空气升力对被动式半捷联平台稳定性影响分析
2014-06-27段晓敏李杰刘俊
段晓敏,李杰,刘俊
(中北大学仪器科学与动态测试教育部重点实验室,山西太原 030051)
空气升力对被动式半捷联平台稳定性影响分析
段晓敏,李杰,刘俊
(中北大学仪器科学与动态测试教育部重点实验室,山西太原 030051)
安装在高速滚转的常规炮弹上的被动式半捷联平台是基于重力作用下的复摆运动原理工作的装置。由于弹体在飞行时受到空气升力的作用,所以空气升力的变化会导致弹体在竖直方向上的加速度变化,而弹体在竖直方向的加速度变化会导致被动式半捷联平台的等效复摆回复力矩发生变化并影响平台的稳定性。为了研究空气升力对被动式半捷联平台稳定性的影响,对弹体和弹体内的被动式半捷联平台内筒进行了力学分析,建立了空气升力作用下的平台内筒的运动微分方程。通过对运动微分方程进行计算仿真,得到了不同空气升力作用时被动式半捷联平台内筒的滚转角度曲线和角速率曲线,并得到了平台保持稳定时空气升力所需满足的范围。仿真结果表明,弹体受到的空气升力越大,被动式半捷联平台的稳定性越高。当空气升力小于0.005 75 mpg (mp为弹体质量,g为重力加速度)时,被动式半捷联平台将失去稳定作用。在三轴高速转台上进行空气升力和重力相等时的被动式半捷联平台内筒运动状态的地面实验,实验结果验证了仿真结果的正确性。
兵器科学与技术;惯性导航;常规炮弹;空气升力;半捷联平台
0 引言
精确测量常规炮弹飞行时的导航信息参数有助于实现对常规炮弹的制导化改造。惯性测量系统不受外界干扰,而且能够同时提供姿态、速度和位置信息,因此研究惯性测量系统在炮弹上的应用具有重要的工程意义[1-3]。由微机电(MEMS)惯性传感器组成的微惯性测量系统(MIMU)具有体积较小和抗过载性能良好的特点,这种系统可以较好地满足常规炮弹惯性测量系统对体积和抗过载性能的要求[4]。然而,大部分常规炮弹在飞行时会保持着较高的滚转角速率,而现有的捷联式惯性测量系统无法在弹体高转速环境下实现足够的测量精度[5]。传统的平台式惯性测量系统虽然不会被弹体的高速滚转所影响,但其体积较大、抗过载性能差、成本高,也无法在口径较小、发射过载较大、成本较低的制导炮弹中发挥作用[6]。
为了解决惯性测量系统在小口径、低成本、高过载以及高滚转速度的常规炮弹应用中所遇到的问题,一种被动式半捷联单轴稳定平台得到了研究[6-7]。这种被动式半捷联单轴稳定平台利用机械装置实现了MIMU与弹体在滚转轴的隔离,该平台在基于重力作用下的复摆运动原理下工作。由于空气升力的变化会使得弹体在竖直方向上的加速度产生变化,而弹体在竖直方向的加速度变化会引起被动式半捷联平台内部等效复摆回复力矩的变化从而影响平台的稳定性,因此有必要研究空气升力对被动式半捷联平台的作用影响机理。
目前针对制导炮弹导航技术方面的研究文献中,大多数集中在全球定位系统(GPS)/惯性导航系统(INS)组合导航技术在滚转速度较低的制导炮弹上的应用研究[8-12]。GPS/INS应用最成功的制导武器范例是由波音公司为美国海空军开发的联合直接攻击弹药(JDAM).JDAM的INS使用了Honeywell公司的商用IMU-HG1700,其中包括3个激光陀螺,GPS与INS采用紧组合方式,其设计组合导航精度为圆概率误差13 m[10].2006年Honeywell和Rockwell公司开发的MEMS INS/GPS超紧组合导航和制导系统,其抗冲击能力20 000 g,定位精度5 m,体积14 in3,抗干扰性能达到89 dB[11].国内清华大学的尚捷博士对MIMU及其与GPS的组合系统设计与实验方法作了研究,设计了一种基于虚拟噪声的静基座捷联系统现场最优标定方法,完成了弹射实验用模拟弹设计,并利用模拟弹内部的微型惯性运动参数测量系统,做了测量导弹弹射时三维运动参数的试验[12]。GPS/INS组合导航系统在很多制导炮弹中得到了成功应用,但目前GPS/INS所采用的捷联式方案仍然只适用于滚转速度较小的弹种[6]。
目前可以应用于高速滚转的大过载炮弹中的制导方式有捷联式无陀螺INS、地磁导航系统以及这两种系统的组合[13]。这些系统的优点是具有很强的抗过载性能,但其缺点是测量精度较差,此外地磁导航系统还容易受到来自外界环境的干扰。另外,可以应用于发射过载较小的火箭弹上的惯性导航方案的有由伺服电机提供的稳定平台方案[14]。这种方案由于伺服电机的引入而无法承受较大的过载,所以无法应用于发射过载较大的炮弹上。
本文在介绍一种结构独特的被动式半捷联单轴稳定平台的基础上,重点研究了空气升力对该平台稳定性的作用影响。被动式半捷联平台依据复摆在重力作用下的运动原理设计完成,采用了质量偏心的结构设计使平台的内筒得到保持稳定的回复力矩,从而实现平台内部与弹体滚转轴的相互隔离。这种被动式半捷联单轴稳定平台既能够消除弹体滚转对MIMU的不利影响,同时又满足体积和抗过载性能的要求。本文主要内容包括:介绍了被动式半捷联平台的组成及工作原理;对弹体及安装在其内部的被动式半捷联单轴稳定平台内筒进行了受力分析,建立了弹体在空气升力作用下平台内筒的运动微分方程;通过对运动微分方程的计算仿真研究了空气升力对被动式半捷联平台稳定性的影响;在三轴高速转台上进行了弹体受到的空气升力等于其自身重力时被动式半捷联平台内筒运动状态的地面半实物仿真实验。
1 平台组成及工作原理
被动式半捷联单轴稳定平台的设计利用了重力作用下的复摆运动原理,其组成及工作原理如图1所示:弹体高速滚转,安装在弹体内部的被动式半捷联单轴稳定平台内部由两个深沟球轴承支撑起一个内筒,内筒内部用来安装惯性测量单元、解算电路板、电池和质量块。其中质量块由金属铅或其他高密度金属材料加工而成,并安装在内筒底部,起降低内筒质心位置的作用。平台靠近弹尾一端还设计有炮弹发射时保护轴承免受破坏的过载承载装置,其在炮弹发射瞬间承受内筒受到的向后的冲击力。弹体在空中高速滚转时,平台内筒部分利用质量块由于重力产生的回复力矩使得MIMU在滚转轴保持稳定。
图1 被动式半捷联单轴稳定平台示意图Fig.1 Schematic diagram of passive partial strapdown platform
这里只对被动式半捷联平台的组成及工作原理做了简要介绍,有关被动式半捷联平台详细的工作原理内容可参考文献[6].
2 平台的动力学模型
建立被动式半捷联单轴稳定平台的动力学模型需要先根据受力情况建立平台的力学模型,然后再根据平台的力学模型运用力学原理建立系统的运动微分方程。
2.1 平台内筒的力学模型建立
弹体在空中飞行时除了受到空气升力作用外还受到重力和空气阻力的作用,具有助推发动机的弹体还会受到推力的作用。假设弹体射程较短,则重力大小恒定且方向竖直向下。假设攻角很小,则空气升力垂直于弹轴方向向上。弹体受到的重力和升力的合力决定了弹体在竖直方向的加速度av(t)的大小和方向。
弹体在飞行时的受力情况和运动状态决定了安装在其内部的被动式半捷联单轴稳定平台内筒的受力情况。在弹体飞行过程中,被动式半捷联平台内筒会受到摩擦力、重力、径向支撑力和轴向支撑力的作用,具体情况如图2所示。其中平台内筒受到的摩擦力是由滚转的弹体与平台内筒之间的轴承滚动产生的。
图2 飞行时炮弹和平台内筒的受力示意图Fig.2 Force conditions of the flying projectile and the inner cylinder of platform
为了建立被动式半捷联单轴稳定平台的运动微分方程,对图2中平台内筒的受力模型进行简化,得到图3中的简化力学模型。在图3中,半捷联式平台内筒被简化成一个复摆,复摆的质量为m,等效摆长为l,摆动角度为θ(t)、转动惯量为I0.摆受到重力mg、支撑力Fs和摩擦力矩Mf的作用,整个复摆系统在竖直方向的加速度为av(t).有关更详细的平台力学分析内容可以参照文献[6].
2.2 平台内筒的运动微分方程建立
基于图3所示的被动式半捷联单轴稳定平台内筒简化的力学模型可以建立内筒关于其转动角度θ(t)的动力学方程。由文献[6]中的研究可知,被
图3 简化的力学模型Fig.3 Mechanical model


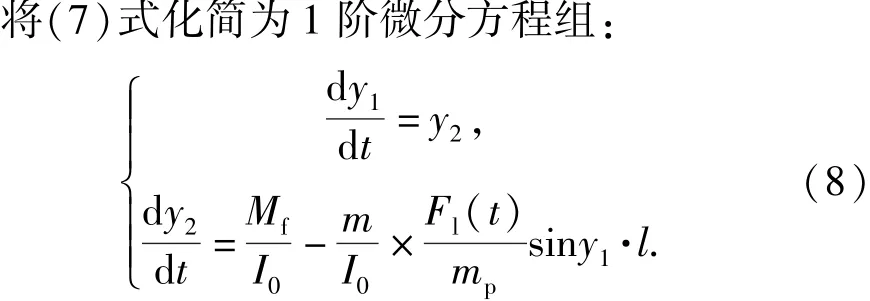
(7)式为升力作用下的弹体在水平飞行时被动式半捷联式单轴稳定平台的运动微分方程。
3 空气升力对平台稳定性影响的计算仿真
空气升力作用下的被动式半捷联单轴稳定平台的运动微分方程(7)式为2阶齐次非线性常微分方程,可以利用数值积分方法来对其进行求解,得到升力Fl(t)不同取值下θ(t)和(t)的值。首先在(7)式中引入辅助变量:y1=θ(t),y2=
对于飞行中的弹体来说,当升力Fl(t)=0时,弹体处于完全失重状态,而当Fl(t)=mpg时弹体所受到的升力与重力相等。本文讨论升力Fl(t)在0~mpg之间变化时平台内筒的滚转角度θ(t)和角速率(t)的变化规律。首先将升力Fl(t)的值分别假设为0、mpg的0.001倍、mpg的0.01倍、mpg的0.1倍、mpg的0.5倍和等于mpg,分别计算求解不同取值时方程组(8)式的解。
其中求解方程组所需的轴承摩擦力矩Mf的值与升力Fl(t)有关,升力的变化导致轴承的载荷变化,从而改变Mf的大小。升力越大,轴承的载荷越大,Mf也就越大。具体的摩擦力矩Mf值由轴承摩擦力矩公式计算得出[6],其计算结果与Fl(t)的对应关系如表1所示。
仿真计算所需要的其他参数均采用某被动式半捷联单轴稳定平台实验样机的实际参数,具体如表2所示。

表2 被动式半捷联单轴稳定平台参数Tab.2 Parameters of passive partial strapdown platform
根据表1和表2中的参数,在Matlab中使用4阶龙格-库塔法对方程组(8)式进行求解。最终得到了不同升力下被动式半捷联单轴稳定平台内筒的滚转轴角速率(t)和角度θ(t)的时间曲线图。图4(a)~图4(f)依次为假设弹体所受升力Fl(t)分别等于0、0.001mpg、0.01mpg、0.1mpg、0.5mpg和mpg时被动式半捷联单轴稳定平台内筒的滚转角速率和角度θ(t)的时间曲线图。
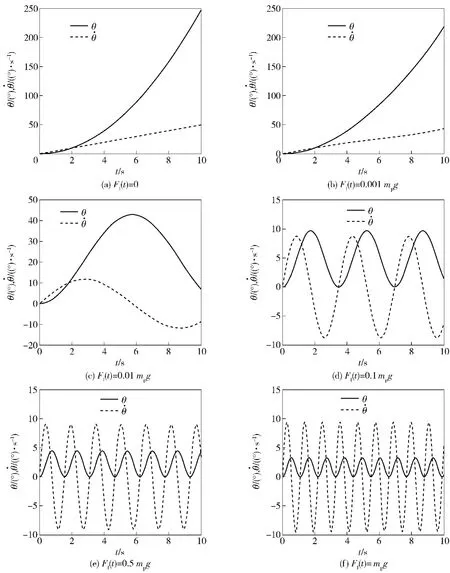
图4 仿真曲线图Fig.4 Simulation results
从图4(a)和4(b)中可以看出,当弹体所受空气升力Fl(t)等于或接近等于0,即弹体处于或接近失重状态时,平台内筒的滚转角速率(t)和角度θ(t)随着时间的增加不断增加,说明平台这种情况下无法起到稳定作用。而当弹体所受升力Fl(t)继续增加时,如图4(c)~图4(f)显示,平台内筒滚转角速率(t)和角度θ(t)曲线变为周期性振动曲线,内筒在这种条件下会做复摆摆动运动,说明在这种情况下平台可以实现稳定的作用。从图4(c)~图4(f)中还可以进一步看出,随着升力Fl(t)的逐渐增大,角速率(t)和角度θ(t)曲线的振动频率也逐渐增大。另外,随着Fl(t)的增大,角度θ(t)的幅值逐渐减小,证明平台的稳定性逐渐增强。
另外,从图4的仿真结果可以看出,平台内筒处于稳定与旋转的临界状态时Fl(t)的值位于0.001mpg和0.01mpg之间,为了进一步得到临界状态时Fl(t)的精确值,对Fl(t)等于0.001mpg和0.01mpg之间进行取值并仿真比较,通过仿真发现Fl(t)在等于0.005 75mpg时平台内筒为旋转状态,而在等于0.005 76mpg时变为稳定摆动状态。具体仿真结果如图5(a)和图5(b)所示。
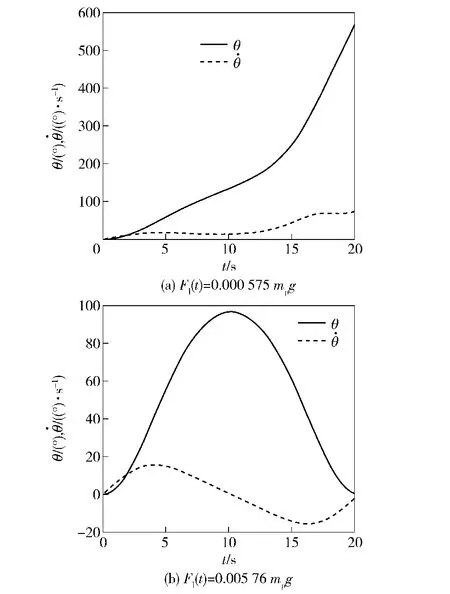
图5 临界状态仿真曲线图Fig.5 Simulation results of critical state
从图4(a)~图4(f)和图5(a)、图5(b)的曲线图可以得出的结论是,当弹体受到的空气升力Fl(t)的大小在0.005 75mpg以下时,被动式半捷联单轴稳定平台无法实现稳定的功能。当升力Fl(t)的值在0.005 76mpg以上时,被动式半捷联单轴稳定平台就可以实现稳定功能,并且空气升力Fl(t)越大,被动式半捷联单轴稳定平台越稳定。由于常规炮弹都在近地飞行,其飞行过程中所受升力都远大于0.000 576mpg,因此常规炮弹可以满足被动式半捷联平台稳定对空气升力大小的要求。而类似弹道导弹等需要飞出大气层的飞行体会在一定飞行时间内处于失重状态,则无法满足被动式半捷联平台的使用条件。
4 Fl(t)=mpg时的地面半实物仿真实验
由于地面实验条件限制,无法实现对所有不同升力下的计算仿真结果进行地面实验的验证。所以仅对Fl(t)=mpg时的状态在地面上进行了半实物仿真实验。具体实验情况如图6所示,使用三轴高速转台模拟高速滚转的弹体,将被动式半捷联单轴稳定平台固定在转台内框,设置转台俯仰角为0°,内框以18 r/s高速转动。实验过程中由安装在平台内筒内部的MEMS角速率陀螺测量得到平台内筒的滚转角速率,并对角速率进行积分得到滚转角度。

图6 高速转台实验Fig.6 Experiment on the high-speed turntable
实验得到如图7所示的平台内筒滚转角速率和角度曲线。将图7与图4(f)中的计算仿真曲线图对比可以看出,图7中的角速率曲线的峰值在开始阶段有一定浮动,随后到达较为稳定的状态,其原因主要是由于实验中转台的工作状态有两个阶段:启动加速阶段和正常匀速运转阶段。转台在启动阶段其内框转动角速率实现从0~18 r/s的加速,这会造成轴承的摩擦力矩产生一定的浮动变化。当转台从启动阶段进入正常运转阶段后,轴承摩擦力矩也进入稳定状态。在总体上图7中的测试曲线与图4(f)中的计算仿真曲线相符,可以验证计算仿真结果和动力学模型的正确性。
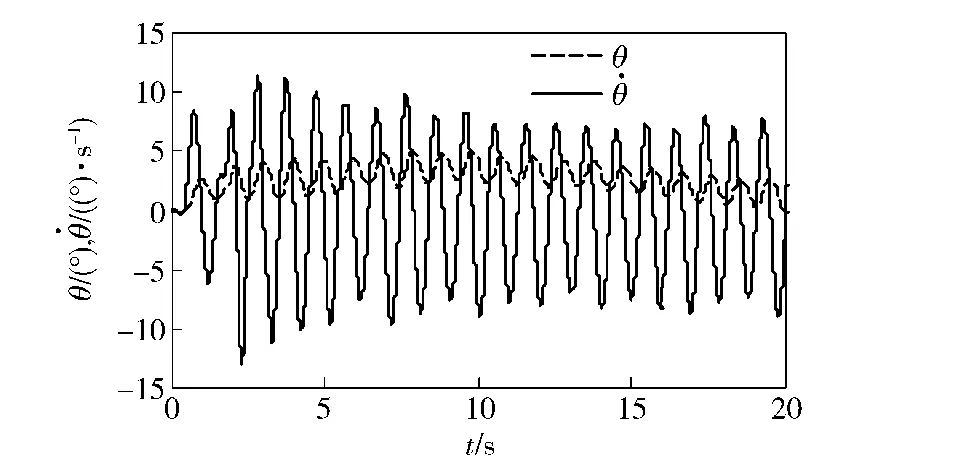
图7 实验结果Fig.7 Test result
5 结论
针对惯性测量系统在滚转炮弹上应用遇到的问题,给出了一种结构特殊的被动式半捷联单轴稳定平台。对被动式半捷联单轴稳定平台进行了机械动力学建模,得到了弹体在受到空气升力作用时平台内筒的动力学模型,通过计算仿真得出了弹体在受到的不同空气升力时平台内筒的滚转角速率和角度曲线。仿真计算结果表明,弹体受到的空气升力越大,被动式半捷联平台的稳定性越好,而空气升力越小,其稳定性越差,当升力小于0.000 575mpg时,平台将失去稳定状态。通过地面半实物仿真实验模拟了弹体所受空气升力等于自身重力时被动式半捷联平台内筒的滚转情况,实验结果验证了仿真计算结果和动力学模型的正确性。
References)
[1] Ali J,Fang J.Realization of an autonomous integrated suite of strapdown astro-inertial navigation systems using unscented particle filtering[J].Computers&Mathematics with Applications,2009, 57(2):169-183.
[2] 王司.战术制导武器捷联惯导系统快速传递对准研究[D].哈尔滨:哈尔滨工业大学,2008.
WANG Si.Research on rapid transfer alignment for SINS of tactical guided weapons[D].Harbin:Harbin Institute of Technology, 2008.(in Chinese)
[3] 杨华波.惯性测量系统误差标定及分离技术研究[D].长沙:国防科学技术大学,2008.
YANG Hua-bo.Research on error calibration and separation for inertial measurement systems[D].Changsha:National University of Defense Technology,2008.(in Chinese)
[4] Park W S,Ryoo C K,Kim S K,et al.A new practical guidance law for a guided projectile[C]∥AIAA Guidance,Navigation, and Control Conference.Portland Oregon:AIAA,2011.
[5] Niehus J,Mracek C P.Laser guided rocket inertial measurement unit performance determination using trajectory reconstruction[C]∥AIAA Guidance,Navigation,and Control Conference.Toronto, Ontario Canada:AIAA,2010.
[6] 段晓敏,李杰,刘俊.被动式半捷联平台的动力学模型及其稳定性分析[J].兵工学报,2014,35(9):1436-1442.
DUAN Xiao-min,LI Jie,LIU Jun.Research of the dynamic model of a partial strapdown platform and the impact analysis between the pitching angle and the stability of the platform[J].Acta Armamentarii,2014,35(9):1436-1442.(in Chinese)
[7] 刘俊,李杰,张文栋,等.一种适用于高转速飞行体姿态测量的半捷联式结构:中国,201110025476.7[P].2011-09-07.
LIU Jun,LI Jie,ZHANG wen-dong,et al.A partial strapdown structurehigh-speedforrollingflyingbody:China, 201110025476.7[P].2011-09-07.(in Chinese)
[8] Sitomer J L,Kourepenis A.Connelly J H.Micromechanical inertial guidance navigation and control systems in gun launched projectiles[C]∥AIAA Guidance,Navigation,and Control Conference and Exhibit.Portland:AIAA,1999.
[9] Dowdle J R,Thorvaldsen T P,Kourepenis A S.A GPS/INS guidance system for NAVY5”projectiles[C]∥AIAA Guidance,Navigation,and Control Conference.New Orleans:AIAA,1997.
[10] Glebocki R,Zugaj M.Gasodynamic control system for INS guided bomb[C]∥AIAA Aerospace Sciences Meeting.Orlando, Florida:AIAA,2009.
[11] Naser E S,Hou H,Niu X.Analysis and modeling of inertial sensors using Allan variance[J].Instrumentation and Measurement.2008,57(1):140-149.
[12] 尚捷.MIMU及其与GPS组合系统设计与实验研究[D].北京:清华大学,2005.
SHANG Jie.Design and experimental study on MIMU and its integrated system with GPS[D].Beijing:Tsinghua University, 2005.(in Chinese)
[13] Rouger P.Guidance and control of artillery projectiles with magnetic sensors[C]∥45th AIAA Aerospace Sciences Meeting and Exhibit.Redo,Nevada:AIAA,2007.
[14] 孙道秋.用于战术弹的半捷联式惯性导航平台[J].飞航导弹,1986(2):5-11.
SUN Dao-qiu.A partial strapdown inertial navigation platform for tactical missile[J].Winged Missiles Journal,1986(2):5-11.(in Chinese)
Influence of Air Lift on the Stability of Passive Partial Strapdown Platform
DUAN Xiao-min,LI Jie,LIU Jun
(Key Laboratory of Instrumentation Science and Dynamic Measurement,Ministry of Education, North University of China,Taiyuan 030051,Shanxi,China)
The passive partial strapdown platform which installs in rolling projectile works in the principle of compound pendulum movement under the action of gravity.Projectile flies under the action of air lift, consequently the acceleration in the vertical direction of projectile changes with the change in the lift.Accordingly the restoring torque of the platform cylinder's equivalent compound pendulum changes,and the stability of the platform would be affected.To research the influence of air lift on the stability of passive partial strapdown platform,the mechanical analyses of the projectile and passive partial strapdown platform cylinder are fulfilled,and the differential equation of motion of the platform's inner cylinder is established and solved.The stability of passive partial strapdown platform under the action of air lift is simulated.The results show that the larger the air lift is,the more stable the partial strapdown platform is.And when the air lift is less than 0.005 75mpg(mpis weight of projectile,and g is acceleration ofgravity),the passive partial strapdown platform is unstable.The semi-physical simulation test is done in the three-axis high speed turntable.The dynamic model is proved by the test.
ordnance science and technology;inertial navigation;conventional shell;air lift;partial strapdown platform
U6661
A
1000-1093(2014)11-1813-07
10.3969/j.issn.1000-1093.2014.11.012
2014-06-12
国家自然科学基金项目(50905169)
段晓敏(1983—),男,博士研究生。E-mail:dxmw@163.com;
刘俊(1968—),男,教授,博士生导师。E-mail:liuj@nuc.edu.cn