壁虎爬墙壁的科学分析
2014-06-28赵兴华
赵兴华
(拱北中学 广东 珠海 519021)
童年的时候,常常惊讶于壁虎能在竖直的墙壁上疾步如飞,不会掉下来.所以在夏天的傍晚,我总喜欢用手捂住双耳,站在电灯附近的墙壁下,观看壁虎吃飞蛾的情景.壁虎通常趴在墙上,一动不动,等有飞蛾落在附近,便以迅雷不及掩耳之势把飞蛾咬在嘴里.如果有好事之徒用棍子去捅它,它会立即甩掉尾巴逃走,被甩掉的尾巴会像一条落地的泥鳅在地上活蹦乱跳地跳上好一阵子.听人说,这蹦跳着的尾巴一不留神就会跳进小孩子的耳朵眼里,然后就钻进了脑壳里,这孩子就成了傻子.因此,我每每站在墙边观察壁虎的时候总是用两只手紧紧地捂住耳朵,以防不测.壁虎这种奇妙的小动物在我心里留下了深刻印象.
不管是粗糙的墙面,还是光滑的镜面,壁虎都能像武林高手一样如履平地、独步天下(图1).为什么壁虎具有这样的神奇功夫呢?通常人们都认为壁虎的脚趾的形态像真空吸盘,因此就判断壁虎是利用大气压强爬上了墙壁.这不,就有中考物理试题涉及到了这个问题.

图1 攀援高手——壁虎
【题目】(2010年广安中考卷第13题)动物的生理结构是它适应自然、长期进化的结果,为它的生存起到了重要作用,下列实例用物理知识来解释不正确的是
A.啄木鸟嘴的尖喙能让它在啄木时对树木产生很大的压强,从而啄穿树木
B.壁虎脚掌上的吸盘,能利用大气压强把自己牢牢地粘在墙壁上
C.骆驼脚掌宽大可以增大它对地面的压强,方便在沙漠中行走
D.深海鱼到浅海后由于水压的减小所以不能成活
命题者提供的阅卷标准答案是 选项C,说明命题者也认为壁虎是利用大气压强爬上墙壁的.事实真的如此吗?
只要稍加分析就能判断这个观点是不靠谱的.吸盘要想利用大气压强吸住物体的表面,吸盘的边缘必须与物体的表面严丝合缝地紧贴在一起,以免漏气,因而吸盘只能吸住表面十分光滑的物体,无法吸住表面粗糙的物体.但壁虎无论是在粗糙的墙壁上还是光滑的玻璃板上均能轻松自如地行走,这就说明了壁虎不是利用大气压强爬上墙壁的.
1934年,有一个叫做沃尔夫·德利特(Wolf-Dietrich Dellit)的德国人就已经利用实验的方法推翻了这种说法.德利特把壁虎放在玻璃罩里,然后把玻璃罩里的空气抽走,结果壁虎仍然可以爬上竖直的玻璃——吸盘说被实验证明是错误的了.那壁虎到底依靠什么绝技能够爬上墙壁,甚至竖直的玻璃板的呢?
在比德利特的研究更早的1872年,就有人用显微镜观察,发现壁虎的脚趾板上布满了细小的刚毛,并且刚毛的末端似乎是弯曲的,于是人们想到了尼龙粘扣,提出壁虎的脚底板上长着末端弯曲的刚毛起到了与维可牢尼龙粘扣上的芒刺小钩相同作用的猜想.可问题是,维可牢尼龙胶带需要芒刺小钩和尼龙搭扣在一起相互配合才能发挥作用,但抛光的玻璃等光滑物体的表面并没有能供小钩子钩住类似尼龙搭扣的突起,壁虎却能够顺利攀爬,这说明“芒刺小钩”猜想也不符合事实.
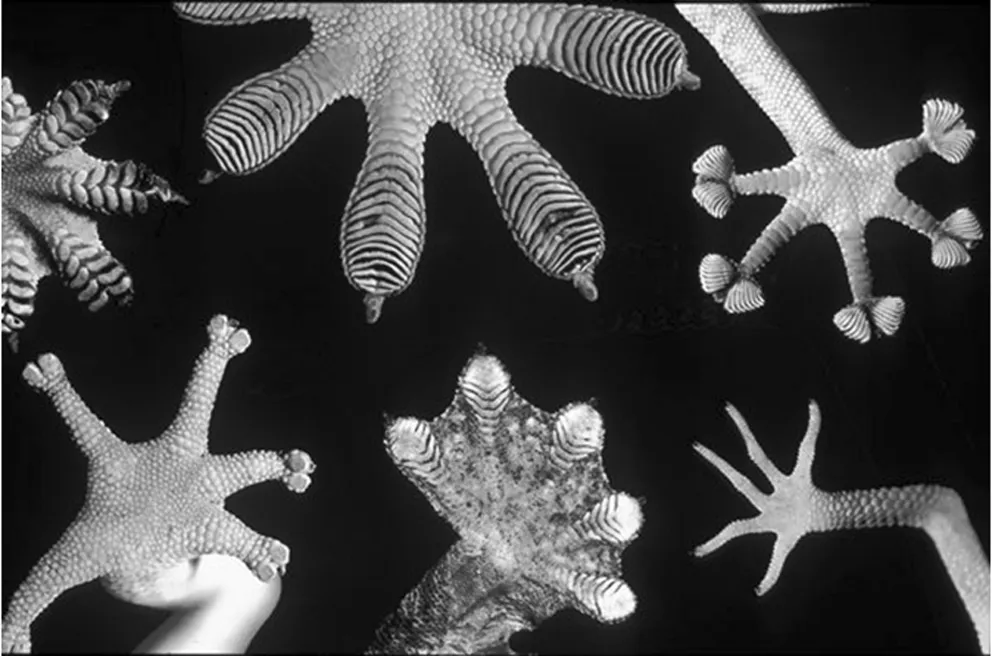
图2 形形色色的壁虎脚趾
由于成像原理的限制,光学显微镜极限分辨率只有0.3 μm左右,而壁虎刚毛的直径已经接近了这个分辨率极限.所以直到20世纪50年代,分辨率更高的电子显微镜的出现,人们才拥有了更适于研究壁虎神奇攀爬术的工具(图2).1965年,来自美国加州大学河滨分校的生物学家瑞宝(Rodolfo Ruibal)把壁虎的脚放在了电子显微镜下,他发现那些看似小钩子一样的刚毛末端,实际上是开叉的,每根刚毛都分成了100~1 000根更细的绒毛,这些绒毛极大的增加了壁虎脚掌的面积,特别是当壁虎攀在那些粗糙的物体表面时,这些绒毛更能填满那些细小的坑洼[1].这样,壁虎脚趾刚毛上的绒毛和物体表面就有很大的接触面积,而分子与分子之间存在着相互作用的吸引力,这种力叫做范德华力(亦称范德瓦尔斯力),虽然单对分子之间的范德华力是很小的,但如果相互作用的分子数量巨大,这些微小的力叠加起来后就很可观了.由此猜测,壁虎是靠脚趾刚毛上的绒毛分子和物体表面分子产生的范德华力而攀爬上墙壁的.
2000年,美国刘易斯克拉克大学的凯拉奥特姆(Kellar Autumn)小组和加州大学伯克利分校的罗伯特福(Robert Full)合作发表论文,详细描述了壁虎脚趾上刚毛的结构,计算出了壁虎脚趾和墙壁之间的“吸力”大小.他们在研究过程中选择的是我国南方和东南亚地区常见的蛤蚧作为研究对象.之所以选了它,是因为蛤蚧是世界上体型最大的壁虎,成年体长近40 cm,重近300 g——蛤蚧几乎是依靠范德华力飞檐走壁的最重的动物.经过测量,蛤蚧每个脚掌的面积大约是227 mm2,共长着3 268 800根刚毛,总共可以产生约20 N的吸附力,而它的重力只有大概3 N[2].也就是说,仅凭一只脚,壁虎也可以牢牢地吸附在天花板上.由此,关于壁虎脚底毛黏附机制的范德华力假说已得到学术界广泛的认同.
最近,南京航空航天大学仿生结构与材料防护研究所的研究人员对这个问题又有了新的研究进展,他们进一步研究了正常状态下、麻醉状态下以及离体壁虎脚底毛的形态和黏附性能的变化,研究结果表明,范德华力论是不全面的,壁虎脚底毛黏附机制中还存在着更为复杂的生物学效应[3].
显然,壁虎爬上墙壁的力学机制与大气压强的确没有丝毫的关系.也许,有人会疑问,花费这么多的精力研究壁虎爬墙的脚底毛黏附机制是否值得.研究清楚这个问题,具有很重要的仿生学意义,人们很早就在寻找仿造壁虎脚掌结构的材料,但如果按照错误的认识去仿生,研究的方向就出了错,那注定会失败.只有在正确的认知条件下,才可能成功.2008年,一位业余攀岩爱好者就使用了罗伯特福教授的仿生材料爬上了18 m高的楼顶.2012年,南京航空航天大学仿生结构与材料防护研究所在一位教授的领导下研发出了一种仿壁虎机器人,这款机器人的脚掌上附着了一层碳纳米管,几乎可以达到与壁虎脚掌刚毛一样的结构.除了壁虎脚掌特殊的结构使他善于攀爬以外,特殊的运动轨迹还能让他在吸附和脱附的过程中异常省力.但目前已经实现的仿壁虎机器人还无法做到像真正的壁虎那样运动自如,还需要进一步研究才能逐步完善[4].
参考文献
1 Rodolfo Ruibal, Valerie Ernst. The structure of the digital setae of lizards.Journal of Morphology. November. 1965,Volume 117, Issue 3, 271~293
2 Autumn, K., Liang, Y.A., Hsieh, S.T., Zesch, W., Chan,W-P.,Kenny, W.T., Fearing, R. and Full, R.J., Adhesive force of a single gecko foot-hair. Nature. 2000,Vol. 405, 681~685
3 郭策,孙久荣,戈应滨,等.壁虎脚底毛黏附机制的生物学效应.中国科学: 生命科学,2012,42: 135~142
4 李婵.《碟中谍 4》:人性需求与明日科技.北京科技报,2012-02-13(2)
