异步电动机磁场定向矢量控制技术的建模与仿真
2014-07-06李一鸣
李一鸣
(湖南理工学院 计算机学院, 湖南 岳阳 414006)
异步电动机磁场定向矢量控制技术的建模与仿真
李一鸣
(湖南理工学院 计算机学院, 湖南 岳阳 414006)
阐述了异步电动机磁场定向矢量控制技术的工作原理, 给出了其数学模型和矢量控制方程. 在此研究基础上,在MATLAB/Simulink中对异步电动机磁场定向矢量控制系统进行了建模与仿真. 最后通过对转速和转矩以及三相定子电流仿真结果进行分析, 表明异步电动机磁场定向矢量控制系统具有良好的动态和静态特性.
异步电动机; 磁场定向; 矢量控制; 建模与仿真
引言
异步电动机又称感应电动机, 是由气隙旋转磁场与转子绕组感应电流相互作用产生电磁转矩, 从而实现机电能量转换为机械能量的一种交流电机. 异步电动机磁场定向矢量控制是将电机的定子电流矢量分解为产生磁场的电流分量 (励磁电流) 和产生转矩的电流分量 (转矩电流) , 并同时控制两分量间的幅值和相位, 即控制定子电流矢量[1]. 在本文当中, 首先简要的阐述了异步电动机磁场定向矢量控制的工作原理, 然后推断其数学模型, 并研究了矢量控制方程, 最后通过仿真软件建立异步电动机磁场定向矢量控制系统的仿真模型. 仿真结果表明异步电动机磁场定向矢量控制系统具有良好的动静态特性, 是一种优异的控制方法.
1 异步电动机磁场定向矢量控制的数学模型
1.1 异步电动机磁场定向控制的工作原理
异步电机的动态数学模型是一个高阶、非线性和强耦合的多变量系统. 上世纪70年代西门子工程师F.Blaschke首先提出异步电机矢量控制理论来解决交流电机转矩控制问题. 矢量控制实现的基本原理是通过测量和控制异步电动机定子电流矢量, 根据磁场定向原理分别对异步电动机的励磁电流和转矩电流进行控制, 从而达到控制异步电动机转矩的目的. 具体是将异步电动机的定子电流矢量分解为产生磁场的电流分量和产生转矩的电流分量并分别加以控制, 同时控制两分量间的幅值和相位, 即控制定子电流矢量, 所以称这种控制方式称为矢量控制方式. 简单的说, 矢量控制就是将磁链与转矩解耦, 有利于分别设计两者的调节器, 以实现对交流电机的高性能调速. 首先通过3s/2r变换, 变成静止的d-q坐标, 然后通过磁链方程产生的单位矢量来得到旋转坐标下的类似于直流机的转矩电流分量和磁场电流分量, 这样就实现了解耦控制, 加快了系统的响应速度. 最后再经过2r/3s变换, 产生三相交流电去控制电机, 这样就获得了良好的性能[2].
1.2 异步电动机磁场定向控制的数学模型
异步电动机在MT坐标系的电压方程为[3,4]:

异步电动机磁链方程为:

异步电动机电磁转矩为:

由于M轴取在ψr的轴线上, 显然有: ψrm=ψr, ψrt=0. 也就是说:

将式(4)和(5)代入式(2)得电压矩阵方程为:

上式0元素的出现, 消减了各变量之间的耦合影响, 使模型得到简化. 因此可得异步电动机简化转矩方程为:

运动方程为:

其中ω为转子电气旋转角速度;J为转动惯量;TL为负载转矩.
式(4)~(8)即为异步电动机在MT坐标系上的数学模型, 也就是按转子磁场定向的异步电动机的数学模型.
1.3 异步电动机磁场定向控制的矢量控制方程
由于异步电机的转子短路, 端电压urm=urt=0则电压方程为[5,6]:

磁链方程为:

由式(9)得:

联立式(11)和式(12) 得:

或

其中,Tr=LrRr为转子励磁时间常数.
T轴上的定、转子电流ist和irt的满足:

式(7)转矩方程式中ist即为定子电流的转矩分量. 当ism不变时, 即rψ不变时, 如果ist变化, 转矩Te立即随之成正比的变化, 不存在滞后.
由式(9)的第四行可以求得:


从式(6), (14)和(17)可以看出磁场定向矢量控制技术的控制方程式大大简化了异步电动机的控制问题.
2 异步电动机磁场定向控制在MATLAB中的仿真与分析
2.1 异步电动机磁场定向控制的仿真模型
利用MATLAB/SIMULINK对异步电动机矢量控制系统进行仿真,仿真模型如图1所示[7~9].其中仿真模型中电动机参数为:460V、60Hz、2对极,摩擦系数0.08,极对数2.
2.2 仿真结果及其分析
异步电动机磁场定向矢量仿真波形如图2~4所示,其中图2为转子转速仿真波形,图3为电磁转矩仿真波形, 图4为三相定子电流仿真波形. 从图2的电机转速仿真波形图中可以看到:电机转子转速从0开始加速,0.6s时电动机开始匀速转动,

图1 异步电机磁场定向矢量控制仿真模型
随后开始减速, 1.5s时转速为0. 从图3的电磁转矩仿真波形可以看到负载转矩从0变为正, 再变为负.1.5s时由于电机加载过大导致异步电机过载,转速变为0, 此时电流迅速增大.定子电流频率随转速的下降而变小,转矩和转速的变化引起给定信号频率的变化,其定子电流仿真波形如图4所示.

图2 转子转速仿真波形图
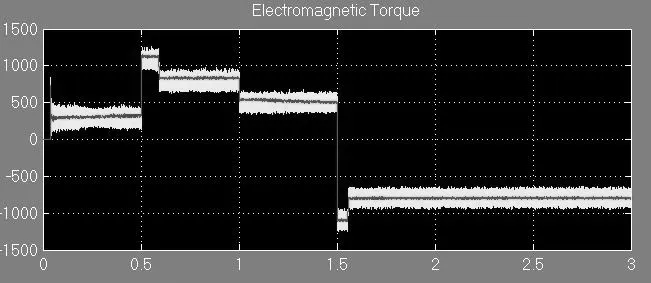
图3 电磁转矩仿真波形图

图4 三相定子电流仿真波形图
3 结束语
通过以上研究可以看出, 磁场定向矢量控制技术是一种以满足电机高性能为目的的控制方式,矢量控制技术成功解耦定子电流是保证实验成功的先决条件,因此对于磁场定向矢量控制系统的设计务必要引起重视.通过对计算机仿真结果的分析,表明异步电动机磁场定向矢量控制系统具有优越的的动态和静态性能,使异步电机能够像直流电机一样控制,弥补了异步电机在调速方面的缺陷,为异步电机调速提出了一种新的方式和思路.
[1] 杜永红, 李哲峰, 刘志刚. 异步电动机间接磁场定向控制双闭环系统[J]. 电工技术学报. 2009(05): 6~7
[2] 扶文静, 肖金凤, 刘 霏. 感应电机无速度传感器技术综述[J].湘潭师范学院学报(自然科学版). 2008(04): 7~9
[3] 陈 冰, 冬 雷, 杨 栋. 低速下异步电机无速度传感器矢量控制研究[J]. 西北大学学报(自然科学版). 2007(01): 10~12
[4] 范 岩, 何 勇. 基于DSP的转子磁场定向感应电机控制系统实现[J]. 微计算机信息. 2006(11): 4~6
[5] 董金华, 王 磊. 基于Matlab的感应电机磁场定向控制仿真[J]. 应用科技, 2003(12): 3~8
[6] 张保仓, 吴香花. 基于Matlab/GUI的异步电动机转子磁场定向仿真系统[J]. 重庆工学院学报(自然科学版) , 2008(15): 5-8
[7] 陈 斌. 异步电机矢量控制系统调速性能的仿真研究[J]. 科技信息. 2010(21): 2~5
[8] 魏 伟. 基于SIMULINK异步电机矢量控制仿真实验研究[J]. 实验技术与管理, 2009(01): 6~8
[9] 洪乃刚. 电力电子、电机控制系统的建模和仿真[M]. 北京: 机械工业出版社, 2010: 127~130
Modeling and Simulation of Field-oriented and Vector Control Technique for Asynchronous Motor
LI Yi-ming
(College of Computer Science,Hunan Institute of Science and Technology, Yueyang 414006, China)
The paper studies the working principle of field-oriented and vector control technology for asynchronous motor, and gives the mathematical model and the vector control equation. According to the above analysis the paper makes modeling and simulation for field-oriented and vector control system for asynchronous motor based on MATLAB/Simulink. Finally the simulation waveforms of rotational speed, torque and three-phase stator current, the simulation results are analyzed, and the results show that the field-oriented and vector control system for asynchronous motor has good dynamic and static characteristics.
asynchronous motor; field-oriented; vector control; modeling and simulation
TM46
A
1672-5298(2014)03-0037-04
2014-07-22
李一鸣(1979− ), 女, 湖南岳阳人, 硕士, 湖南理工学院计算机学院讲师. 主要研究方向: 计算机仿真技术
