坦克分队战术训练嵌入式仿真目标显示系统
2014-07-03宋艳生徐朝晖冯继东王青山
汪 兵,宋艳生,徐朝晖,冯继东,王青山
(中国人民解放军78098 部队,成都 611237)
装甲兵训练转型的迫切性、深刻性和创新性,战斗力生成模式的变革性,使传统的训练方式方法面临新的挑战。在传统的技战术训练中,战术目标一般以人工举牌示意或LED屏显示目标图形的方式显示,坦克乘员根据观察到的示意图作出相应的战术反应。这种静态的目标显示方式逼真度较差,脱离战场环境,显示与转换效率低下,与实战要求差距大。近年来,出现了一种新型的战术目标显示系统,采用复制分屏显示技术播放预先录制的战术场景视频,为参训人员提供战术目标显示。该显示方式基于实景拍摄和复制分屏技术,其缺点:一是分队中各车乘员观察到的场景相同,体现不出由于位置差异带来的视场差别,无法实现分队协同训练;二是缺乏交互性,乘员只能根据视频的内容被动应对。本文采用虚拟现实与视景仿真技术构建三维战场环境,将坦克分队置入虚拟场景中进行战术训练,通过三维建模技术在场景中生成各类战术目标,并使目标按照一定时序在不同地域实时加载、调整和退出。这种以视景仿真为手段的目标显示方法使参训人员浸入到“真实”的战场场景中,具有目标形象逼真、训练场景多变、训练针对性强、安全经济和可控性强等特点。
1 仿真目标建模
根据训练内容需求,分别建立武器装备及其他目标的实体模型,如坦克、飞机、指挥所、地堡、雷场等;根据装备车辆的不同特点,建立坦克运动学模型;根据坦克操控原理,建立坦克乘员控制模型;根据坦克防护系统原理,建立坦克毁伤模型;根据连排分队作战原理,建立战术协同训练模型等。
建模软件提供了一系列建模工具,其中包括模面(Face)、面变换(ModFace)、几何体(Geometry)、几何变换(ModGeom)等多个建模工具箱[1]。建模工具箱与文件格式转换工具、编辑器、视图管理器等组成了建模所需要的基本建模功能。这些基本建模功能主要提供交互式多边形建模及纹理应用工具,构造高逼真度、高度优化的实时三维(Realtime 3D)模型,并提供格式转换功能,能将常用CAD 或动画三维模型转换成OpenFlight 标准数据格式。
建模的步骤主要是:先根据所建模型的类型选用相应的工作模式(线、面、体等)和建模工具;再用多边形构建三维模型的几何体;然后添加纹理、贴图并进行调整优化;最后创建模型的细节层次(LOD)及渐变效果。图1 是某飞机的三维模型。

图1 某飞机的三维模型
2 战术训练场景构建
2.1 地形环境建模
地形的建模步骤与三位实体模型建模基本一致。首先根据仿真环境的实际需求、硬件和仿真软件的处理能力、多边形面的数量来规划该地形的创建标准。其次,收集相关的地形特征数据、纹理图片、需要添加的其他模型文件等。然后对纹理、地形特征数据进行必要的转换处理,整合、关联纹理、材质等数据,形成地形工程文件并存储为OpenFlight 格式,使之符合地形建模要求[2]。调用所需要的数字高程数据DED,创建仿真地形。对于较大面积地形,要分割出地形的精细部分和次要部分[3]。其中精细部分需要高精细的纹理贴图、密集的多边形面,次要部分的处理就相对简单纹理数据,较少的多边形面。最后,在地形上投影道路、桥梁、湖泊、城市等相关特征建筑,并测试地形模型的性能,定型该地形模型文件,完成整个地形模型的创建[4]。
为增加仿真场景的逼真度,采用的地形数据来源于某训练场地图,基于等高线及提取的其地物特征创建三维地形环境[5-6]。根据训练需要,系统还可以灵活更换其他地域的地形。
2.2 坦克分队的部署
设定坦克分队由3 辆某型坦克组成,在位置部署上呈战斗队形展开,横向和纵向依次保持一定间距,如图2 所示。

图2 坦克分队部署图
由于各坦克所处位置不同,其乘员的观察视角必然有别,对同一个目标的观察在时间上也会有先后差异。坦克乘员根据所观察到的战术目标场景采取适当的单车应对措施,并通过通信手段与友邻坦克协同联动。
2.3 视景驱动
视景驱动的目的,是把建立的静态视景模型根据仿真过程中动作对象的作用规律和联邦通信与数据处理提供的实时数据,利用视景仿真软件编程,以实现多种实体平台在一个共同的战场环境中进行虚拟作战演习、模拟战斗过程和战斗结果。
程序的主要工作流程构架由下列语句构成:

将地形地物模型、战术目标模型和坦克模型等导入Vega Prime 视景引擎中,按照战术目标的设置规范和作战要求,将各类地面战术目标依地形特点合理部署,地面和部分空中移动目标采用PathNavigator 定义移动路径[7-9],通过设置一系列WayPoint 的六维坐标(x,y,z,h,p,r)实现目标的自动飞行或自动行驶。对于飞机编队,选中其中一架飞机定义运动模式为MotionFly,编队中的其他成员采用MotionTetherFixed 模式伴飞。坦克分队自身以MotionDrive 运动模式在场景中自行运动或以交互控制方式运动,坦克乘员的视点Transform定义为跟随坦克运动。
地面移动目标碰撞检测采用的是BUMP 碰撞检测方法[10]。BUMP 是处理碰撞检测查询的类,它定义了一个Segment 类型的内部体,由6 条线段组成一个检测范围。这6 条线段在Isector 当前位置X、Y、Z 开始向局部坐标系3 个坐标轴的正负6 个方向延伸,检测范围由VGIS_BUMP_WIDTH、VGIS_BUMP_LENGTH、VGIS_BUMP_HEIGHT 这3 个属性控制。坦克与三角锥等目标的碰撞效果采用FxDebris 特效,坦克触碰地雷的效果采用FxExplosion 特效。爆炸、炮火袭击、化学袭击等烟雾效果均采用定粒子系统模拟[5,11,12]。
定义碰撞检测后,采用GroundClamp 位移策略,地面移动目标就会紧贴地表运动。
3 系统设计
系统利用虚拟现实技术和视景仿真技术,在主机上运行虚拟仿真程序,系统的程序架构如图3 所示。
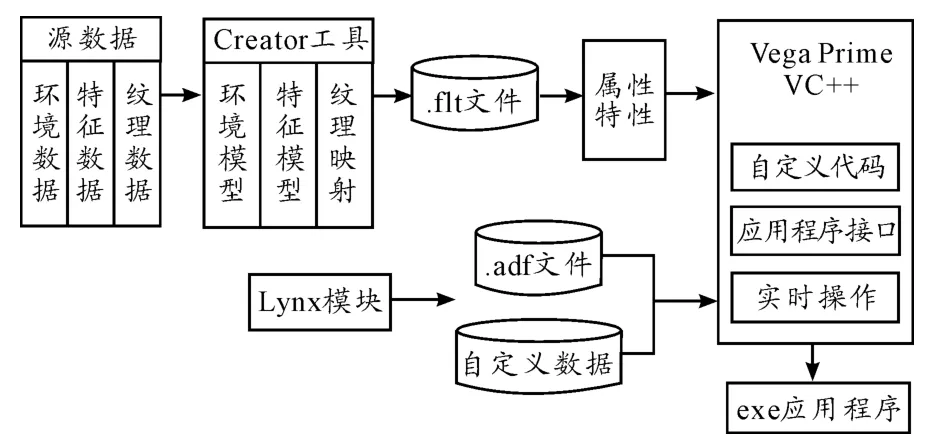
图3 系统程序架构
分队中的各单车所处位置不同,对同一目标的观察角度必然有别。采用多通道仿真技术,建立多个Transform,通过拓展分屏显示技术为各单车实时提供对应位置上观察到的场景。整个系统共设置四个视景窗口显示仿真结果,分为一个导控窗口和三个坦克视景窗口,如图4 所示。
导控视点设置为从空中俯视的视角,以方便对整个战场环境的观察和对坦克分队与战术目标的控制,如图5 所示。
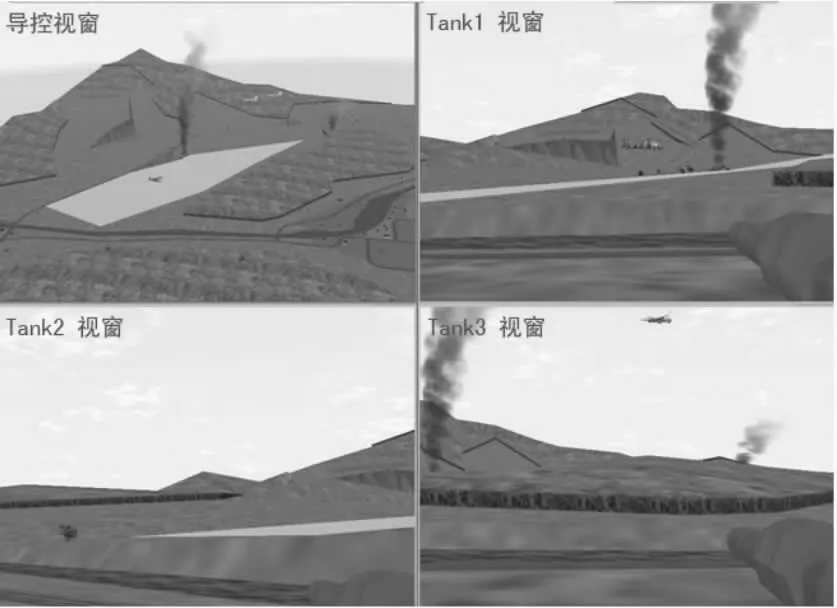
图4 系统多通道视窗

图5 战术目标显示导控视窗
在坦克潜望镜前加装小型LCD 显示屏,采用全屏模式显示来自中央主机的仿真视景。显示屏固定装置采用磁性表座设计,实现灵活拆装。坦克内部加装视景交互控制终端和声效播放器。系统的通信模块直接采用坦克自有电台。整个嵌入式设计不改变坦克原有结构,不影响坦克的操控功能,且拆装方便。
由于分队中各坦克观察视点与视角的差异,同一个战术目标在三个坦克窗口载入的时间先后不同,出现与调整的方位也不一样,需要各车乘员根据所观察到的战术目标以通信手段协同作出反应,体现出了贴近实战的要求。另外,系统还可根据训练需要模拟白天黑夜等天候和阴晴雨雪等气象条件,增加训练环境的可变性。
4 结束语
系统与坦克分队战术训练的课目设置相结合运用,战术目标的种类、载入时机、运动方式、训练时长等要素按照教范要求设计。训练中,能让参训者浸入到“真实”的战场场景中,具有目标形象逼真、训练场景多变、训练针对性强、安全经济和可控性强等特点。
[1]仇小鹏,杨平利,蒋阳.仿真建模利器― MultiGen Creator[J].计算机仿真,2007,24(5):279-282.
[2]陈璐,杨和梅,张仁友,等.坦克分队模拟训练虚拟战场环境动态生成[J]. 微计算机信息,2010,26(9):167-169.
[3]余海燕,孙建华,江炜.基于Creator 的大地形场景的仿真[J].系统仿真技术及其应用,2011,9(3):534-537.
[4]欧萍.基于MultiGen Creator 的地形建模技术研究[D].贵州大学,硕士,2007:2-9.
[5]冯晓辉,军敏.等高线生成DEM 以及三维地形建模的研究[J].计算机光盘软件与应用,2012(10):116-117.
[6]卢忠尉,郝颖明.基于Creator 大地景建模的研究与实现[J].微计算机信息,2010,26(2):139-141.
[7]朱思瑾,张永志,冷冕冕,等.激光制导武器作战的可视化仿真[J].四川兵工学报,2011,32(2):29-32.
[8]赵蔚,段红.基于Vega 的虚拟小镇漫游系统设计[J].计算机技术与发展,2012,22(4):199-203.
[9]崔世海,苏森煜,张晓东,等.基于Vega 的飞行仿真技术研究[J].战术导弹技术,2010(4):85-89.
[10]何树有.Vega 中碰撞检测的几种方法研究[J].软件导刊,2011,10(7):35-37.
[11]操军,孙宇锋,赵广燕,等. 导弹毁伤效果可视化仿真[J].火力与指挥控制,2012,37(3):142-146.
[12]王琪,邓会亨,马璐.基于粒子系统的海洋环境仿真[J].计算机系统应用,2013,22(2):230-233.
