近距格斗空空导弹三自由度弹道仿真建模
2014-07-03周须峰谢永强
周须峰,易 华,谢永强
(1.中国空空导弹研究院,河南 洛阳 471009;2.空军装备研究院 总体所,北京 100076)
准确、快速的弹道仿真模型是空空导弹攻击区实时计算的基础。导弹的详细六自由度仿真模型可以准确计算弹道,然而计算耗时较长,无法满足空空导弹攻击区实时计算的要求,因此空空导弹攻击区通常由火控系统对存储的事先计算好的攻击区数据进行插值得到,但精度较差,对于近距格斗空空导弹弹显得尤为明显。传统的三自由度弹道模型采用质点弹道,计算速度很快,在目前硬件水平下能够满足实时计算的快速性要求。但新型近距格斗空空导弹具有新的特性[1]:
1)由于采用推力矢量控制技术,具有了大离轴甚至越肩发射能力,在这种情况下弹道初始段通常进行大攻角、大过载飞行,姿态变化剧烈;
2)可进行空间大角度转弯飞行,具有真正意义上的全向攻击能力;
3)弹体上安装捷联惯导系统,制导指令为弹体坐标系内的法向指令加速度;
4)导引头位标器的框架角有限,在飞行过程中当弹目连线与弹轴夹角超过最大框架角时,导引头会丢失目标,导致脱靶;
这些新的特点决定建立新型近距格斗空空导弹的精确的三自由度弹道仿真模型必须包含弹体姿态信息,有别于传统质点弹道仿真模型。为此,本文将基于三自由度仿真建模理论,在力矩平衡和导弹无滚转运动假设的基础上,将导弹气动力与推力矢量控制力统一建模,考虑弹体过载响应特性,引入四元数来描述导弹速度方向,解决运动方程奇异问题,通过坐标变换方法,建立包含弹体姿态信息的精确三自由度弹道仿真模型。
1 坐标系定义
坐标系及坐标变换是建立弹道仿真数学模型的基础,建模中用到的几个坐标系定义如下:
1)惯性坐标系Ox0y0z0:原点O 取导弹发射时刻目标在地面投影点位置,Ox0轴位于地面上,可指向任意方向,Oy0轴垂直地面向上,Oz0轴与Ox0、Oy0轴构成右手坐标系。
2)弹道坐标系Ox2y2z2:原点O 位于导弹质心,Ox2轴与导弹速度矢量重合,Oy2位于包含速度矢量的铅垂面内且垂直于Ox2轴,向上为正,Oz2轴与Ox2、Oy2构成右手系。
3)弹体坐标系Ox1y1z1:原点O 位于导弹质心,Ox1轴与弹体纵轴重合,指向导弹头部为正,Oy1轴位于弹体纵向对称平面内且与Ox1垂直,向上为正,Oz1轴与Ox1、Oy1构成右手系。三自由度建模时认为导弹纵向对称平面始终位于铅垂面内。
4)视线坐标系Oxsyszs:原点O 位于导弹质心,Oxs轴指向目标,Oys位于包含视线的铅垂面内且垂直于Oxs轴,向上为正,Ozs轴与Oxs、Oys构成右手系。
2 三自由度仿真模型
按照三自由度建模理论,考虑新型近距格斗弹的自身特点,可建立的如图1 所示的三自由度弹道仿真模型框图:首先根据弹目相对运动关系得到惯性系内的视线角速度,再根据导引律,形成弹体系内的指令加速度,该指令加速度经过一个二阶环节后得到弹体系内的所需响应加速度,然后由气动力和推力模型,得到导弹可实现的实际法向力及相应的轴向力,最后在惯性系内积分导弹运动方程,完成一步仿真计算。循环上述过程直至满足弹道仿真终止条件。
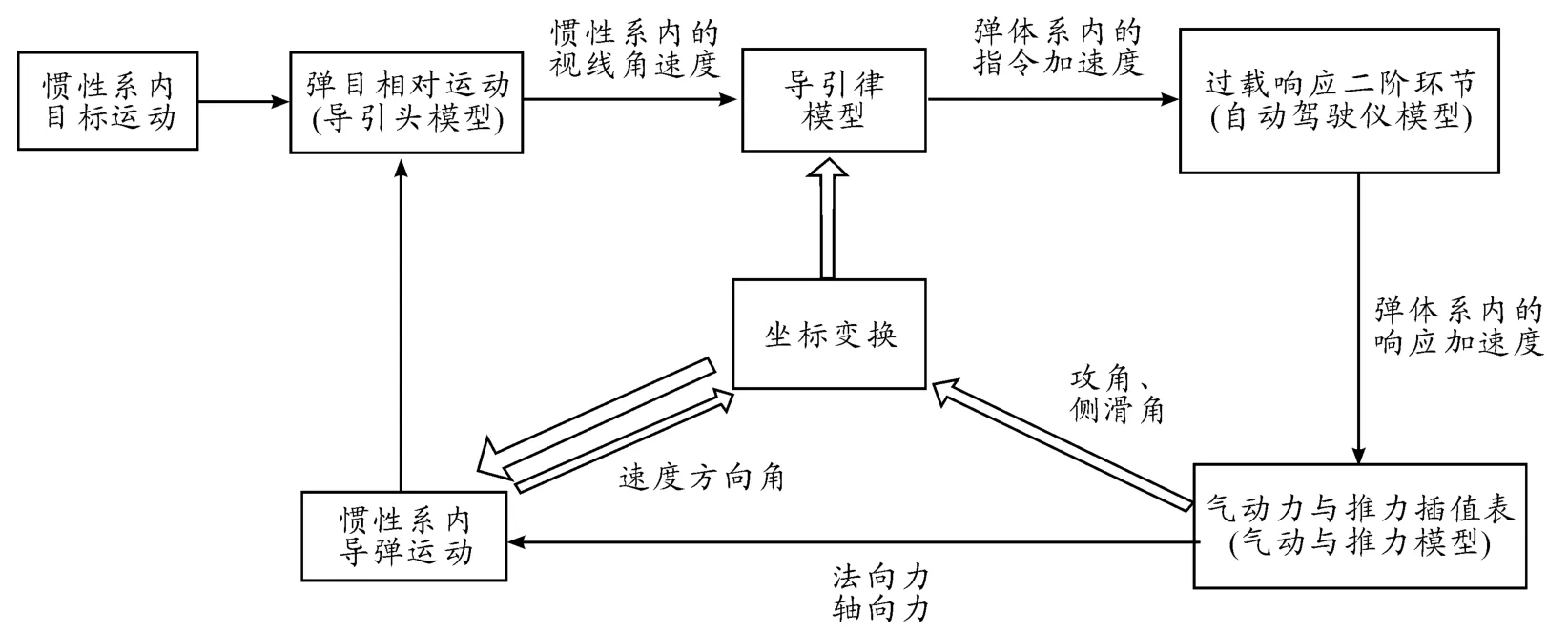
图1 三自由度弹道仿真模型框图
2.1 目标运动模型
在近距格斗仿真中目标按质点考虑,采用圆周机动模型如下

式中:θt和ψt分别为目标的速度倾角和速度偏角;ny、nz为目标俯仰、偏航方向的机动过载;vt为目标速度;xt、yt、zt为目标在惯性坐标系内的位置分量。
2.2 弹目相对运动模型
与导弹的过载响应特性相比,导引头的动力学延迟可以忽略,因此,在三自由度建模时近似认为导引头位标器可以无误差地跟踪目标线,惯性坐标系内视线角速度可以用导弹和目标的相对运动参数表示为

2.3 导引律模型
采用实际导引律模型——真比例导引(TPN),在视线坐标系内的指令加速度矢量为

考虑近距空空导弹通常采用固体火箭发动机,导弹轴向加速度无法控制,只能通过姿态的改变来控制弹体的2 个法向加速度,来实现TPN。考虑重力加速度,视线坐标系内的指令加速度可表示为


由式(4)可得到弹体系内两个法向指令加速度。
2.4 过载响应模型
考虑近距格斗导弹的大攻角、大机动飞行特性,为了更准确地描述导弹的姿态动力学特性,将弹体过载响应模型简化为如下二阶动态环节

参数、可以由六自由度仿真模型通过试验的方法确定,也可以由气动参数、控制参数综合得到。过载响应模型的输入为导引律给出的弹体法向指令加速度,输出为弹体的响应加速度。
2.5 气动力/推矢控制力模型
新型近距格斗导弹采用燃气舵形式的推力矢量控制方式,与六自由度模型中使用的推矢控制力模型保持一致,单独燃气舵的法向力和阻力模型

式中:δi第i 个燃气舵偏转角度;ai、bi是多项式系数。
假设导弹飞行过程中始终处于“力矩平衡”状态,即每一时刻导弹俯仰力矩Mz1=0。在发动机工作阶段,燃气舵产生的法向力对导弹质心形成力矩,在攻角α、舵偏角δ 和马赫数Ma 的飞行状态下,导弹受到的俯仰力矩可表示为

式中:L(δ)为舵偏δ 时燃气舵产生的法向力;d 为燃气舵距弹体质心的距离;Mz1f(α,δ,Ma)为气动力产生的俯仰力矩。
可采用迭代算法由式(8)求出当攻角为α、Mz1=0 时的舵偏角δ,即可以求出攻角α 所对应的平衡舵偏角。为了计算的快速性,将气动力/推矢控制力模型建立成一个考虑推矢控制力的气动力插值表,通过插值算法,给定一个法向力,即可得到相应攻角和阻力。
2.6 发动机推力模型
对于固体火箭发动机,推力和燃气流量基本不随高度和速度变化,推力模型仅涉及发动机推力和秒流量随时间的变化。与六自由度模型中的发动机模型保持一致,以插值表的形式进行建模,给定仿真时间,得到推力大小和秒流量。
2.7 导弹运动模型
为了避免欧拉角描述的导弹运动方程出现奇异问题,在惯性坐标系内建立导弹运动方程为

2.8 速度方向的四元数表示
考虑到新型近距格斗导弹具有大机动转弯飞行能力,其飞行过程中可能出现弹道倾角等于90°的情况,为了避免用弹道偏角、弹道倾角表示的导弹运动方程可能出现的奇异问题,以四元数来描述导弹的速度方向。速度方向的四元数初值可以表示为

其中ψ0、θ0分别为初始弹道偏角和弹道倾角。
导弹运动过程中,速度矢量绕垂直于速度矢量和加速度矢量构成平面的法向进行转动,转动角速度可以用导弹

因此,描述导弹速度方向的四元数的分量形式运动方程为

以四元数表示的惯性坐标系到弹道坐标系的坐标变化矩阵可以用描述速度方向的四元数表示为[2]

2.9 攻角和侧滑角的计算
新型近距格斗导弹具有滚转稳定控制系统,可以忽略导弹在飞行过程中的滚转,三自由度建模时认为导弹对称平面始终位于铅垂面内,因此攻角和侧滑角就描述了弹体坐标系与弹道坐标系之间的角度关系。
攻角和侧滑角可以由制导所需总攻角和速度滚转角得到。导弹总攻角αA和速度滚转角γv可以由制导需用加速度any、anz及气动力插值函数到

由总攻角aA和速度滚转角γv,利用球面三角形公式可得到导弹的攻角和侧滑角

2.10 坐标变换
坐标变换是本文所建立的包含姿态信息的三自由度仿真模型的重要组成部分,可以通过如下坐标变换得到同一矢量在不同坐标系内的坐标分量之间的关系。
从弹道坐标系Ox2y2z2到弹体坐标系Ox1y1z1的坐标变换矩阵可以用导弹攻角α 和侧滑角β 描述为:T12(α,β),从弹道坐标系到弹体坐标系的变换矩阵为:T21=(α,β)。
从惯性坐标系Ox0y0z0到弹道坐标系Ox2y2z2的坐标变换矩阵可以用速度方向四元数Q 描述:T20(Q);从弹道坐标系到惯性坐标系的变换矩阵为:T02=(Q)。
从惯性坐标系Ox0y0z0到弹体坐标系Ox1y1z1的坐标变换矩阵可以用导弹攻角α、侧滑角β 和速度方向四元数Q 描述为:T10(α,β,Q)=T12(α,β)T20(Q),从弹体坐标系到惯性坐标系的变换矩阵为:T01(α,β,Q)=(α,β,Q)。
从弹体坐标系Ox1y1z1到视线坐标系Oxsyszs的坐标变换矩阵可以用两个离轴角q1、q2描述为:Ts1(q1,q2),从视线系到弹体系的变换矩阵为(q1,q2)。
3 模型验证与分析
为了验证所建立的三自由模型的准确性以及引入四元数在解决导弹运动方程奇异问题上的有效性,选取以下两个条件进行仿真,并与六自由度仿真模型进行对比。
条件1:设导弹在惯性坐标系内的初始位置(单位:m),初始速度(单位:m/s);目标在惯性坐标系内的初始位置,初始速度,目标直线飞行,分别以三自由度模型和六自由度仿真模型进行弹道计算,在相同计算机上相同仿真步长情况下,耗时分别为0.002 16 s 和0.020 31 s,部分弹道参数计算结果对比如图2 所示(其中下标6 代表六自由度仿真模型)。
条件2:设导弹在惯性坐标系内的初始位置(单位:m),初始速度(单位:m/s);目标在惯性坐标系内的初始位置,初始速度,且目标以5g 过载进行机动。分别以三自由度模型和六自由度仿真模型进行弹道计算,耗时分别为0.002 63 s和0.024 62 s,部分弹道参数计算结果对比如图3 所示。
从仿真结果可以看出:本文建立的三自由度模型由于采用了四元数描述导弹速度方向,避免了用弹道偏角、弹道倾角描述的导弹运动方程在弹道倾角90°时出现的奇异问题;三自由度弹道仿真模型能够给出导弹的近似姿态信息,所计算得到导引头位标器相对弹体的离轴角与六自由度模型计算值基本一致;三自由度弹道仿真模型的计算精度与六自由度弹道仿真模型相比并没有下降很多,可以比较准确的计算导弹的飞行轨迹、飞行速度、离轴角等重要弹道参数;相比六自由度弹道仿真模型,三自由弹道仿真模型的计算速度大约提高了一个数量级。计算速度提高的主要原因是六自由度仿真模型中对大量气动力、气动力矩数据的高维插值处理比较费时,而三自由度模型中事先按力矩平衡假设得到了气动力插值模型,并且在仿真中仅进行一维插值,另外,三自由度模型相比六自由度模型少了三个姿态动力学微分方程,减少了运算量。
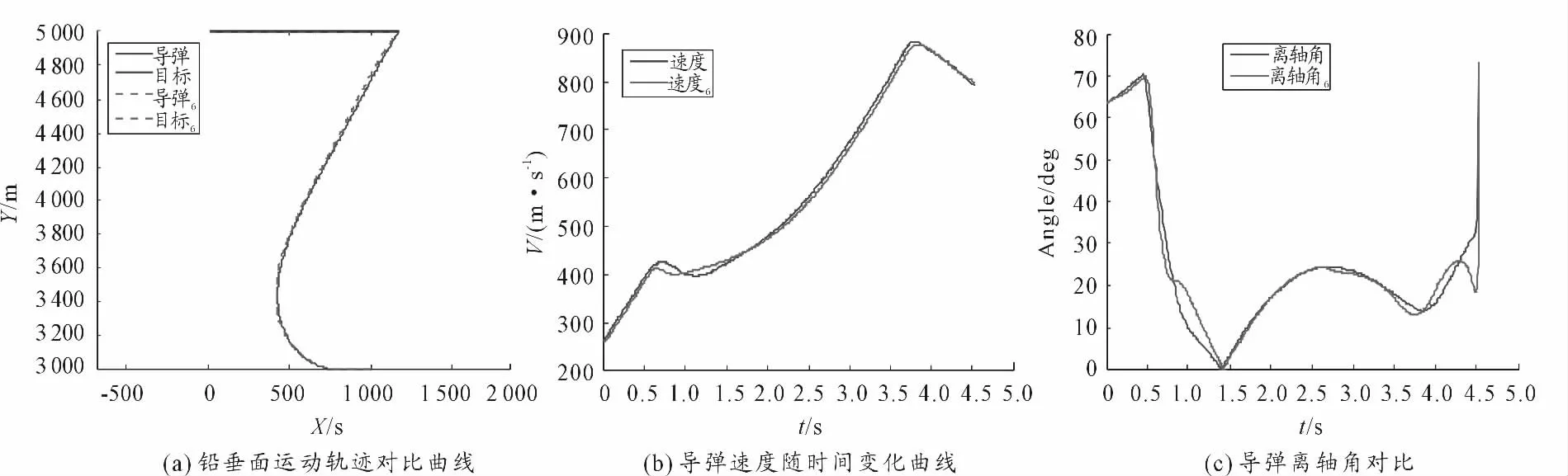
图2 条件1 计算参数结果

图3 条件2 计算参数结果
4 结束语
通过与六自由度弹道模型进行仿真对比可以看出,本文所建立的包含导弹姿态信息的三自由度弹道仿真模型能够比较准确、快速地计算近距格斗空空导弹的飞行弹道,适用于实时攻击区搜索等需要快速弹道解算的场合,而四元数的引入解决了近距格斗导弹各种大机动转弯飞行中可能存在的运动方程奇异问题。
[1]樊会涛,刘代军.红外近距格斗空空导弹发展展望[J].红外与激光工程,2005,34(5):564-568.
[2]袁子怀,钱杏芳.有控飞行力学与计算机仿真[M].北京:国防工业出版社,2001.
