模拟蓄电池特性的直流电源研究
2014-07-06白新龙谢学飞汪贵平
赵 轩,白新龙,谢学飞,汪贵平
(长安大学a.汽车学院,西安710064;b.电子与控制学院,西安710032)
电动汽车具有高效率、低噪声和低排放的优点,在新能源利用和环境保护方面具有较大的优势[1].台架试验作为电动汽车新技术开发过程中的重要试验手段,具有缩短开发周期、节约开发成本、与实际运行工况差异小等优点.在电动汽车驱动系统台架试验过程中,为了真实地模拟动力装置,一般采用蓄电池作为动力源,但蓄电池具有使用寿命短、占地面积大、充电时间长、成本高、安全性和可靠性差等缺点[2].何洪文等人[3]基于电压下降率、能量下降因子和温度下降率建立了蓄电池特性评价方法;Sun Li[4]、Verena[5]等人对镍氢和锂离子蓄电池充放电特性进行研究;Zhu Changqing等人[6]对直流稳压电源在不同负载下的稳压特性进行研究;Wang Yaqiong等人[7]设计了一种可控的直流稳压电源系统.目前对蓄电池特性和稳压直流电源系统已有学者进行研究,尚未见基于电动汽车驱动系统试验台对电源系统的研究,以及在实现稳压的前提下模拟蓄电池放电特性,因此本文对此展开研究.
1 总体设计
1.1 功能设计
电动汽车驱动系统试验台稳压电源应实现的功能包括:①输出电压高、电流大、功率大,输出电压平滑稳定;②输出电压与蓄电池放电特性相一致;③具有异常保护功能;④实现人机交互功能.
根据对电源系统设计指标的需求,可将其分为3个部分:①主电路.采用三相全控整流技术实现AC/DC转换,直流输出端采用阻容滤波方式,以得到较好的纹波系数[8-10];②主控制器.采用高性能Freescale9S12系列单片机,通过PWM 技术实现输出电压精确可控、模拟蓄电池放电特性的功能,并实现数据采集和处理功能;③人机接口.采用嵌入式系统MCGS智能界面.
1.2 电源系统总体结构
电源系统主要由蓄电池模块、模糊PID 控制模块、三相整流模块3个部分构成,具体结构如图1所示.蓄电池模块根据输入期望电压值和供电时间,通过试验模型数据库输出蓄电池电压值.然后将蓄电池电压值与电源系统实际输出电压值进行比较后的偏差值输入模糊PID 模块,PID 模块将输入的偏差值经计算后输出三相整流模块的控制电压,控制电压经晶闸管控制模块控制了晶闸管导通角,从而实现对输出电压的精确控制.
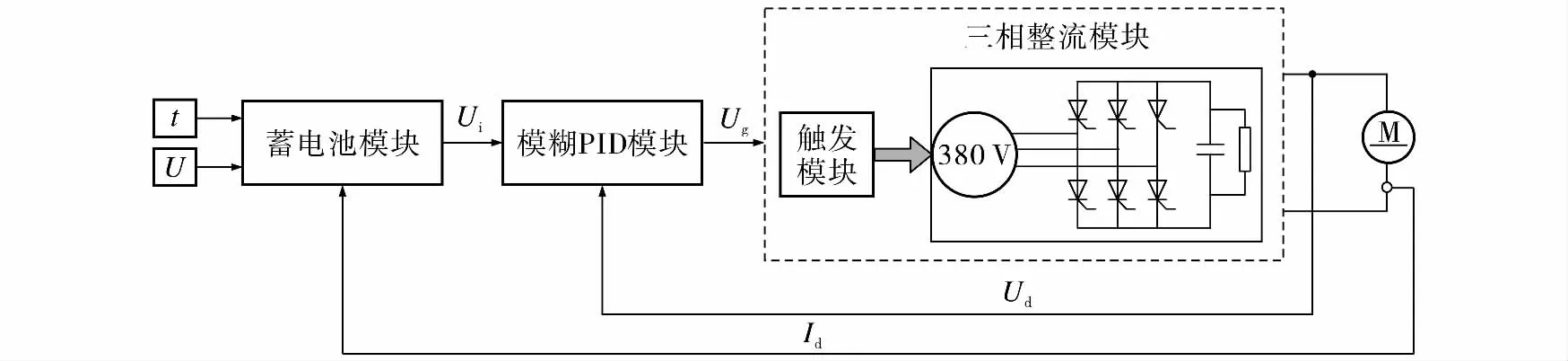
图1 电源系统总体结构图Fig.1 Overall structure of power system
2 控制器硬件设计
控制系统硬件电路总体结构如图2所示.该系统由4个部分组成:①Freescale S12单片机最小系统;②输入信号调理电路模块.实现将传感器信号转换成0~5V 的标准电压信号;③数据通信电路模块.实现MCGS智能仪表与S12单片机的实时数据通讯;④D/A 信号调理电路模块.将S12单片机输出的PWM 信号转化为0~12V 的电压信号,控制MZKS-800晶闸管导通角.
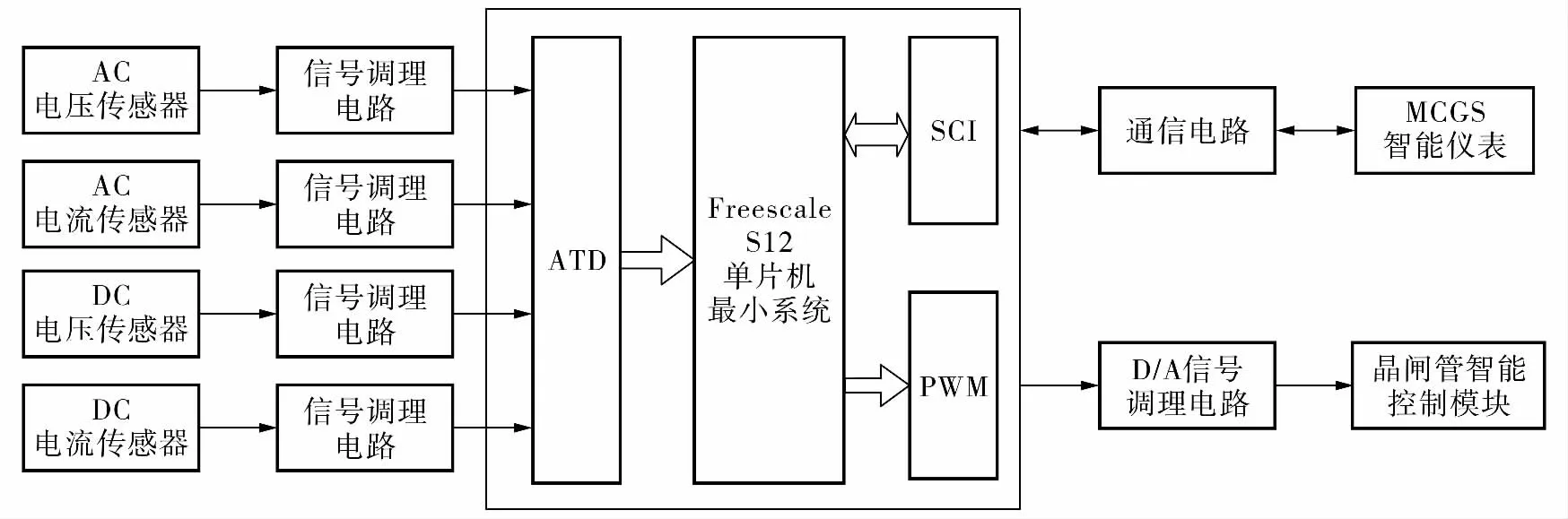
图2 系统控制器结构图Fig.2 Structure of system controller
3 系统软件设计
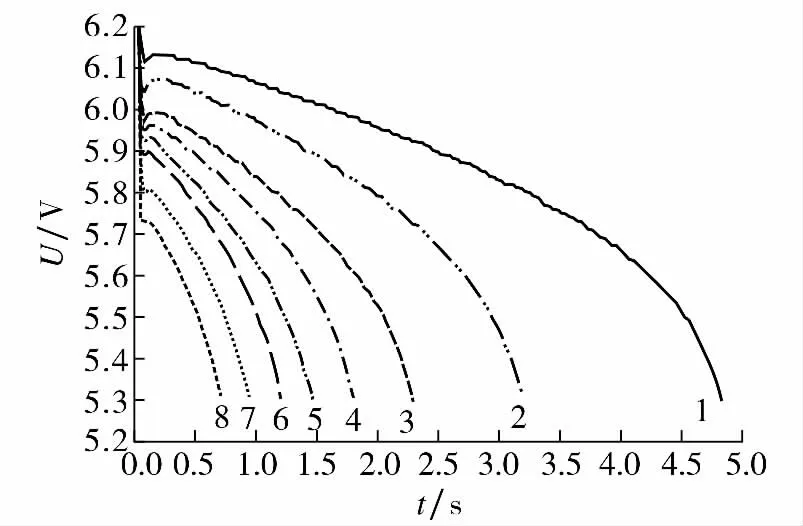
图3 蓄电池端电压与时间的关系曲线Fig.3 The relation of battery voltage and time
3.1 蓄电池放电特性研究
本文基于蓄电池综合测试系统对6V-240AH 型蓄电池进行放电试验.考虑到蓄电池使用条件下温度变化不大,故将试验环境温度设为20~25 ℃,循环次数为10~50次.试验获得的蓄电池端电压与放电时间曲线如图3所示.
3.2 模糊PID控制策略
考虑到电源系统具有运行状况多变、控制对象非线性、控制精度要求高等特点,因此采用模糊自适应整定PID控制策略控制输出电压.模糊控制器的输入变量为蓄电池输出电压模拟值与电源系统实际输出电压值的偏差e以及偏差值的变化率ec;模糊控制器的输出变量为比例系数、积分系数和微分系数的修正值ΔKp,ΔKi,ΔKd.模糊控制器由模糊化模块、模糊规则模块和清晰化模块组成.
1)模糊化模块.①输入变量模糊化:偏差值e和偏差值的变化率ec的变化范围在模糊集上的论域为{-3,-2,-1,0,1,2,3},对应的模糊集为负大(NB)、负中(NM)、负小(NS)、零(ZO)、正小(PS)、正中(PM)、正大(PB).②输出变量模糊化:ΔKp,ΔKi,ΔKd变化范围定义为模糊集上的论域分别为{-0.3,-0.2,-0.1,0,0.1,0.2,0.3},{-0.06,-0.04,-0.02,0,0.02,0.04,0.06},{-3,-2,-1,0,1,2,3},对应的模糊集为负大(NB)、负中(NM)、负小(NS)、零(ZO)、正小(PS)、正中(PM)、正大(PB).输出变量隶属度函数如图4所示.

图4 ΔKp,ΔKi,ΔKd 模糊量隶属度函数Fig.4 Fuzzy membership functions of parameterΔKp,ΔKiandΔKd
2)模糊规则模块.模糊控制器的核心是模糊控制规则,对ΔKp,ΔKi,ΔKd设计模糊规则表,如表1~表3所示.其中ΔKp,ΔKi,ΔKd分别为模糊控制器对PID 调节器参数Kp,Ki,Kd的修正模糊集合,根据模糊控制规则表,将偏差值e和偏差值的变化率ec经过近似推理后输出ΔKp,ΔKi,ΔKd的模糊集合,模糊集合再经清晰化模块处理后映射出ΔKp,ΔKi,ΔKd的等效数字值,本文选用最大隶属度法进行清晰化处理.
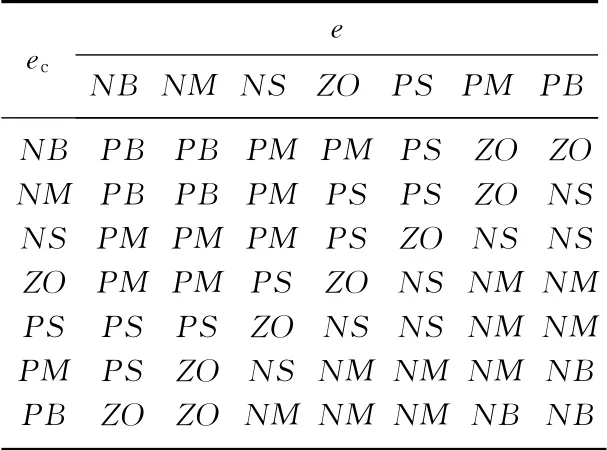
表1 调节ΔKp 的模糊控制规则Tab.1 Fuzzy control rules ofΔKp
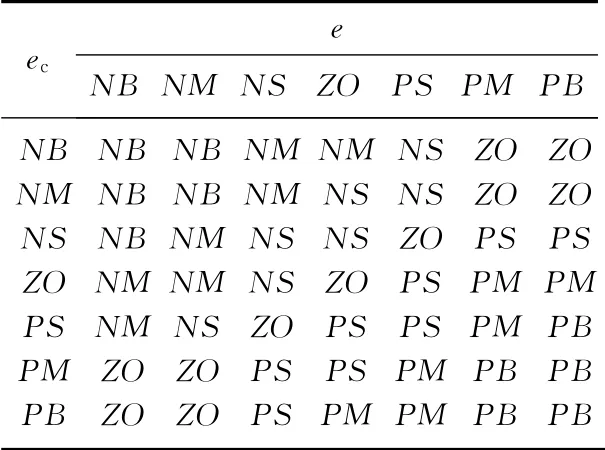
表2 调节ΔKi 的模糊控制规则Tab.2 Fuzzy control rules ofΔKi
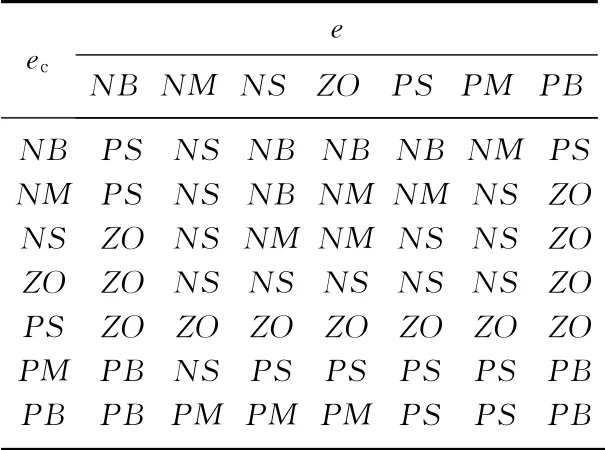
表3 调节ΔKd 的模糊控制规则Tab.3 Fuzzy control rules ofΔKd
3.3 仿真实验
为了验证本文设计的模糊自适应整定PID 控制器超调量、响应速度等系统动态响应特性,基于Matlab/simulink对电源系统进行建模仿真,在单位阶跃信号的激励下,仿真结果如图5所示.
由图5 计算可知,传统PID 控制器最大超调量11.5%,调节时间4.56s;模糊自适应整定PID 控制器最大超调量1.38%,调节时间2.24s.模糊PID 控制器最大超调量和调节时间明显小于传统PID 控制器.因此说明模糊自适应整定PID 控制器具有系统动态响应速度快、响应时间短、超调量小、抗干扰能力强、较好的动静态性能等优点,能够满足电源系统对控制器的要求.
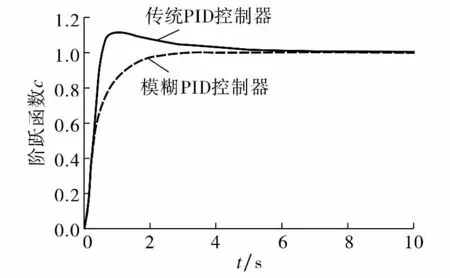
图5 电源系统仿真结果Fig.5 Simulation results of power system
3.4 MCGS智能仪表界面设计
MCGS智能仪表界面主要包括主界面和历史曲线界面.主界面是电源系统智能仪表界面中最重要、使用频率最高、信息量最大以及实现人机交互的界面[11],主界面显示的内容主要包括电源系统AC 输入电压、电流,DC输出电压、电流,电压给定模块以及历史曲线界面显示控件等.历史曲线界面主要功能是实现各种参数历史数据存储和显示功能.主界面如图6所示.

图6 MCGS主界面Fig.6 Main interface of MCGS
4 系统试验
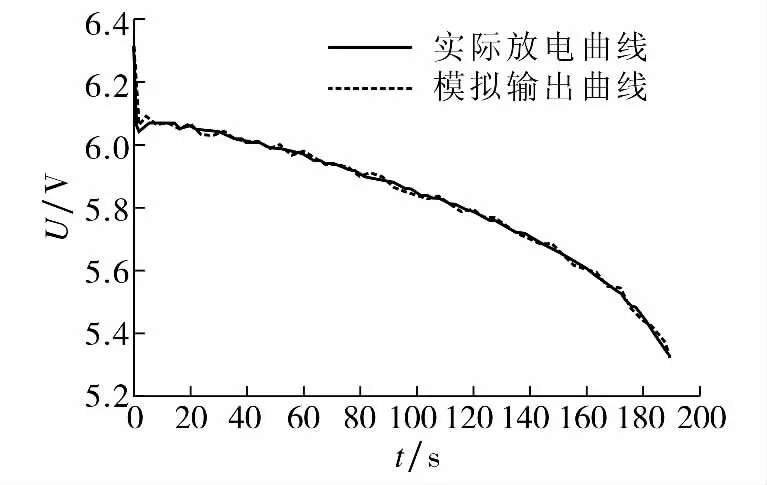
图7 实际放电与模拟输出U-t曲线对比图Fig.7 The comparison of U-t output curves between the reality and the simulation
为了检验电源系统能否达到预期的控制效果和控制精度,对电源系统进行了试验研究.首先通过MCGS智能仪表对电源系统的参数进行设置,蓄电池选择6V-240AH 型,放电电流选择50A 恒流放电,然后将电源系统实际放电电压曲线与蓄电池放电特性曲线进行对比,对比结果如图7 所示.试验结果表明:在50A 恒流放电情况下,模拟电源实际放电电压曲线与蓄电池实际放电曲线变化规律基本一致,其最大绝对误差为0.27V,最大相对误差为3.91%.因此说明电源系统在模糊自适应整定PID 控制器的调节下能够稳定工作,实现了对输出电压的精确调节,能够实时准确地模拟蓄电池放电特性.因此说明本文设计的电源系统能够作为电动汽车驱动系统台架试验的直流供电电源,该系统的研究在电动汽车领域具有广阔的前景和实际应用价值.
[1] EHSANI M,GAO Yimin,EMADI A,et al.Modern electric hybrid electric and fuel cell vehicles[M].2nd ed.USA:CRC Press,2010:52-56.
[2] 钱良国,郝永超,肖亚玲.锂离子等新型动力蓄电池成组应用技术和设备研究最新进展[J].机械工程学报,2009,45(2):2-11.
[3] 何洪文,余晓江.电动车辆动力电池的性能评价[J].吉林大学学报:工学版,2006,36(5):659-663.
[4] SUN Li,JIN Peng,TAN Qiaolin.The simulation of NiMH battery performance for HEV applications[C]//23rd International Battery,Hybrid and Fuel Cell Electric Vehicle Symposium and Exposition 2007-Sustainability:The Future of Transportation,EVS 2007.Anaheim,CA,United States:Electric Drive Transportation Association,2007,4:2441-2445.
[5] VERENA K,MARTEN B,GÖRANL L.Li-ion battery performance in electric vehicles[C]//Advanced Automotive Battery Conference.Orlando,FL,United States:Advanced Automotive Batteries.2010:107-112.
[6] ZHU Changqing,SHI Youren,YE Xiuxi,et al.An analysis of the load characteristic of the purified regulated power supply[C]//8th International Conference on Electronic Measurement and Instruments.Xi’an:IEEE,2007:1313-1317.
[7] WANG Yaqiong,CUI Zongchao.Design of dual DC regulated power supply based on MCU dsPIC30F3011[J].Adv Mater Res,2013,722:71-74.
[8] 王一农,杜世俊,刘小宁.电容滤波型三相桥式整流电路的电压分析[J].合肥工业大学学报:自然科学版,2005,28(5):554-557.
[9] CLARE J C,DAVIS R M.Prediction of supply current waveforms and harmonics for rectifier circuits with capacitive smoothing[C]//Proceedings of the 5th European Conference on Power Electronics and Applications.Brighton,Engl:IEEE,1993,7:200-205.
[10] 杜慧聪,刘方军,张伟,等.150kV 高压逆变电源倍压整流电路仿真[J/OL].北京航空航天大学学报,[2013-12-26].http://www.cnki.net/kcms/detail/11.2625.V.20131206.1627.002.html
[11] 王换换.MCGS下的纯电动汽车智能仪表设计[D].西安:长安大学,2010:55-60.
