面向核辐射领域的飞行监测仪的研究与设计①
2014-07-09杨冬黎侯跃新
杨冬黎, 杨 斌, 侯跃新
(1.东北石油大学计算机与信息技术学院,黑龙江大庆163318;2.黑龙江省科学院技术物理研究所,黑龙江哈尔滨150090)
0 引言
境复杂的核辐射区域执行核辐射剂量监测、放射源寻找等特殊任务,具有良好的机动性能和灵活性.
从20世纪90年代开始,国外就开展监测支援机器人的研究.其中代表性的支援机器人有俄罗斯科学院机器人[1]与控制技术研究所研制的专门用于处理局部核事故的机器人,它采用履带式结构并搭载可远程操控的机械手臂,能够安全地寻找和转移核事故中的伽马放射源;日本福岛核电站泄漏以后[2],日本政府向灾区投放核检测专用的Monirobo机器人;美国研发的一种名为 Phoenix40-A的小型遥控飞行器[3],已经可以监测所在区域的生物,甚至连人的呼吸都能监测到.国内有代表性的救援机器人多采用履带式结构,无法穿越复杂的地面环境,监测能力又显的不足.特别是针对核辐射监测任务,该领域中很少有机器人具备核辐射检测功能.
2 飞行监测仪的总体设计方案
本文设计立足于对核辐射事故的应急监测处理,将核辐射监测仪表搭载于四旋翼飞行器之上构成可移动飞行核辐射监测仪器,代替救援人员来执行核辐射监测、丢失放射源寻找等任务,可避免核辐射对救援人员的放射性危害.同时由于飞行器体积较小且具备悬停、垂直起降、侧飞、360度翻转等特殊飞行能力,运动过程不受地形和地面障碍物等对飞行器行进过程的影响,从而可以深入到地形环
同时四旋翼飞行器旋翼间距较大且机身面积较大,上方和下方均可搭载其他物体,因此可将进行核辐射剂量监测的中控单元至于机身上方,并与飞行器的飞行控制单元集成为一体,同时可共享飞行器的动力单元;通过GPS定位模块可实现对飞行器飞行位置的定位跟踪,并可将定位数据连同辐射剂量通过GPRS无线传输模块发送至设置在核辐射事故应急处理中心的数据服务器中;由于核辐射事故应急处理飞行器属于移动监测仪器,且其内部搭载的核辐射监测核心电路及工作方式与移动放射源监控终端仪表类似,因此可实现与辐射安全监控管理系统的无缝对接,把监测的数据实时传回监控管理中心.
3 飞行监测仪的具体设计
飞行监测仪的设计技术首先要考虑核辐射监测仪在飞行中稳定性的问题.其次,解决高压模块对无线控制信号的干扰.最后解决核辐射监测仪器在飞行过程中与地面核辐射事故应急指挥中心监控系统的交互问题.
为了保证飞行器行进过程的平衡性及稳定性,和核监测仪表在飞行状态下的正常飞行,设计的飞行监测仪采用四旋翼飞行器作为飞行载体,具有四个独立的旋翼和驱动仪器.旋翼在机体的前后左右四个方向对称分布,旋翼的半径都相同且都处于同一水平高度.其中旋翼1和旋翼3按照逆时针旋转,旋翼2和旋翼4按照顺时针旋转.在飞行监测仪器的支架端对称安装四个电机,支架中间安放飞行控制计算机和外部设备.其飞行控制结构如图1所示.
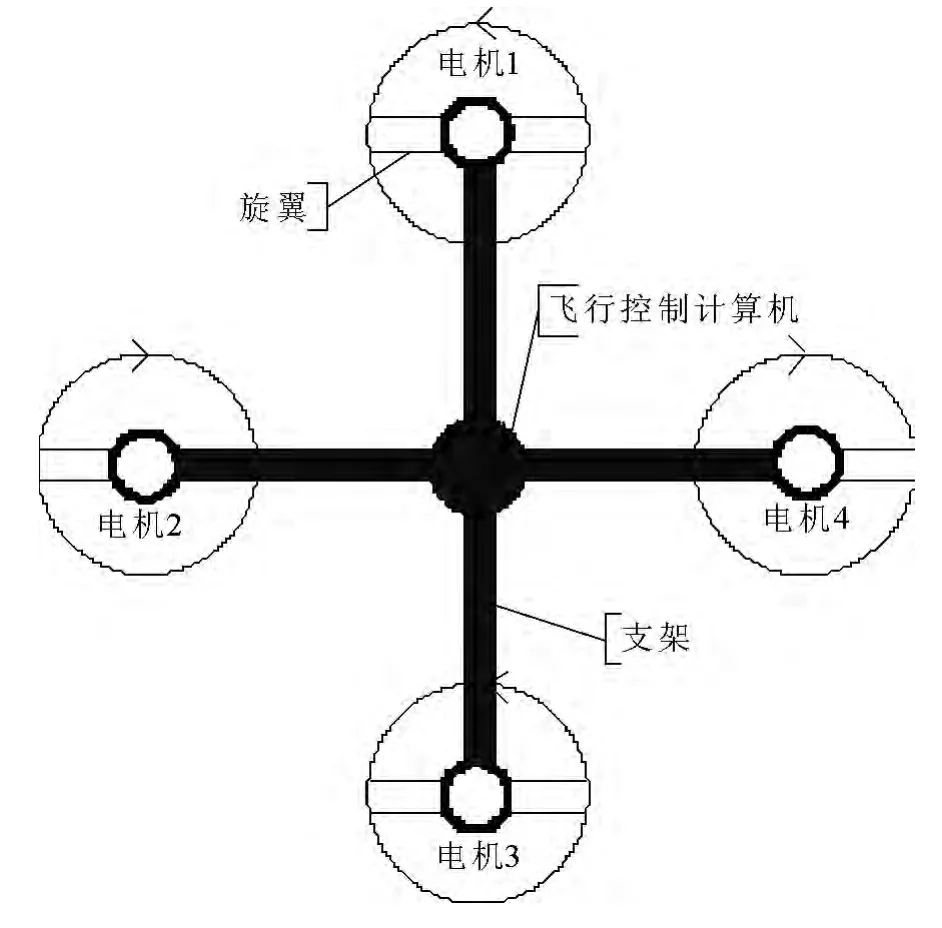
图1 四旋翼飞行控制结构图
设计时将核监测仪器的电路与飞行器的控制电路整合到一起,有效降低了中控单元的体积,使飞行器的配重更加均衡保证飞行器飞行时的稳定性,同时可以在支架下方挂载重量更多的物体.但是在电路整合设计方面要投入更多的人力和物力;在维护方面,如果核监测电路或飞行器的控制电路有一个发生故障,则需要进行整体拆卸并对每一个部件进行排查从而增加维修的难度.
在核监测部分采用GM(盖革)计数管作为辐射剂量监测仪器,并由高压模块为之提供工作的电压,但对高压模组工作时形成的电磁场进行屏蔽处理,防止其对无线控制信号的干扰,影响监测仪器的飞行控制.在机身电路板上集成GPS(全球定位系统)定位模块以及无线GPRS(通用分组无线服务)模块,通过GPS对飞行器的飞行位置进行定位跟踪.要实现飞行器与监控系统的双向通信,可以考虑增加无线GPRS模块作为二者沟通的途径.利用无线GPRS模块将计数管获得的数据及定位数据通过无线网络发送到设置在核辐射事故应急指挥中心的数据服务器,并由放射源安全监控管理系统调取数据显示在基于GIS(地理信息系统)发布的地图上面,支持实时辐射剂量数据的查询以及对辐射剂量分布情况的图形、数据表格等多种方式的展示查询,便于对核辐射事故影响范围的评估以及制定应急处理预案.
4 结语
本文设计的飞行监测仪将核监测技术、物联网技术以及飞控技术结合起来,不仅具有飞行器的悬停、翻转功能,而且可以深入核辐射地区进行监测,为人们及时传递有效数据,保障人民和周边环境的安全.
[1] 日本研发出新型机器人监测核电站厂房[EB/OL].http://www.chinanews.com/gj/3723154.shtml.
[2] 金茂菁,曲忠萍,张桂华.国外工业机器人发展态势分析[J].机器人技术与应用.2001,(2):6-8.
[3] 姜锡洲.一种用于核辐射环境下的小型应急救援及监测机器人[P].中国:201010159760.9,2011 -11 -09.
