中值滤波在智能车图像处理中的应用
2014-07-04昆明理工大学机电工程学院云南昆明650500
蒋 旭,吴 涛(昆明理工大学机电工程学院,云南 昆明650500)
0 引言
智能车摄像头对图像进行采集的过程中,由于来自系统内部、外部诸多因素的干扰和光学系统成像时的失真,智能车获取的图像与原始图像相比较发生了降质和畸变,使智能车从中提取到的道路信息减少甚至造成失真。为了让智能车获取更为准确的道路信息,需对图像进行降噪、锐化等处理,以增强图像。随着计算机的发展,降噪方法层出不穷,但是很多方法都是基于计算机发展起来的,运算量都相对比较大,现阶段应用比较多且较为简单的有空间邻域平均、频率域低通道滤波和多幅图像平均等,但处理后会使图像产生模糊效应,需进行锐化处理,因此,会增加运算量。而智能车赛道边线的提取是一个简单而又十分重要的过程,只需对赛道边线提取并处理,对点、线和尖顶等细节不做处理。
1 中值滤波在智能车图像处理中的应用
中值滤波[1]首先是被应用于一维信号[2]处理技术中,后来被二维信号处理[3-4]技术所使用。在一定的条件下,可有效地克服线性滤波器所带来的图像细节模糊,且对滤除脉冲干扰及图像扫描噪声最为有效。所谓的“中值”是指将一个数据序列中的数据按照从大到小(或者相反)的顺序排列,如果这个序列的长度为奇数,则排在中间那个数就是此序列的中值;如果序列的长度为偶数,可以定义处于中间2个数的平均数为中值。
1.1 一维中值滤波
最简单的办法就是用一个含有奇数点的条形或者方形滑动窗口[1],在智能车摄像头采集回来的图像上逐点滑动,将窗口正中那点的值用窗口内各点灰度的中值替代。在一般情况下,可以这样定义一维中值滤波:设有一个一维序列 {x1,x2,x3,…,xn},取窗口长度为奇数m,对此序列进行中值滤波,就是从输入序列中相继抽出 m 个数,xi-v,…,xi-1,xi,xi+1,…xi+v,i为窗口的中心位置,v=(m-1)/2,再将这m个点按其数值大小排列,取其序号为正中间的那个数作为滤波输出。用数学公式表示为:
将智能车摄像头采集回来的图像进行横向一维中值滤波,其降噪前后的效果对比如图1所示。由图1可知,横向像素相对变得平和,独立噪点基本被消除。

图1 横向一维中值滤波的效果对比
将智能车摄像头采集回来的图像进行纵向一维中值滤波,其降噪前后的效果对比如图2所示。由图2可知,纵向像素相对变得平和,独立噪点基本被消除。

图2 纵向一维中值滤波的效果对比
1.2 二维中值滤波
采用条形窗口的办法是一维中值滤波,将这种方法推广到二维,采用方形窗口,就形成二维中值滤波。对二维序列{xi,j}进行中值滤波时,滤波窗口也是二维的,二维数据的中值滤波可以表示为:

A 为滤波器的窗口,窗口的尺寸i,j∈Z,xi,j∈A,可取3×3,5×5或者更大。滤波窗口[5]的形状也不一定拘泥于正方形,可以有多种不同的形状,如线状、方形、圆形和十字形等。在实际应用中,对于有缓变的较长轮廓线物体的图像,采用方形或者圆形窗口为宜;对于包含顶尖角物体的图像,适宜用十字形窗口,如图3所示。
将智能车采集到的图像进行十字形窗口中值滤波,其前后对比如图3所示。在细节的地方,像素点相对减弱,对比度也相对减弱,但是噪点基本被消除,智能车在对赛道信息[6]的提取过程中只需对图像进行二值化,即可准确获取赛道信息,从很大程度上减弱了噪点对赛道信息的干扰,从而提高了微控制器的控制效率[7]。

图3 十字形窗口滤波的前后对比
2 中值滤波图像频谱分析
中值滤波常用来减弱随机干扰或孤立噪声,对于其性能的分析,由于中值滤波是非线性滤波,因此,要得到一般的定量结论比较困难。
从频域[8]的角度来分析,由于中值滤波是非线性的,在输入和输出之间不存在一一对应的关系,故不能用一般线性滤波器频率特性的研究方法。为了能够直观定性地看出中值滤波输入和输出频谱变化情况,采用总体试验观察方法。
设X(u,v)为输入图像频谱,Y(u,v)为输出图像频谱,参照线性系统的方法,定义为:

H(u,v)为中值滤波器的频率响应特性。经中值滤波后,图像降噪频谱如图4所示。实验表明,H(u,v)与X(u,v)有关,呈不规则波动不大的曲线,其均值比较平坦。可以认为经中值滤波后,传输函数近似为“1”,即中值滤波对信号的频域影响不大,频谱基本不变。
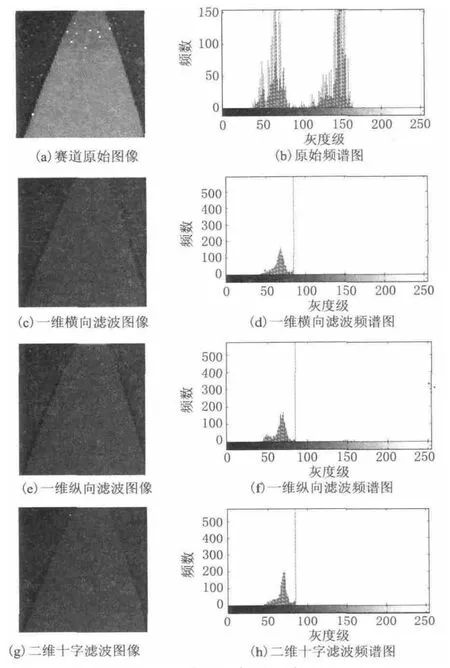
图4 图像降噪频谱示意
由图4可知,一维中值滤波对图像的像素有一定的减弱作用,二维中值滤波从很大程度上对图像的像素有减弱作用,且赛道上的噪点基本被消除。而智能车在赛道信息的提取过程中只需要把赛道和边界区别开来,对细节无需做处理,可见中值滤波在智能车图像降噪过程中有很好的实用性和可行性。
3 结束语
总体来说,和低通滤波器相比较,中值滤波能够较好地保留原图像中的跃变部分,非常有效地去除孤立噪声,但在使用中值滤波时必须注意如何保持图像中有效的细线状物体。而智能车对赛道提取的过程中重点是能准确地对赛道边线进行识别和提取,不需要对赛道的微小细节做处理。中值滤波可满足智能车图像处理的要求,有很好的降噪效果,能为智能车提供更为准确的道路信息。
[1] 朱秀昌,刘 峰,胡 栋.数字图像处理与图像通信[M].北京:北京邮电大学出版社,2008.
[2] 许录平.数字图像处理学习指导[M].北京:科学出版社,2009.
[3] 刘俊山,李旭辉.数字图像处理[M].北京:清华大学出版社,2013.
[4] Kenneth R Castleman.数字图像处理[M].朱志刚,等译.北京:电子工业出版社,2011.
[5] 刘 瑜,朱秀珍.数字图像处理与图像通讯实验[M].北京:北京邮电大学出版社,2008.
[6] 王 建,张晓炜,杨 锦,等.基于视觉传感器的智能车控制算法设计[J].微型机与应用,2010,29(20):74-76.
[7] 王宜怀,吴 瑾,蒋银珍.嵌入式系统原理与实践[M].北京:电子工业版社,2012.
[8] 白 龙,杜向党,张 宇,等.基于图像的SCARA机器人的视觉伺服系统仿真[J].机械与电子,2012(10):75-78.
