,MiTEx-A卫星一直保持在比GEO低约50 km的轨道上正常飞行,按照其观测能力分析,可能已经完成了对全GEO带内卫星的成像观测与信号侦听。
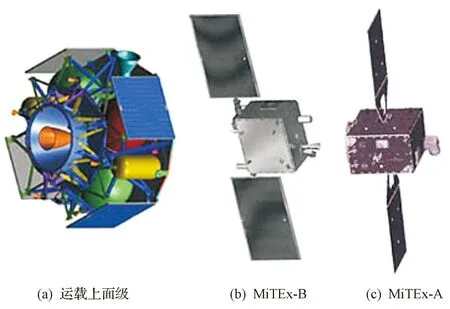
图1 MiTEx空间飞行器
3 MiTEx-A卫星飞行任务分析
MiTEx-A卫星飞行过程主要有以下6个阶段。
3.1GEO-1012km轨道飞行
MiTEx-A卫星从发射入轨到2009年1月,持续在高度GEO-1012km(指高度比GEO低1012 km,后文比GEO低的高度均用GEO-XXkm表示,比GEO高的高度均用GEO+XXkm表示)的准地球同步轨道上飞行,MiTEx-A在这段时间仅执行常规飞行任务,与MiTEx-B保持100~200 km的相对距离,互相观测,卫星星下点经度每天向东漂移约13.4°,每27 d时间即可完成对一整圈GEO带内卫星的自西向东相对飞行,如图2所示。
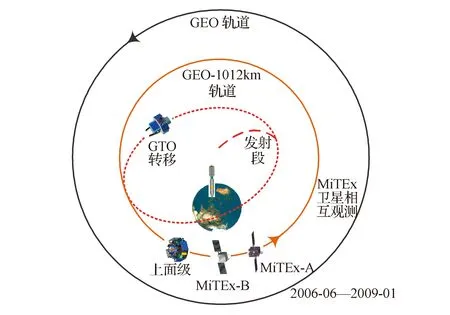
图2 GEO-1012km轨道飞行示意图
3.2抵近观测DSP-23卫星
2008年11月初,DSP-23卫星失效。2009年1月,为了对DSP-23抵近观测,MiTEx-A卫星进行轨道机动,抬升轨道高度860 km,并调整轨道倾角至2.4°,到达高度为GEO-152km的准地球同步轨道,2009年1月13日,在20°E上空附近,抵近观测了DSP-23,最近观测距离约为170 km。此前的2008年12月,MiTEx-B卫星也通过轨道机动,对DSP-23进行了抵近观测。MiTEx-A抵近观测DSP-23的飞行仿真轨迹如图3所示。

图3 MiTEx-A抵近观测DSP-23卫星的轨迹示意图
3.3GEO-152km~GEO-40km轨道飞行
执行完对DSP-23的抵近观测任务后,MiTEx-A卫星从2009年2月开始抬高轨道,2010年1月前到达高度GEO-40km的准地球同步轨道,倾角由2.4°降到了1.5°。在这近1年的时间内,MiTEx-A卫星在高度为GEO-152km~GEO-40km的准地球同步轨道上完成了对GEO带内卫星超过一圈的巡视观测,星下点经度从2009年2月的52.9°E变为了2010年1月1日的164.1°W,星下点沿地球赤道向东环绕了约1.4圈。MiTEx-A卫星除了进行轨道高度与倾角的小幅调整外,没有进行其它大幅轨道机动。
MiTEx-A卫星相对DSP-23的最近距离为300 km,说明它至少具有对300 km距离的GEO卫星的观测能力。基于这一观测能力的分析可知,在2009年2月—2010年1月这段时间,除了少数大倾角准地球轨道卫星外,MiTEx-A卫星能够获得对绝大多数GEO卫星的观测机会。
3.4GEO-52km~GEO-40km轨道飞行
从2010年1月1日到2011年1月1日,MiTEx-A卫星较为稳定地运行在高度GEO-52km~GEO-40km的准地球同步轨道,倾角由1.5°机动降低到了0.6°。在1年的时间内,MiTEx-A卫星星下点经度从2010年1月1日的164.1°W向东漂移了229.7°,在2011年1月1日到达星下点65.6°E的位置。MiTEx-A卫星除了进行轨道高度与倾角的小幅度调整外,没有进行其它大幅轨道机动。在这段时间内,164.1°W~65.6°E之间229.7°范围内的绝大多数GEO卫星都会进入MiTEx-A卫星的观测范围。
3.5较长时间保持在65.6°E~78.4°E区间飞行
2011年1月1日,MiTEx-A运行于高度GEO-52km、倾角0.6°的准地球同步轨道,星下点经度为65.6°E。正常飞行情况下,卫星在该轨道上星下点经度每天向东漂移约0.66°。而事实上,226天后的2011年8月15日,MiTEx-A星下点经度仅向东漂移到了78.4°E(实际向东漂移幅度仅12.8°,正常飞行情况下向东漂移幅度应为150°),那么可以推测MiTEx-A卫星在2011年1月1日—2011年8月15日这段时间内进行了多次轨道机动,可能的机动策略主要有两条:
(1)MiTEx-A卫星在65.6°E~78.4°E这一区间内的某个(或某些)轨道位置上做了定点悬飞保持,即驻停在某颗(或某些)GEO卫星下方,对某颗(或某些)GEO卫星实施持续观测;
(2)MiTEx-A卫星在65.6°E~78.4°E这一区间内通过轨道高度的调整,来回运行于比GEO低和比GEO高的准地球同步轨道,对区间内的GEO卫星进行自西向东与自东向西的反复观测。
65.6°E~78.4°E这一区间内分布着包括国防支援计划卫星-21(DSP-21)、特高频后继卫星-10(UFO-10)、特高频后继卫星-11(UFO-11)、大酒瓶卫星-1(Magnum-1)、卫星数据系统星-2(SDS-2)等美国军用卫星和我国天链-1卫星,MiTEx-A卫星保持在这一区间飞行,具有执行对上述GEO卫星的观测任务的能力。MiTEx-A卫星与DSP-21、UFO-10、UFO-11、MAGNUM-1、SDS-2、天链-1的最近相对距离分别约为140 km、130 km、130 km、80 km、280 km、90 km。
本阶段的飞行示意图如图4所示。

图4 2011年1月—8月的MiTEx飞行示意图
3.6GEO-52km~GEO-40km高度范围内正常飞行
从2011年8月15日到2013年8月26日,在这2年的时间内,MiTEx-A卫星较为稳定地运行在高度GEO-52km~GEO-40km、倾角0.25°~0.6°范围的准地球同步轨道。在2年的时间内,MiTEx-A卫星星下点经度从2011年8月15日的78.4°E持续向东漂移,漂移幅度为493.4°,于2013年8月26日到达星下点148.2°W的位置。MiTEx-A卫星除了进行轨道高度与倾角的小幅调整外,没有进行其它大幅轨道机动。
在这段时间内,整个GEO带内的大多数卫星都会进入MiTEx-A卫星的观测范围。
MiTEx-A卫星飞行任务关键数据如表1所示,MiTEx-A卫星飞行过程如图5所示。图5给出了MiTEx-A卫星在2011年1月-8月飞行过程的两种可能情况,对于情况一,需要卫星频繁进行悬飞轨道机动,燃料消耗较大,因此情况二的可能性相对较大。

表1 MiTEx-A卫星飞行任务关键数据
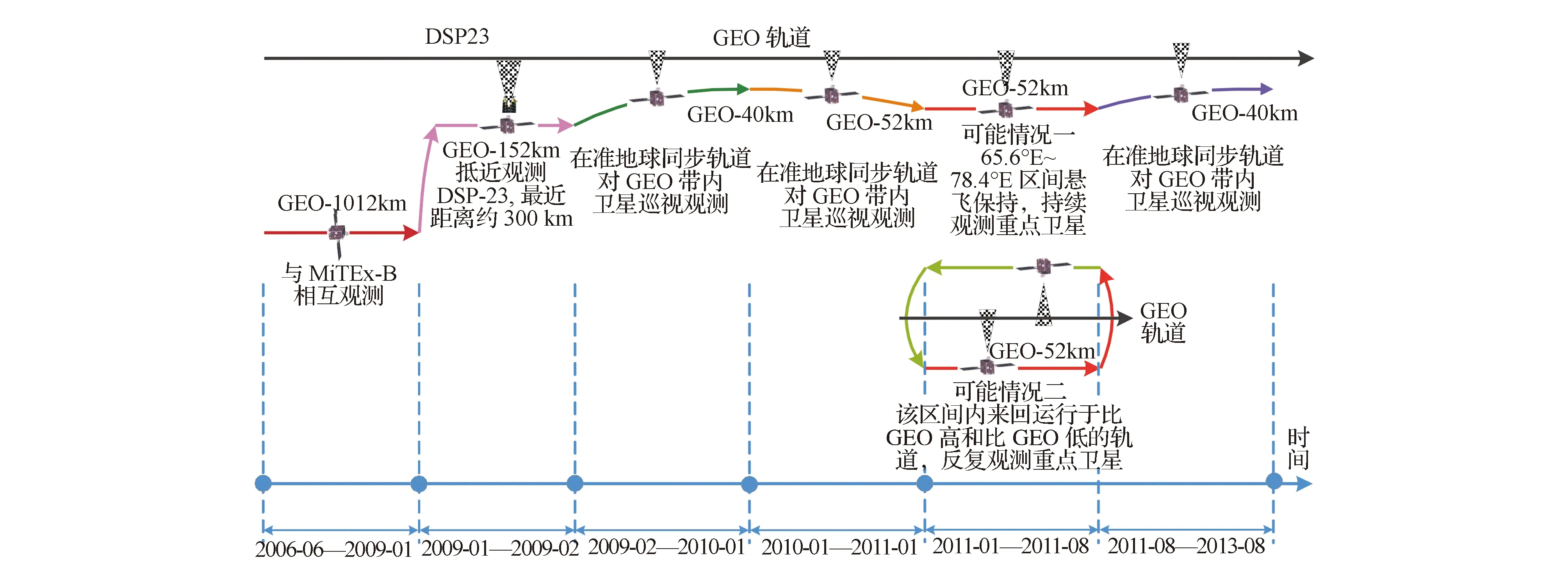
图5 MiTEx-A卫星飞行过程示意图
4 MiTEx-B卫星飞行任务分析
MiTEx-B卫星从发射入轨到2008年12月,主要在高度为GEO-1012km的准地球同步轨道上飞行,与MiTEx-A卫星保持100~200km的相对距离,执行与MiTEx-A卫星相互观测的任务,如图2所示。
2008年12月,为了对失效的DSP-23卫星抵近观测,MiTEx-B卫星进行轨道机动,抬升轨道高度922 km,到达高度GEO-90km的准地球同步轨道,12月23日对DSP-23的最近观测距离达到约100 km,获得了DSP-23的图像[7]。
在抵近观测DSP-23卫星后,直到2009年2月12日,MiTEx-B卫星还在高度GEO-90km的准地球同步轨道飞行,而2010年1月1日,该卫星已经进入高度GEO+400km准地球同步轨道飞行。
从2010年1月1日至2012年8月10日,MiTEx-B卫星稳定地飞行在高度GEO+400km的准地球同步轨道,星下点经度每天向西漂移约5.1°,在这2年的时间内,卫星没有进行轨道维持,其轨道参数的变化符合轨道自然摄动规律。可以推测MiTEx-B卫星有两种可能情况:
(1)MiTEx-B卫星由于某种原因而不能正常工作,寿命终结,在2010年1月1日前变轨进入高度GEO+400km的坟墓轨道,成为废弃卫星。
(2)MiTEx-B卫星在废弃轨道上进行对非合作目标(废弃GEO卫星)的自然交会抵近观测。
MiTEx-B卫星飞行过程如图6所示。

图6 MiTEx-B卫星飞行过程示意图
5 MiTEx卫星飞行任务总结与军事能力推测
MiTEx卫星飞行任务可按阶段作如下总结:
(1)运载火箭将MiTEx飞行器送入GTO轨道后,MiTEx上面级携带MiTEx-A与MiTEx-B卫星变轨进入准地球同步轨道,然后分别释放两颗MiTEx卫星。
(2)入轨初期,MiTEx-A与MiTEx-B执行两星之间相互观测任务,进行技术验证。
(3)2008年11月初DSP-23卫星失效后,MiTEx-B和MiTEx-A卫星先后抬高轨道,于2008年12月和2009年1月成功抵近DSP-23卫星,对其进行了近距离观测,将获取的图像及其它信息传回地面,供地面人员分析DSP-23失效原因[6,8]。
(4)MiTEx-A卫星抵近观测DSP-23卫星后,并没有将轨道高度调回GEO-1012km,而是继续在仅比GEO低100km左右的准地球同步轨道上,以较近的距离相对GEO带内卫星作巡视飞行,这样的飞行状态非常有利于MiTEx-A卫星执行对GEO带内卫星的巡视观测任务。MiTEx-B卫星抵近观测DSP-23卫星后,进入了高度GEO+400km的坟墓轨道,并且至今也没有进行轨道维持。
(5)在完成对GEO带内卫星多圈的巡视观测后,MiTEx-A卫星在2011年频繁进行轨道机动,在长达8个多月的时间内持续飞行在65.6°E~78.4°E上空,可能对这一区域的GEO卫星进行了反复观测。
(6)从2011年8月至今,MiTEx-A卫星在GEO-52km~GEO-40km的准地球同步轨道上,以较近距离相对GEO带内卫星巡视飞行,可能已经完成了对整个GEO带内大多数卫星的巡视观测。
通过MiTEx卫星的飞行任务分析,可以推测出MiTEx所演示验证的技术能够直接用于空间对抗[5],它可能具有如下军事能力:
(1)先进的上面级装备了太阳电池翼和长寿命推力器,具有强大机动能力,能进行大范围快速轨道机动,可将卫星从GTO轨道直接送入GEO轨道任意位置,表明其具有将微小型航天器快速投送到全轨道空间目标附近的能力[5,9]。
(2)MiTEx-A卫星至今已在轨正常运行近8年时间,并且多次进行轨道机动,其长寿命与高机动性能,使MiTEx-A卫星能够机动到GEO轨道上任何位置。
(3)由于MiTEx-A卫星可在GEO轨道空间对GEO卫星实施抵近操作,进行拍照,详细侦察GEO卫星。接收GEO卫星收、发的无线电信号,甚至干扰GEO卫星与地面的通信链路,直接实施近距离对抗作战[5]。
6 MiTEx任务的启示
MiTEx卫星自2006年发射升空以来,已经在轨正常运行近8年,其中MiTEx-A卫星先后经历了与MiTEx-B卫星相互近距离观测、抵近观测DSP-23卫星、在GEO-50km轨道附近作长期巡航漂移等飞行过程,可执行对高轨卫星成像观测、信号侦听、通信干扰等高轨抵近操作任务,可以应用到以下方面:
1)高轨空间目标巡航普查
抵近操作飞行器在低于或高于GEO的准地球同步轨道上运行,利用相对GEO的高度差产生的角速度差,相对GEO带内卫星自西向东或自东向西运行,可获得相对GEO带内大量卫星较近距离的观测机会,从而完成对高轨空间目标的巡航普查,获取其轨道编目信息、几何外形特征、电磁信号特征。
2)高轨区间目标驻留侦察
抵近操作飞行器可通过轨道机动进行位置保持,持续驻留在某一GEO轨道区间内飞行,反复获得相对该区间内GEO卫星较近距离的观测机会,从而对该区间内卫星反复实施驻留侦察,比如本文分析的MiTEx-A卫星第5阶段飞行任务。
3)高轨重点目标抵近详查
抵近操作飞行器通过轨道机动,对于高轨重点目标可接近至几千米乃至数百米距离,对目标详查,获取其高分辨率图像信息和电磁信息,实现对目标的特征提取与识别;并可利用近距离的优势,实现对目标通信信号的干扰。
MiTEx卫星抵近操作任务的成功实施,充分表明美国已经具备了对所有GEO卫星巡航观测、对特定GEO区域反复侦察、对重点GEO卫星抵近详查的能力。
高轨抵近操作卫星在具备对高轨重点目标抵近详查能力的基础上,如果发展抓捕对接与组合体控制等技术,则可能实现对高轨目标的抓捕、连接,进而可完成对废弃卫星拖曳离轨、对故障卫星轨道救援、对在轨资源拆解利用等在轨服务操作任务,可以在高轨空间全面态势感知的基础上,进一步获取对己方卫星维修维护、对敌方卫星俘获控制、对空间碎片天基监测和清除等能力。
GEO是人类重要的地球轨道资源,运行着通信、数据中继、导航、电子侦察和导弹预警等高价值军用卫星,高轨卫星安全稳定运行对于国家安全具有重要的战略意义。美国通过MiTEx任务已经较为全面地掌握了高轨空间态势,验证了高轨抵近操作技术,后续必然还将通过抓捕操作等技术的发展,形成对高轨卫星服务操控的能力。获取全球尤其是国土上空的高轨空间态势,掌握高轨空间活动信息,并进一步发展高轨卫星服务操控技术,是非常具有前景的研究方向,存在巨大的价值及应用潜力。
7 高轨抵近操作及其拓展应用的关键技术
实现对高轨目标尤其是非合作目标的抵近操作,以及在抵近操作基础上进行拓展应用的抓捕、服务操控所需要突破的关键技术,主要有以下几个方面。
1)高轨长时间自主运行技术
抵近操作飞行器为了全面获取高轨空间态势,必然需要长时间运行于国土上空以外的高轨区域,处于本国地面测控站不可见范围内。以MiTEx-A卫星长期运行的GEO-50km轨道为例进行分析,完成对全球GEO带内卫星巡航一圈的周期为560 d,我国地面测控站不可见的GEO范围约占51%,因此需要卫星具有约286 d时间的自主运行能力。需要突破的关键技术点包括高轨长时间自主导航技术、高轨长时间自主任务管理技术(包括自主任务规划调度、载荷协调管理、星上数据处理以及故障诊断与恢复技术等)。
2)空间自主交会、接近与停靠制导与控制技术
抵近操作飞行器逐渐接近目标卫星,测量敏感器获得目标卫星方位和距离信息,相对运动制导与控制在相对测量信息基础上进行航天器相对姿态、轨迹控制,从而抵近目标卫星至所需距离范围。尤其针对非合作目标的制导与控制,对目标进行多角度、多方位的自主绕飞,可为获取目标多维度图像信息奠定良好基础。需要突破的关键技术包括对空间目标的主动绕飞控制技术、对姿态失控/机动目标的随动跟踪控制技术、对姿态失控/机动目标的停靠制导与控制技术。
3)高效率快响应推进技术
在执行抵近操作任务过程中,飞行器需要进行多次机动,对推进系统提出了很高的要求:一方面,飞行器因操作任务多,工作周期长,需要携带较多推进剂以提供持续的变轨能力,提高单位质量推进剂的推进效率有利于降低入轨质量,提高飞行器整体机动能力;另一方面,飞行器需要根据目标情况实时调整轨道与姿态,要求推进系统能够提供快速响应的机动能力。需要突破的关键技术点包括快响应轻小型推进技术、大推力电推进/激光推进技术、高效率混合推进技术。
4)空间目标成像识别与相对位姿测量技术
抵近操作飞行器对目标卫星接近过程中,需要对目标卫星进行成像识别与相对位姿测量,通过获取目标卫星的可见光、激光雷达等图像,获得其三维模型,掌握精准的目标物理外形信息,可为后续可能的抓捕定位目标位置。需要突破的关键技术包括空间非合作目标位姿测量技术、空间目标在轨三维模型重建技术、空间目标特征提取与跟踪测量技术。
5)空间目标抓捕对接技术
非合作目标没有专门用于抓捕与对接的合作装置,尽管通过前期的抵近操作、成像识别可以确定目标可抓捕特征部位,但是要在保证安全性前提下,实现可靠抓捕、锁紧与释放分离仍然十分复杂。需要利用机械臂、专用抓捕机构等手段对目标形成刚性连接组合体,或利用飞网、飞爪等手段形成柔性连接组合体,且根据需要,可安全释放分离。需要突破的关键技术包括空间非合作目标抓捕锁紧与释放分离技术、空间柔性网/爪抓捕技术。
6)空间组合体控制技术
抵近操作飞行器抓捕目标卫星后,组合体运行状态建立。与单个航天器相比,组合体的结构及动力学特性具有新的特点,决定了其控制的特殊性。首先,组合体的动力学参数在抓捕对接前后将发生变化,控制回路需要实时跟踪这些参数的变化,以保证控制系统的稳定性和控制精度,需要在轨利用激励源进行在线激励辨识。其次,两航天器对接完成后,相对姿态存在一定的偏差,需要进行姿态基准的标定。空间组合体对接后动力学复杂,为了得到系统准确的动力学模型,需要对变结构航天器的高效动力学建模问题进行专门研究。需要突破的关键技术包括非合作组合体动力学参数在轨辨识技术、非合作组合体姿态基准在轨标定技术、变质量特性组合体动力学控制技术、绳系组合体动力学与控制技术。
7)空间灵巧机械臂/手及服务操作技术
空间灵巧机械臂/手及服务操作,是指通过高自由度的机械手/臂机构实现高精度的末端操作能力,执行如模块更换、设备拆解利用、表面结构维修等范围小、精度要求高的空间任务。通过机器人的形式实现类似人手的控制精度与复杂度。需要突破的关键技术包括空间灵巧机械臂/手技术、多任务操作末端执行器技术、多灵巧臂/手/平台协同操作技术。
8 结束语
从MiTEx卫星任务可以看出,美国已经具备了对高轨卫星的近距离态势感知甚至近距离操作能力。发展MiTEx类似的高轨抵近操作卫星,可以获取详细的高轨空间态势,对高轨卫星自主管理、自主导航、非合作目标抵近、天基空间目标监视等先进技术进行试验验证,并推动高轨非合作目标抓捕对接、服务操作相关技术发展,在未来空间系统的维修维护上起到重要的技术支撑作用。因此,对MiTEx任务进行分析,参考其任务能力,深入发展高轨抵近操作技术,有着巨大的价值及应用潜力。
References)
[1]Wikipedia. MiTEx[EB/OL]. [2011-03-15].http://en.wikipedia.org/wiki/MiTEx.html
[2]Gunter’s Space Page. MiTEx-A[EB/OL]. [2012-01-04]. http://space.skyrocket.de:80/doc_sdat/mitex-a.html
[3]Gunter’s Space Page. MiTEx-B[EB/OL]. [2012-01-04]. http://space.skyrocket.de:80/doc_sdat/mitex-b.html
[4]Arnold Barmettler. Satellite found for ‘MiTEx’[EB/OL]. [2013-11-09]. http://www.calsky.com/cs.cgi.html
[5]CDI Center for Defense Information. CDI fact sheet: MiTEx(Micro-satellite Technology Experiment)[EB/OL]. [2006-07-14]. http://www.cdi.org/program/document.cfm?DocumentID=3591.html
[6]Craig Covault. Secret inspection satellites boost space intelligence ops[EB/OL]. [2009-01-14]. http://spaceflightnow.com/news/n0901/14DSP-23.html
[7]Short Sharp Science. Low-tech satellite subterfuge[EB/OL]. [2009-01-16]. http://www.newscientist.com/blogs/shortsharpscience/2009/01/low-tech-satellite-subterfuge.html
[8]Satnews Daily. Top secret in space - covert inspection of crippled defense military satellite[EB/OL]. [2009-01-19]. http://www.satnews.com/cgi-bin/story.cgi?number=252590162.html
[9]Encyclopedia Astronautica. MiTEx[EB/OL]. [2006-07-14]. http://www.astronautix.com/craft/mitex.html
(编辑:张小琳)
Introduction to American Approaching Operation Satellite MiTEx in Geostationary Orbit and Its Inspiration
MENG Bo1HUANG Jianbin1LI Zhi1WANG Aiming2
(1 Qian Xuesen Laboratory of Space Technology, Beijing 100094, China)
(2 Beijing Institute of Spacecraft System Engineering, Beijing 100094, China)
MiTEx(Micro-satellite Technology Experiment) is an American satellite deployed on a quasi-geosynchronous orbit, which includes MiTEx-A and MiTEx-B. The mission of MiTEx is to conduct approaching operations to the geostationary orbit satellites. In the paper, the development situations of MiTEx plan are presented. According to the orbit elements that can be acquired currently, the whole flight process of MiTEx is deeply studied, the flight stages of MiTEx-A and MiTEx-B satellite are partitioned, the flight tracks of each stage described, and the important track data provided. The flight mission of MiTEx satellites are analyzed. On the basis of flight mission analysis, and incombination with the literatures about MiTEx, the probable capabilities of MiTEx are conjectured. Based on the MiTEx mission, inspirations for the applications and required key technologies of approaching operations on non-cooperative GEO targets are proposed.
MiTEx; GEO; approaching operations; capture and orbital service
2013-11-14;
:2014-04-02
蒙波,男,高级工程师,研究方向为航天飞行动力学与控制。Email:mengbowanj@163.com。
V412.41
:ADOI:10.3969/j.issn.1673-8748.2014.03.020