基于MSP430的ROTAX914发动机监测系统设计
2014-07-03李伟,胡强,陈迪
李 伟,胡 强,陈 迪
(中国航天空气动力技术研究院,北京 100074)
ROTAX 系列航空发动机是由加拿大庞巴迪- ROTAX发动机制造公司制造,具有一流的性能和卓越的功重比,为全世界75% 以上的超轻型飞行器所选用。其中的ROTAX914 发动机是一款活塞式四冲程四缸发动机,广泛应用于“蚋蚊”、“捕食者”和“苍鹭”等无人机。针对ROTAX914设计的发动机监测控制系统也是应用于一款中空长航时无人机,该型监测系统包含1 个发动机监测单元(EMU)和6 组不同类型的传感器。该型监测系统能够对发动机的2 路缸温和2 路废气温度以及1 路滑油温度和1 路滑油压力进行监测,同时系统中的EMU 还需要与发动机的TCU 进行通讯,把解算下来的包括发动机转速、油门开度等参数传递给无人机的飞行控制计算机,帮助飞行控制计算机了解发动机运行状态以便控制无人机飞行。
1 系统原理
ROTAX914 发动机监测系统需要对发动机的缸温、废气温度、油压等进行测量,同时还要对发动机的转速、油门开度等信息进行收集以保证对发动机的运行状态有一个全面、准确及时的监视。为达到这些需求ROTAX914 发动机监测系统需要采用多种类型的传感器以适应发动机不同的需求,其中发动机的缸温和滑油温度最大不超过140℃,所以选择接触式的铂电阻传感器PT1000,废气温度最大不超过950℃,因此选择接触式的K 型热电偶传感器。滑油压力监测采用HoneyWell 压力传感器组件,监测范围0 ~10 bar。系统中的监测单元(EMU)通过采集这些传感器换算成相应的数值即可对发动机的温度和压力等进行监测,同时EMU 还要与发动机的TCU 进行通信,把发动机的其他参数如发动机转速、油门开度等信息解算出来并和监测到的温度、压力等参数一起发送给飞行控制计算机。发动机监测系统原理框图如图1所示。
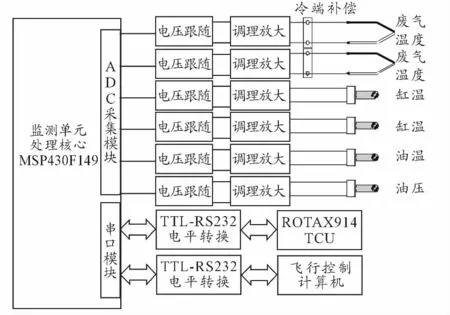
图1 发动机监测系统原理框图
2 监测系统设计与实现
2.1 硬件设计
由于ROTAX914 发动机的缸温和油温最大不超过140℃,因此选择铂电阻传感器PT1000 测量其温度参数。铂电阻传感器是利用金属铂(Pt)的电阻值随温度变化而变化的物理特性而制成的温度传感器。其测温精度高、性能稳定、易于连续测量、无需参比温度。对于中低温场合,它是一种很好的选择。现在常用的PT1000(R0=1 000 Ohm)是以温度系数TCR=0.003 851 为标准统一设计的铂电阻。其温度电阻特性在范围0 ~850℃时适应公式:

其中:Rt是温度为t 时的电阻(Ohm);R0是0℃时的标称电阻;α=3.908 3 ×10-3℃;β=-5.775 ×10-7℃。
从式(1)中可以看出铂电阻PT1000 的特性表达式为二次多项式,具有明显的非线性,由于ROTAX914 发动机的缸温温度变化范围相对较小,因此对铂电阻的非线性校正采用硬件拟合和软件校正相结合的方式。铂电阻PT1000 的信号调理电路主要包含非平衡电桥和差动放大器及相关电路。信号调理电路中加入正反馈电阻进行校正补偿。同时为了避免由铂电阻自身发热引起温度变化而产生测量误差,流经铂电阻的电流不应过大。放大器选择OP27,OP27 具有低失调电压和漂移特性与高速、低噪声特性。同时在调理放大电路后一级增加电压跟随器以提高输入负载,保证测量中电压电流不受负载的影响。滑油压力监测采用HoneyWell 压力传感器组件,输出信号为电阻阻值,其所测量压力与阻值对应关系与铂电阻传感器类似,因此采用类似的调理电路。铂电阻传感器调理电路和跟随器电路原理图如图2 所示。
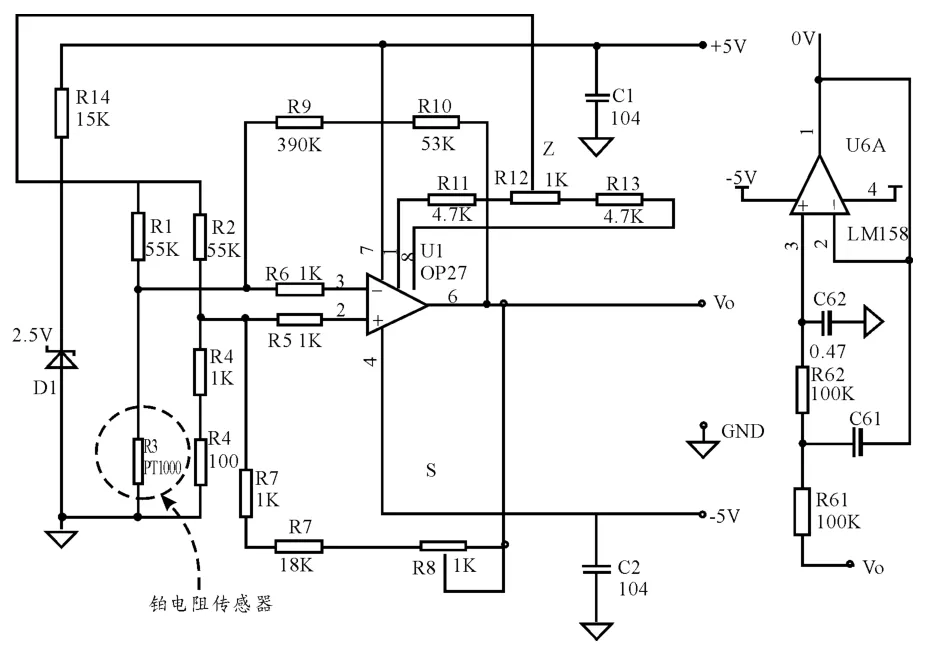
图2 铂电阻传感器调理电路和跟随器电路原理
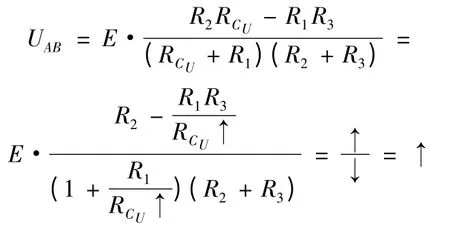
由于废气温度最高可达950℃,因此选择接触式的K 型热电偶传感器测量其温度参数。K 型热电偶是以镍铬合金为正极,镍硅合金为负极,两导体于一端焊接而成。这两根导体的焊接端称为K 型的热电极,其焊接端为热端,非焊接端为冷端。K 型热电偶可长期测量1 000 ℃的高温,其重复性好,产生的热电势大,可到0.041 mV/度。K 型热电偶传感器信号调理电路主要包括信号放大、冷端补偿和线性化等几部分。测量时传感器通过补偿导线使测量端远离发动机,同时采用冷端温度自动补偿法,即在调理电路的电桥中加入PT100 铂电阻。当环境温度t0升高时,电动势EAB(t,t0)会减小,但铂电阻PT100 阻值会增大,使得电桥输出电压UAB同样会增大,则EAB(t,t0)+UAB=常数。UAB计算公式:
同时在调理放大电路后一级同样增加电压跟随器以提高输入负载,保证测量中电压电流不受负载的影响。K 型热电偶传感器调理电路和自动补偿原理电路图如图3 所示。
系统中的监测单元(EMU)除了要采集发动机温度、压力等各种运行参数外,还需要与发动机涡轮增压控制单元(TCU)进行通信,通过TCU 解算出发动机的转速、油门开度等其他运行参数,并与采集到的信息进行整合一起发送给飞行控制计算机,以便飞行控制计算机对发动机的运行状态有一个全面的监视。EMU 中采用MSP430F149 作为处理核心,MSP430F149 芯片是美国TI 公司推出的超低功耗微处理器,是1 款16 位的单片机,具有独立16 位硬件乘法器,带有2 个串行通信模块以及一个12 位的A/D 转换模块ADC12。MSP430F149 的ADC12 为SAR 型12 位AD,共有16 路输入通道,其中8 路独立的外部输入通道,2 路接外部Vref +,Vref-,3 路内部通道可分别测内部温度传感器、AVCC、和外部参考源。MSP430F149 包含2 个独立的UART 串行通信模块,其电平为3.3 V 的TTL 电平,而TCU 和飞行控制计算机的串口通信为RS232 电平,因此需要增加串口电平转换电路。MSP430F149 的最小系统以及串口电平转换电路图如图4 所示。

图3 K 型热电偶传感器调理电路和自动补偿原理电路

图4 MSP430F149 的最小系统以及串口电平转换电路图
2.2 软件设计
EMU 的软件设计主要包含2 个部分:A/D 采集及解算部分;串行通信及解算部分。
对于A/D 采集部分,由于对传感器调理后的电压与监测的变量不是标准的线性关系,因此要想精确的测量需要采集并存储大量实验数据,可MSP430F149 内置的Flash 空间有限,同时查表过程会花费单片机大量时间,不利于实时的监测发动机状态,因此采用对采集到的数据进行曲线分段拟合。下面以滑油压力为例说明拟合的方法。滑油压力传感器测量的油压与电阻阻值变化以及调理后的电压关系如表1所示。
根据表1 可以看出滑油压力与调理后电压之间的关系曲线可以从3 段来拟合进行解算,从而在节省了存储空间及解算得时间的同时保证了一定的解算精度。滑油压力与调理后电压的拟合原理图如图5 所示。

表1 油压力传感器油压、电阻阻值、调理后电压关系
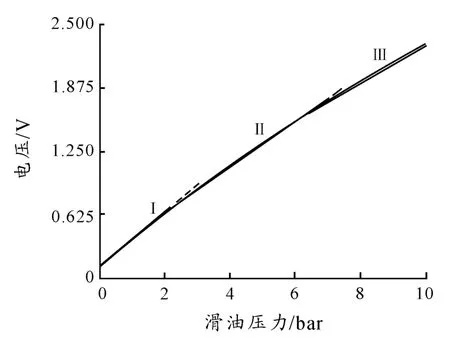
图5 滑油压力与调理后电压的拟合原理
对于串口通信与解算部分,TCU 与EMU 之间的通讯为查询、应答方式,即EMU 发送相关查询命令,TCU 予以回告,每次回告2 个发动机参数的相关数值。查询命令有10 种,具体查询命令与回告参数举例如表2 所示。

表2 查询命令与回告参数举例
3 结束语
本文基于MSP430F149 和多种传感器设计了一型针对ROTAX914 发动机的监测系统。该型监测系统通过实际需要进行了传感器的针对性选型,并针对这些传感器设计了相应的信号调理电路,同时通过大量测试对传感器进行了标定并对实验数据进行了曲线拟合。该型发动机监测系统能够及时准确的监测发动机的各项参数,为飞行控制计算机在飞行过程中对发动机有全面的了解提供了有力的保证,对ROTAX 系列发动机的监测系统设计有一定的借鉴作用。
[1]陈证石,秦红波,李铁鹰.基于MSP430F149 的串口服务器设计[J].电子技术应用,2009(1):95-97.
[2]李真,张玉兵,王伟.基于MSP430 水温加热控制系统[J].传感器世界,2012(4):21-23.
[3]徐忠良,赵青.基于MSP430 的双斜率测温方法[J].硅谷,2012(11):170,171,174..
[4]朱川邻,邵平凡.基于MSP430 的多点温度采集设计与实现[J].工业控制计算机,2012(8):118-119.
[5]严峥晖.基于MSP430 和CC2520 无线温湿度监测系统设计[J].电子世界,2012(10):117-118.
[6]宋凯云,朴家武,刘艳妮.基于K 型热电偶的模糊控制数字式温控仪[J].自动化与仪表,2007(6):27-29.
[7]李国强.一种新的铂电阻测温非线性校正电路[J].天津理工学院学报,1991(1):140-143.
[8]徐桂华.硅压阻式压力传感器的温度补偿[J].数据采集与处理,1994,9(3):229-232.
