基于时变曲线模型的合成孔径声纳图像自动均衡方法研究
2014-06-27刘维江泽林刘纪元黄海宁
刘维,江泽林,刘纪元,黄海宁
(中国科学院声学研究所,北京 100190)
基于时变曲线模型的合成孔径声纳图像自动均衡方法研究
刘维,江泽林,刘纪元,黄海宁
(中国科学院声学研究所,北京 100190)
针对合成孔径声纳(SAS)图像不均衡问题,提出一种基于时变曲线模型的SAS图像自动均衡方法。以声传播模型、水底后向散射模型和SAS成像模型为基础,推导时变曲线(TVC)的表达式;结合SAS图像的统计特征,推导TVC观测量的计算方法;用非线性最小二乘拟合方法完成TVC估计;基于TVC进行了SAS图像的自动均衡。用湖试和海试数据对该方法进行了验证,结果表明推导的TVC表达式与试验数据具有较好的吻合度,提出的自动均衡方法可有效地消除SAS图像的不均衡问题。
信息处理技术;合成孔径声纳;图像均衡;时变曲线;威布尔分布
0 引言
受声传播损失、吸收损失、水底后向散射强度、声纳发射和接收系统引起的声源级波动等因素的影响,声纳图像强度(亮度)往往会有比较大的起伏。由于不同距离对应的虚拟孔径长度不同,合成孔径声纳(SAS)图像的强度变化范围会更大。声纳图像强度的不均衡问题对声纳图像的判读和处理造成很大的影响。一方面,由于图像输出设备(显示屏、打印机等)的动态范围有限,SAS图像强度不均衡可能会造成重要细节或目标丢失。另一方面,基于SAS图像的计算机辅助检测或分类(CAD/CAC)方法、目标自动检测和识别(ATD/ATR)方法大都依赖目标与背景之间的强度差异,不均衡的声纳图像会造成CAD/CAC和ATD/ATR方法失效[1-3]。因此,图像均衡是声纳图像处理中的一个关键步骤。
关于声纳图像均衡的方法主要包括直方图均衡化(HE)、局部直方图均衡化(LHE)、局部高斯均衡方法(LGM)等[4-6]。这些方法大都是根据图像局部统计特性对图像进行均衡,没有考虑声传播、后向散射和成像模型,因此应用于SAS图像时效果并不理想。为了解决这一问题,提出一种基于时变曲线模型的SAS图像自动均衡方法。在此方法中,综合考虑声传播模型、后向散射模型以及SAS图像统计模型,完成时变曲线(TVC)表达式的推导、TVC观测量的构造和参数估计以及SAS图像的自动均衡。
1 TVC模型
侧视SAS像系统中常采用航迹方向和垂直航迹方向构建成像坐标系。其中垂直航迹方向又称为距离向,距离向对应声传播方向。这里假定r方向为距离向,y方向为航迹方向,则SAS图像采用I(r, y)来表示。无论是声传播引起的声波能量衰减、后向散射引起的衰减以及合成孔径长度的变化引起的图像强度变化,均可以转换为距离的函数f(r).假定理想的SAS图像为I0(r,y),则实际获取的SAS图像为

在成像过程中,距离向一般转换为声传播时间进行处理,因此图像中与距离相关的函数f(r)常常称为TVC.在声信号采集过程中,一般会采用时变增益(TVG)来补偿f(r)带来的影响。由于f(r)实际上与所处水域、水底底质等诸多因素相关,在声信号采集过程中,f(r)很难准确估计,所以TVG的作用非常有限。
(1)式中f(r)以乘积的方式存在,而乘性噪声处理不如加性噪声方便,因此对(1)式取对数将乘积转化为求和操作,如(2)式所示。
lg[I(r,y)]=lg[I0(r,y)]+lg[f(r)].(2)
为了便于描述,后续说明中I、I0和f(r)均视为对数化以后的值。
f(r)与声传播距离、后向散射、合成孔径长度等因素相关,分别推导各因素的表达式,最终求和后即得到f(r)的表达式。
1.1 声传播模型
SAS成像中,声传播引起的衰减包括扩展损失和吸收损失[7],其表达式如(3)式所示。其中对数项表示扩展损失,线性项表示吸收损失,常数项表示测绘带近端对f1(r)的影响。

1.2 后向散射模型
假定声线与水底的夹角为θ,根据Lambert定律[8],水底的后向散射系数与θ的关系如下所示:

式中:c2为常数;b2为待求解系数。无论是拖曳式平台,还是自主航式平台,可以认为SAS基阵距水底的深度h是缓变的,而

则(4)式可以化简为对数项和常数项之和,如(6)式所示:

1.3 合成孔径长度模型
假定发射阵水平向开角为β,则合成孔径长度与距离呈正比,即

SAS系统无论是采用时域算法[9-11],还是采用频域算法[12],单像素点的强度均与合成孔径长度呈正比。如果考虑(2)式对数项的影响,则合成孔径长度引起的f(r)分量为

综合上述(3)式、(6)式和(8)式可以得到f(r)的表达式为

1.4 其他因素
在SAS成像中,除了1.1~1.3节的因素之外,还有两个值得注意的因素:一是水体;二是大掠射角的情况。下面分别进行说明。
1.4.1 水体
如图1所示,A为声纳基阵,B、C分别为声纳波束与水底交点的近端和远端。SAS工作在侧视模式下。在近距离处(小于AB之间距离),声纳波束内只包含水体(主要是体积混响)及悬浮的小目标(如鱼群等),此时回波强度较弱,一般远远小于水底的回波强度,因此需要对水体部分的图像进行特殊处理。采用线性项或常数项对其近似(这一近似的有效性可以从处理结果得到验证),即
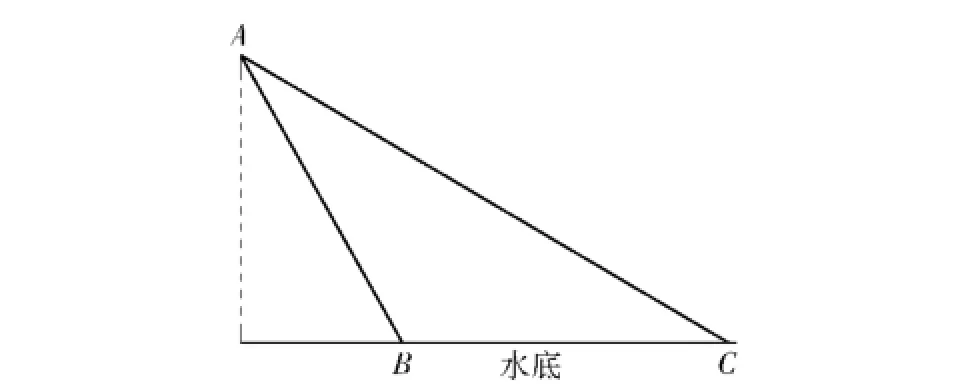
图1 垂直波束示意图Fig.1 Schematic diagram of vertical beam

1.4.2 大掠射角的情况
当距离大于AB时,声纳回波中开始包含水底回波分量。在声纳波束近端附近,掠射角较大;此时,水底回波强度有一个急速上升的过程。这一变化过程并不能采用(9)式进行描述。由于变化速度非常快,而且在峰值后下降,因此可以采用二次多项式进行描述,即

1.5 TVC表达式
综合上述分析,可以给出TVC的表达式:
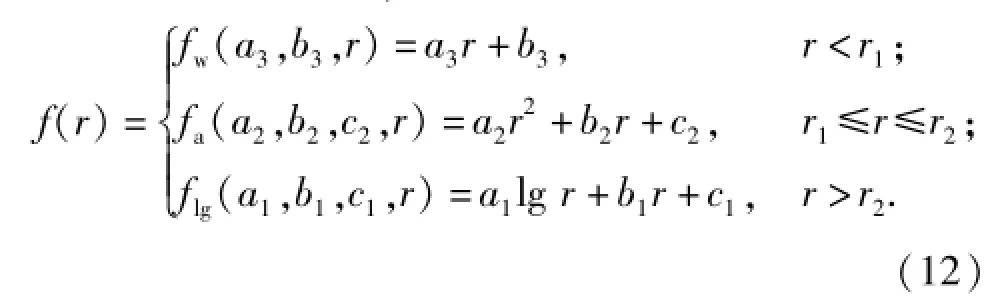
如1.1~1.4节所述,不同的距离上影响声纳回波强度的因素不同,故式中采用fw、fa和flg分别表示TVC.如图1所示,水体回波与水底回波的分界点为B.理想情况下,r1为线段AB的长度;实际情况下,影响r1和r2的因素很多,如声纳基阵姿态、水底地形、水深、声纳基阵垂直向开角、SAS基阵安装角等。
2 TVC估计方法
r1处TVC应当满足连续性条件:

为了保证声纳图像的连续性,式中fa与flg应当是连续变化的,故在r2处应当满足连续性和光滑性条件,如(14)式所示:
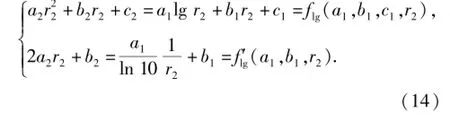
利用(13)式和(14)式,可以将f(r)的参数数量降低为7个,即a3、a2、a1、b1、c1、r1和r2.通过SAS图像得到时变曲线f(r)的观测量g(r),在此基础上利用非线性最小二乘拟合的方法[13]估计参数向量p,待估计量采用p*表示,则

(16)式可以采用置信区间(TS)法求解,其基本步骤如下:
1)在坐标点p的邻域s内采用函数q近似E(p,r);
2)限定s≤Δ,根据局部最小准则计算最佳步长s*;
3)如果

则接受p+s*作为新的坐标点,同时增大邻域范围Δ.否则,缩小邻域范围Δ;
4)重复执行上述步骤1~步骤3直至得到p*.
对于函数E(p,r),可以采用E(p,r)的二阶泰勒展开近似,即

式中:H为函数E(p,r)的二阶导数矩阵(Hessian矩阵);g为函数E在p处的梯度,且

计算步长s是TS方法的关键,根据步骤2的局部最小准则和(19)式,可得

(21)式可采用特征方程法求解(具体见文献[14])。
3 构造TVC的观测量
获取TVC测量最简单的方法即从SAS图像中沿距离方向取值。图2中给出一个沿距离方向直接获取的TVC观测量的实例,可以看出直接获取的TVC观测量噪声幅度非常大。图3给出了一幅SAS图像不同距离处像素值对应的概率密度曲线,可以看出不同距离的SAS图像像素值的分布形式差异较大。由图2和图3可知,沿距离方向直接获取TVC观测量的方法存在较大缺陷,会对参数向量p的鲁棒估计造成一定的困难。

图2 TVC观测量Fig.2 Measurement of TVC

图3 SAS图像像素值概率密度曲线Fig.3 Probability density curves of SAS image pixel values
为了获取最佳的TVC观测量,可以利用SAS图像的统计特征。根据(1)式、(2)式可知,同一距离上的SAS图像像素受f(r)的影响相同,因此可以认为其具有相同的分布。定义图像像素集合Ir和像素值vr(y)⊂Ir,


则根据Ir可以估计Weibull分布的参数λr和kr.
Weibull分布为非对称分布(如图3所示),因此众数是TVC最佳的观测量,即

可以根据λr和kr计算Weibull分布的众数,但估计这两个参数的计算量较大。由文献[15]可知, Weibull分布的众数和中值分别为
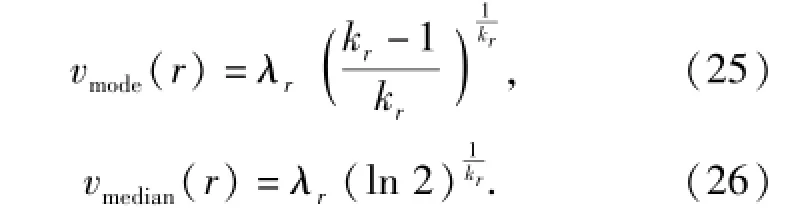
根据(1)式和(2)式可知,影响SAS图像像素值TVC的f(r)随距离变化,与航迹方向y无关。对于同一水下区域的声纳图像,形状参数kr沿距离方向的变化不大,而尺度参数λr沿距离方向的变化较大。因此,在实际应用中可以采用中值滤波代替众数估计。此时,
式中:由于形状参数kr变化不大,因此可以近似认为γr为常数。这一点可以从图4和图5中看出。图4和图5中给出了某一水底区域SAS图像像素值Weibull分布的形状参数kr和尺度参数λr随距离的变化。从图4和图5中可以看出,形状参数随距离变化不明显,而尺度参数随距离变化明显。
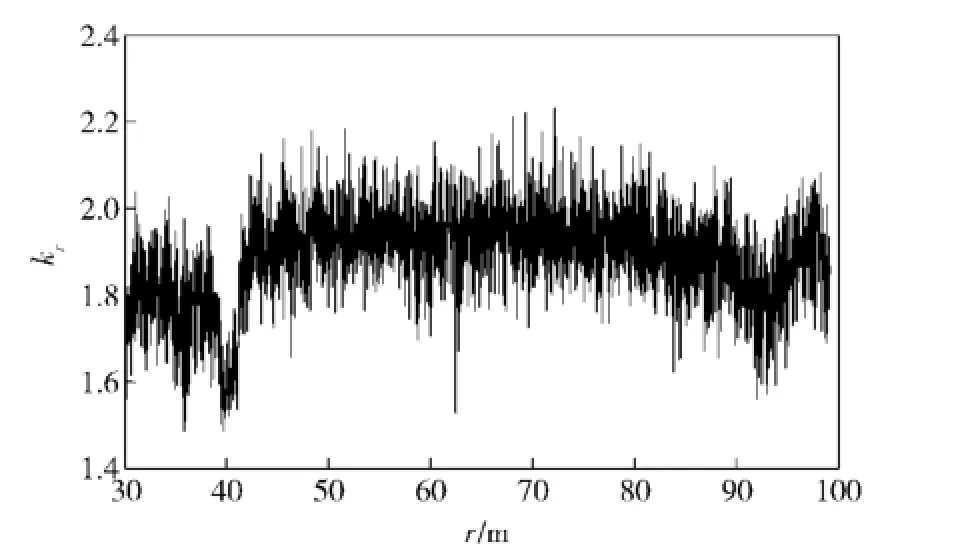
图4 形状参数krFig.4 Shape parameter kr
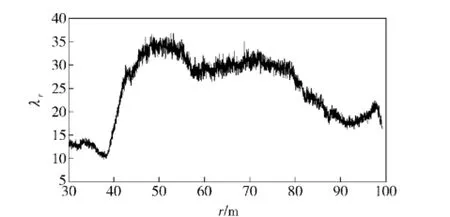
图5 尺度参数λrFig.5 Scale parameter λr
4 SAS图像均衡
利用(16)式、(24)式和(27)式可以得到TVC的f(r,p*),简记为f*(r).利用f*(r)通过(28)式完成SAS图像均衡,得到均衡后的图像I0(r,y).

由于不同底质对应的回波强度有差异,这种差异对于底质分类等应用有比较重要的参考作用。因此,为了保证回波强度信息不丢失,在应用(28)式时,增加了β参数。
由于人眼或计算机可表示的动态范围有限,因此经过(28)式处理后的图像I0(r,y)一般还需要经过对比度增强才能达到最佳的效果。调整的依据即Weibull分布的尺度参数λ.假定图像采用[0 1]之间的浮点数进行表示,用户期望目标相对背景的信噪比优于S,则预期的背景强度为

如果采用vmode表示I0(r,y)的众数,用于度量I0(r,y)背景的强度,图像增强变换为

根据(23)式和(25)式可知,(31)式完成的图像增强变换相当于改变图像分布的尺度参数λ.经过均衡处理以后,图像I0(r,y)在不同距离上的像素值对应的Weibull分布参数相近,即不同距离上图像像素的形状参数和尺度参数相近。因此,只需要调整分布的尺度参数即可以达到对比度增强的目的。
5 试验数据处理及分析
提出的SAS图像自动均衡方法在SAS图像显示系统中已经取得应用,应用的水域包括千岛湖、渤海、东海、南海和阿曼湾等,涉及多种类型的水底底质。下面选择3组典型的湖试和海试试验数据对提出的SAS图像自动均衡方法的有效性进行说明。其中第一组数据为湖上试验数据,对应湖底地貌成像和水体中鱼群的成像结果;第二组数据为湖上试验数据,对应严重不均衡的湖底地貌成像结果;第三组数据对应海上试验数据,对应海底地貌和海底管线成像结果。通过这3组湖试和海试试验数据,可以对提出的SAS图像自动均衡方法的有效性进行较全面的验证。
5.1 试验数据处理结果
在试验数据处理的结果中,给出了3类数据:一是均衡前和均衡后的SAS图像对比;二是TVC观测量与估计量曲线;三是均衡前和均衡后SAS图像中不同距离上像素值统计分布的概率密度曲线。
1)第一组试验数据处理结果,包括图6~图9.
2)第二组试验数据处理结果,包括图10~图12.

图6 SAS图像(横轴为距离向,纵轴为沿航迹方向;图像中黑色部分为水体,图像宽度147 m,长度281 m)Fig.6 SAS image(abscissa:range,ordinate:track.Black regions in SAS images are related with water reflection.The images width is 174 m,and the image length is 281 m)
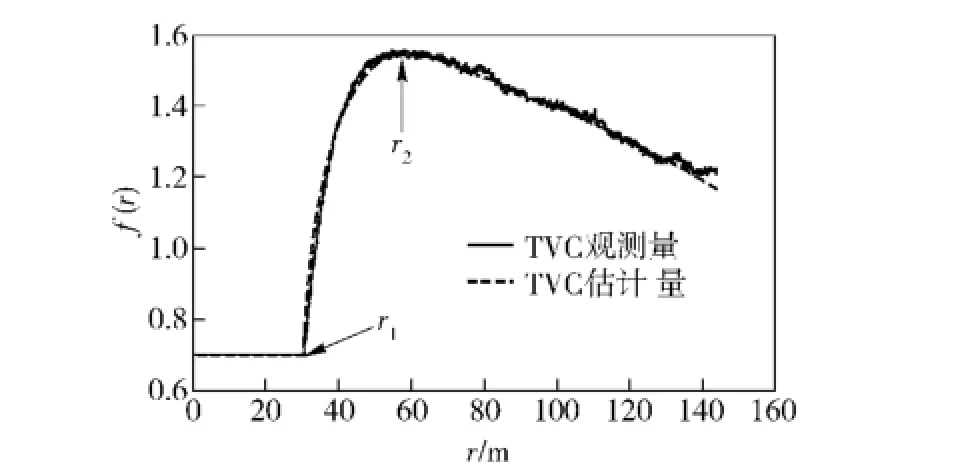
图7 TVC观测量和估计量Fig.7 Measurement and estimation of TVC
3)第三组试验数据的处理结果,包括图13~图15.

图8 图6中鱼群图像A放大Fig.8 Enlarged image A of fish school in Fig.6

图9 沿距离向图像像素值的分布Fig.9 Distribution of image pixel values in range direction
5.2 对试验数据处理结果的分析
在试验数据分析时,从三个方面对提出的SAS图像自动均衡方法的有效性进行检验,即:1)TVC观测量与估计量的吻合程度;2)不同距离图像像素值的统计分布;3)对SAS图像判读的影响。

图10 SAS图像(横轴为距离向,纵轴为沿航迹方向;图像中黑色部分为水体,图像宽度113 m,长度196 m)Fig.10 SAS image(abscissa:range,ordinate:track.Black regions in SAS images are related with water frelection.The image width is 113 m,and the image length is 196 m)
图11 TVC观测量和估计量Fig.11 Measurement and estimation of TVC
通过对照TVC估计量与观测量的吻合程度可以检验TVC模型的有效性和适用性。对照图7、图11和图14可以看出,TVC的估计量与TVC观测量的吻合程度都非常好。这说明,文中构造的TVC模型和提出的TVC表达式与试验结果吻合较好,且具有较强的适用性。在图14中,尽管有海底管线强干扰的存在,仍然可以得到TVC的估计量,这说明文中给出的TVC参数的估计方法具有较强鲁棒性。
图12 沿距离向图像像素值的分布Fig.12 Distribution of image pixel values in range direction
从物理上看,对于同一成像区域,如果底质类型大致相同,其SAS图像像素值的分布应当趋于一致。通过均衡处理,消除声传播、后向散射、发射和接收电子系统引起的不均衡现象,对声图判读和后续处理是非常有益的。对照图9、图12和图15可以看出,在均衡前SAS图像像素值的分布随距离的变化剧烈波动;而均衡后SAS图像像素值的分布趋于一致。
均衡对于SAS图像判读的影响在图6、图10和图13中表现形式有所差异。在图6中,均衡后的图像可以清晰看到水体中目标强度比较弱的悬浮目标(鱼群等,图8为图6中部分SAS图像的局部放大)。图10中,受水下地势的影响,SAS图像中距离较远的部分回波较弱;通过均衡处理,使原本较暗的区域变得清晰可读;图10中,由于SAS图像中近距离和远距离上底质存在较大差异,所以均衡后近距离和远距离图像像素值的分布仍然存在一定的不同。图13中,由于水下管线的目标强度较高,再加上SAS图像固有的不均衡问题,使SAS图像中除管线之外的大部分细节被压制,非常不利于图像判读(见图13(a));通过均衡处理,有效地消除了这一问题,使管线附近的作业痕迹清晰地显现出来。
综合上述分析,可以看出文中推导的TVC模型合理,TVC表达式与试验结果有较好的吻合度,提出的自动均衡方法有效地消除了SAS图像中存在的不均衡现象,为SAS图像判读和后续处理打下了良好的基础。
图13 SAS图像(横轴为距离向,纵轴为沿航迹方向;SAS图像中黑色部分为水体,图像宽度188 m,长度389 m)Fig.13 SAS image(abscissa:range,ordinate:track.Black regions in SAS images are related with water reflection.The image width is 188 m,and the image length is 389 m)

图14 TVC观测量和估计量Fig.14 Measurement and estimation of TVC

图15 沿距离向图像像素值的分布Fig.15 Distribution of image pixel values in range direction
6 结论
密切结合物理模型,提出一种SAS图像自动均衡方法,并在实际应用中具有良好的效果。此方法的关键有两点:一是合理的TVC模型。通过湖试和海试数据的处理和分析,证明了推导的TVC表达式的合理性;二是TVC的观测量和估计量的计算。结合SAS图像统计特征,通过理论分析,表明可以采用Weibull分布的众数作为TVC观测量。利用非线性最小二乘拟合方法实现了TVC的鲁棒估计。
该方法可以应用于SAS图像后处理和实时处理。在实时处理环境中,声纳图像随声纳基阵的移动连续输出,在这种情况下,可以通过沿航迹方向加窗的方式实现声纳图像的实时自动均衡。
References)
[1] Coiras E,Myers V,Evans B.Reliable seabed characterization for MCM operations[C]∥OCEANS 2007.Vancouver,BC:IEEE, 2007:1-5.
[2] Fandos R,Zoubir A M.Optimal feature set for automatic detection and classification of underwater objects in SAS images[J].Selected Topics in Signal Processing,2011,5(3):454-468.
[3] Maussang F,Chanussot J,Hetet A.Mean-standard deviation representation of sonar images for echo detection:application to SAS images[J].Oceanic Engineering,2007,32(4):956-970.
[4] Dobeck G J.Image normalization using the serpentine forwardbackward filter:application to high-resolution sonar imagery and its impact on mine detection and classification[C]∥Defense and Security.Orlando,Florida,US:International Society for Optics and Photonics,2005:381-391.
[5] Capus C G,Banks A C,Coiras E,et al.Data correction for visualisation and classification of sidescan SONAR imagery[J].IET Radar,Sonar&Navigation,2008,2(3):155-169.
[6] Isaacs J C,Tucker J D.Signal diffusion features for automatic target recognition in synthetic aperture sonar[C]∥Digital Signal Processing Workshop and IEEE Signal Processing Education Workshop(DSP/SPE).Sedona,AZ:IEEE,2011:461-465.
[7] 李启虎.数字式声纳设计原理.[M]合肥:安徽教育出版社, 2002:164-167.
LI Qi-hu.Principle of digital sonar design[M].Hefei:Anhui Educational Publishing House,2002:164-167.(in Chinese)
[8] 北大西洋公约组织水下研究中心,美国PSI公司.海洋水声环境和声纳设计手册[M].北京:海潮出版社,2010:129.
NATO Underwater Research Center,US PSI Corporation.Ocean acoustic environment and sonar design manual[M].Beijing:Haichao Press,2010:129.(in Chinese)
[9] 刘维.多子阵SAS三维模型仿真与数据处理算法研究[D].北京:中国科学院声学研究所,2008:45-60.
LIU Wei.Research on multiple-receiver SAS three dimensional model simulation and data processing algorithms[D].Beijing:Institute of Acoustics,Chinese Academy of Sciences,2008:45-60. (in Chinese)
[10] 刘维,张春华,刘纪元.FFBP算法在合成孔径声纳成像中的应用[J].声学技术,2009,28(5):572-576.
LIU Wei,ZHANG Chun-hua,LIU Ji-yuan.Application of FFBP algorithm to synthetic aperture sonar imaging[J].Acoustical Technology,2009,28(5):572-576.(in Chinese)
[11] Ferguson B G,Wyber R J.Generalized framework for real aperture,synthetic aperture,and tomographic sonar imaging[J].O-ceanic Engineering,2009,34(3):225-238.
[12] 刘维,刘纪元,张春华.多子阵合成孔径声呐波数域算法不均匀采样问题研究[J].声学学报,2009,34(3):203-210.
LIU Wei,LIU Ji-yuan,ZHANG Chun-hua.Research on non-uniform sampling problem when adapting wave number algorithm to multiple-receiver synthetic aperture sonar[J].Acta Acustica, 2009,34(3):203-210.(in Chinese)
[13] Madsen K,Nielsen H B,Tingleff O.Methods for non-linear least squares problems[M].2nd ed.Copenhagen:University of Denmark,2004:17-50.
[14] Com A R,Gould N I M,Toint P L.Trust region methods[M]. Philadelphia:SIAM,2010:115-168.
[15] Pham Hoang.Springer handbook of engineering statistics[M]. New York:Springer,2006:64-72.
A Time-variant Curve Model-based Automatic Equalization Method for Synthetic Aperture Sonar Images
LIU Wei,JIANG Ze-lin,LIU Ji-yuan,HUANG Hai-ning
(Institute of Acoustics,Chinese Academy of Sciences,Beijing 100190,China)
A time-variant curve(TVC)model-based automatic equalization method is proposed for the intensity variation problem of synthetic aperture sonar(SAS)images.A theoretical expression of TVC is deduced based on sound transmission model,underwater backscattering strength model and SAS image model.A method to calculate the TVC observations is established based on the statistical model of SAS images.An estimation method based on non-linear least square fitting model(NL-LSFM)is used to acquire the optimized parameter of TVC.At last,the SAS images are automatically equalized and enhanced based on the optimized TVC.The method proposed has been validated by lake and sea trials.The test results show that the result calculated by the TVC expression is consistent with the experimental data,and the automatic equalization method can remove the intensity variation of SAS images properly.
information processing;synthetic aperture sonar;image equalization;time-variant curve; Weibull distribution
TB566
:A
1000-1093(2014)03-0347-08
10.3969/j.issn.1000-1093.2014.03.009
2013-04-08
国家自然科学基金项目(11204343);哈尔滨工程大学水下机器人技术重点实验室基金项目(9140C27020112022601)
刘维(1980—),男,副研究员,博士。E-mail:liuwei@mail.ioa.ac.cn;江泽林(1985—),男,博士研究生。E-mail:jiangzelin1985@126.com
