基于MATLAB的注塑机五支铰斜排双曲肘合模系统优化设计
2014-07-14石绍伟杜思莹杜遥雪徐百平
石绍伟,杜思莹,杜遥雪,徐百平
基于MATLAB的注塑机五支铰斜排双曲肘合模系统优化设计
石绍伟1,杜思莹1,杜遥雪1,徐百平2
(1. 五邑大学 机电工程学院,广东 江门 529020;2. 广东轻工职业技术学院 广东高校高分子材料加工工程技术开发中心,广东 广州 510300)
对80T注塑机五支铰斜排双曲肘合模机构的运动特性和力学特性进行分析,确立以行程比和合模油缸推力放大倍数为优化目标,建立合模机构优化数学模型,确定参数化设计流程,并根据几何关系设立合理的约束参数,用MATLAB软件对合模机构进行优化设计. 优化后,该机构行程比提高了31.91%,合模油缸推力放大倍数提高了0.46%,为降低五点斜排双曲肘合模机构的能耗,提高工作效率及注塑件的质量提供理论依据.
注塑机;合模系统;MATLAB;优化设计
随着塑料工业的迅速发展,各类塑料制品在日常生活和生产中得到了广泛的应用,因此市场对于注塑机的要求也越来越高[1]. 合模系统是注塑机的重要组成部分之一,其中五支铰斜排列双曲肘合模机构具有锁模可靠、启闭平稳、合模速度快、耗能低等优点,是目前国内外广泛接受的一种合模系统[2]. 但双曲肘合模机构的设计变量较多,传统的设计方法,如经验类比法、图解法等,不仅计算量非常大,精度低,且设计的周期较长,难以满足注塑机向着高效、高速、大型、精密等方向发展的要求. 鉴于此,本文拟先对80T注塑机五支铰斜排列双曲肘合模机构的运动特性及力学特性进行合理的分析、建立合理的数学模型,再结合MATLAB软件对其进行优化设计.
1 五支铰双曲肘合模机构简介


图1 五支铰斜排列双曲肘合模机构平面结构简图
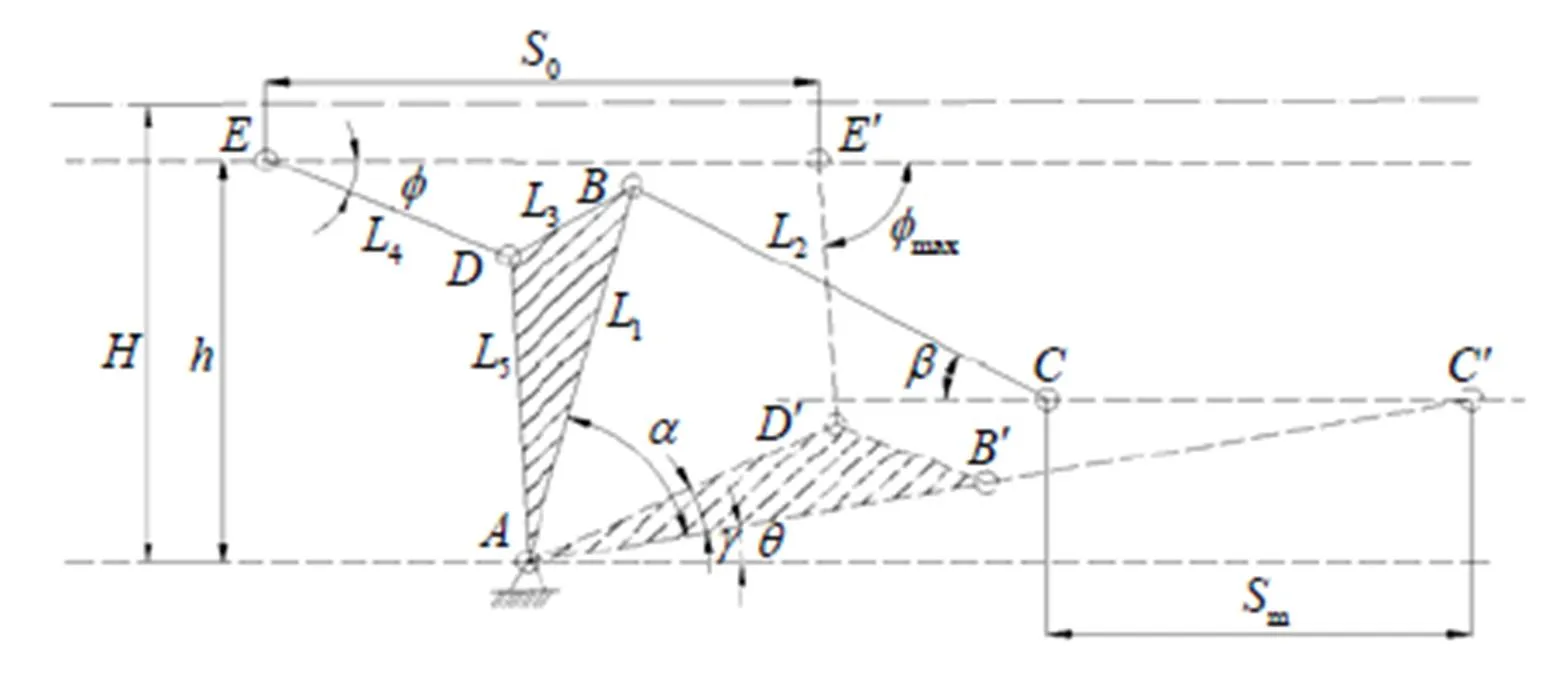
图2 合模机构运动简图
2 五支铰双曲肘合模机构运动特性分析
2.1 行程比

行程比为

2.2 合模油缸推力放大倍数

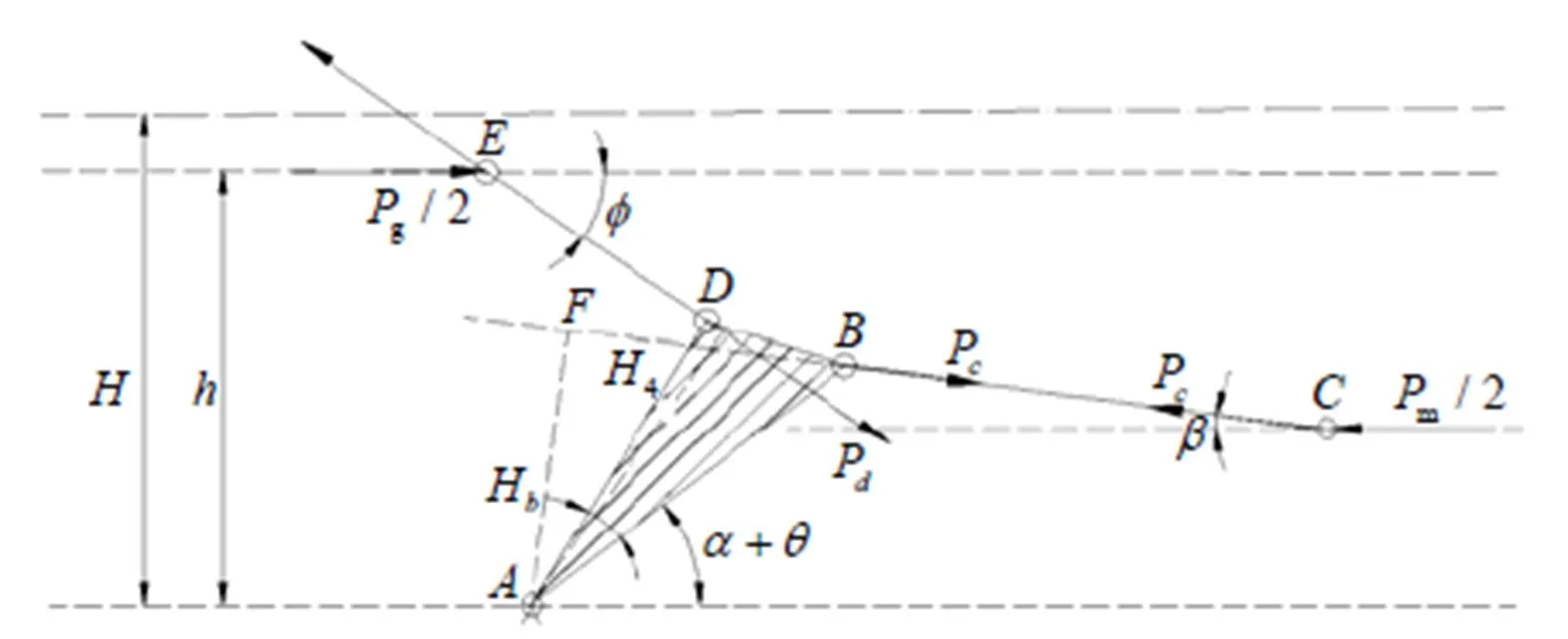
图3 合模机构受力简图
由几何关系知


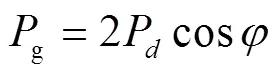
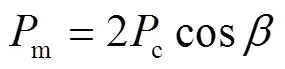
根据力矩平衡可得
因此可得油缸推力放大倍数
由图1可以看出



3 合模系统优化数学模型的建立
3.1 目标函数
为了便于求解,本文在处理目标函数时采用统一目标法中的理想点法. 即

3.2 设计变量


3.3 约束条件







4 基于MATLAB GUI优化工具箱的程序设计
因为设计参数比较多,传统优化方法的效率较低,精度也难以保证. MATLAB的GUI优化工具箱中提供的求解器可以使求解过程变得简单,而且计算效率得到很大提高,因此本文采用MATLAB优化工具箱中自带的fmincon函数进行求解[5].


表1 不同目标函数下的优化参数
5 优化分析
分别将原始值和取舍值代入上述数学关系式中,通过MATLAB软件绘制曲线图.
由图4可以看出,原始值的曲线在取舍值曲线之上,并且动模板移动一恒定位移时,原始合模机构的十字头移动距离要大于优化之后的各构件尺寸为取舍值时合模机构的十字头距离,整体来看,合模机构各构件尺寸为取舍值时的行程比要大于为原始值时的行程比. 图5是合模油缸推力放大倍数随动模板位移变化的曲线图,由图可以看出,两条曲线非常接近,合模机构各构件尺寸为取舍值时,机构在运动过程中合模油缸推力放大倍数略大于为原始值时的油缸推力放大倍数.
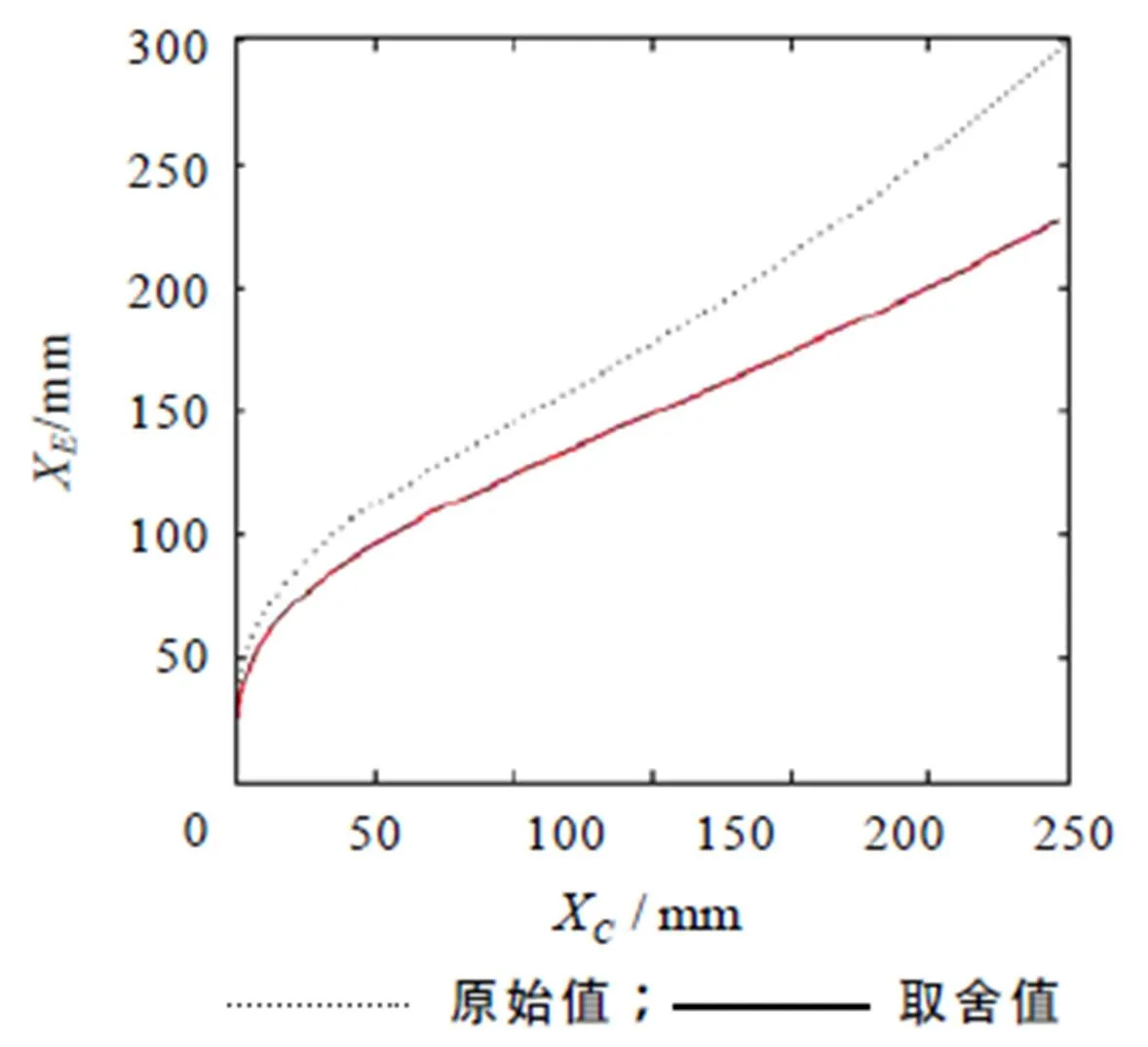
图4 位移曲线图

图5 油缸推力的放大倍数随动模板位移变化曲线图
6 结论
本文对80T注塑机五支铰斜排列双曲肘合模机构的运动特性及力学特性做了系统地分析,推导了出行程比和合模油缸推力放大倍数的表达式,并基于MATLAB对其进行了优化,提高了合模机构的工作效率,降低了能耗,并且为深入研究合模机构提供了理论基础. 下一步研究可以从设计新的优化算法方面入手,进一步对目标进行优化. 此外,还可以根据现有的优化参数建立三维实体模型并进行仿真,以检验优化效果.
[1] 北京化工学院,华南工学院. 塑料机械设计[M]. 北京:中国工业出版社,1986.
[2] 王兴天. 注塑技术与注塑机[M]. 北京:化学工业出版社,2005.
[3] 纪钰亮,王喜顺. 注塑机双曲肘合模机构的运动分析与优化设计[D]. 广州:华南理工大学,2013: 14-45.
[4] 孙靖民,梁迎春. 机械优化设计[M]. 5版. 北京:机械工业出版社,2012: 252-253.
[5] 王正林,刘明,陈连贵. 精通MATLAB[M]. 3版. 北京:电子工业出版社,2013: 227-228.
[责任编辑:韦 韬]
Optimal Design of the Five-Hinge Diagonal Row Hyperbolic Elbow Clamping Mechanism of Injection Molding Machines’ Clamping Systems Based on MATLAB
SHIShao-wei1, DUSi-ying1, DUYao-xue1, XUBai-ping2
(1. School of Mechanical and Electrical Engineering, Wuyi University, Jiangmen 529020, China; 2. Technology Development Center for Polymer Processing Engineering of Guangdong Colleges and Universities, Guangdong Industry Technical College, Guangzhou 510300, China)
This study analyses the movement characteristics and mechanical properties of the five-hinge diagonal row hyperbolic elbow clamping mechanism of the 80T injection molding machine, establishes the stroke-bore ratio and enlargement of the thrust of the clamping cylinder as the optimization goal, builds the optimization mathematical model of the clamping mechanism, determines the parametric design process, chooses reasonable constraint parameters according to geometry relationship, and uses the MATLAB software to optimize design for the clamping mechanism. After optimization, the stroke-bore ratio improves by 31.91% and the enlargement of the thrust of clamping cylinder by 0.46%. The improved design provides a theoretical basis for reducing the energy consumption of the five-point diagonal row hyperbolic elbow clamping mechanism and improving its working efficiency and the quality of injection molded parts.
injection molding machine; clamping system; MATLAB; optimal design
TH122
A
1006-7302(2014)04-0055-07
2014-07-03
国家自然科学基金资助项目(11272093);广东省自然科学基金资助项目(S2011010000411).
石绍伟(1989—),男,山东临沂人,在读硕士生,主要从事聚合物成型机械优化设计的研究;杜遥雪,教授,博士,硕士生导师,通信作者,主要从事聚合物成型加工CAD/CAE 的研究.
