三维一体航标监测系统的研究与实现
2014-06-23方开红宋文广邬春学
方开红, 宋文广, 邬春学
(1.罗定职业技术学院电子信息系,罗定 527200;2.长江大学油气资源与勘探技术教育部重点实验室,武汉 430100;3.上海理工大学光电信息与计算机工程学院,上海 200093)
三维一体航标监测系统的研究与实现
方开红1, 宋文广2, 邬春学3
(1.罗定职业技术学院电子信息系,罗定 527200;2.长江大学油气资源与勘探技术教育部重点实验室,武汉 430100;3.上海理工大学光电信息与计算机工程学院,上海 200093)
研究了一种三维一体航标监测系统,对航标灯进行实时监控,保证内河航道的安全畅行.通过航标现场单元将监测到的信号与遥控指挥中心通过3G无线通讯网络联系起来,结合计算机软件服务平台构成一个有机整体,在遥控中心的监控平台上能对航标灯实时监测,保证航标的正常工作状态、航道的畅通.该系统将航标现场单元重要参数实时传输至监控中心,清晰地显示出航标工作现场情况,为内河航道的交通安全提供了有力的保障,节约了航道维护成本.
遥控遥测;航标;监测
新航标监测一体化系统主要用于监测航标的运行状态.航标是水上交通运行的指南针,引导船只正常运行,有着至关重要的作用.随着科技的发展,嵌入式产品的逐渐兴起,在航标监测现场单元中安装内核芯片[1].芯片具有模块化、功能化、能与服务器进行数据双向传输的结构特点,能适应水上交通恶劣的环境,可靠性高.
航标是内河航道正常运行的指示灯,白天用航标船指示航道,夜幕降临航标灯点亮,可以显示出清晰的航道,使来往船只能正常地运行.航标灯亮起,灯光照出近2 km范围内清晰的航道,左来右往的船只清晰地看到自己的航道,从而保证了船只的正常运行[2].
航标监测一体化主要是将航标船的实时动态情况及航标船周围运行环境的参数,通过监测系统自动采集后传输到航标监测现场单元芯片的存储器中[3].航标监测现场单元利用3G网络[4]将监测到的数据传输至监测中心服务器的3G网络接收端,接收到了航标监测现场单元的数据后,在服务器中利用软件进行处理,分析航标是否正常运行[5].航标监测现场单元具有三维一体的特征,三维一体是指航标船的大地坐标、时间、漂移距离这些关键参数与摄像头结合成一整体,能对航标现场进行有力的监控.
1 三维一体航标监测系统设计
航标监测现场单元是三维一体航标监测系统的核心部分,负责采集航标船自身的经纬度坐标、GPS(global positioning system)时间,计算是否发生漂移.通过安装的摄像头拍摄下航标船自身的环境,将图片数据通过3G网络传输至服务器中[6].
经纬度坐标采用GPS卫星的数据来进行求解,一般针对航道中的航标灯在同一时刻会有4颗GPS卫星来为其服务.可以根据下列方程来求解得到:

式中,(xi,yi,zi)为卫星i的经纬度;(x,y,z)为航标灯的经纬度;pi为卫星i到航标灯的距离;q为卫星到监测服务器端的距离.

式中,c为GPS卫星传输信号的速度;t为GPS传输信号至航标灯所花的时间;t0为航标灯上面的接收机因时间偏差而引起的误差校正参数.
因为GPS卫星是同步授时,则计算出q值,就可以计算出GPS授时的时间.
漂移距离

式中,(x1,y1,z1)为原始设置的航标灯的经纬度;(x2,y2,z2)为GPS卫星监测到的航标点的经纬度.
三维一体航标监测系统的功能部分主要有:
a.GPS数据接收端[7],负责接收GPS的经纬度、时间等信息.
b.航标灯控制部分,监控航标灯的正常运行状态,使之能正常运行,能为来往船只指引航行方向.
c.现场单元硬件部分,集成航标的各项基本功能,包括对GPS信号处理、GPRS(general packet radio service)信号处理[8]、航标灯的启停等硬件设备.
d.现场单元软件部分,通过编程实现软件功能,使得硬件系统集成一有机整体.
1.1 航标监测系统现场单元芯片设计
考虑到现场运行环境的因素,在设计现场单元芯片时采取核心板与底板结合的硬件开发模式来实现,其整体设计框架如图1所示.

图1 航标监测系统现场单元芯片设计框架图Fig.1 Design of unit chip framework in the beacon monitoring system
由航标监测系统现场单元芯片设计框架图可知,对外接口有GPS通信端口、A/D和D/A转换端口、摄像端口及功能升级的接口等[9].3G通信端口和USB端口与内核芯片中的数据进行双向通信,进行数据的双向交换,电源可以为内核芯片提供电能.
根据设计的框架图,实现时分为两部分来实施,一部分为核心板部分,另一部分为底板部分.核心板部分是用于整个航标监测系统现场单元芯片中相对固定的功能部分,其集成度相对比较高.核心板采用ARM9[9]、3G/GPRS、电源管理和闪存.这种方式将核心的功能块集成在内核电路板上,采用4~6层板来完成.底板部分是由通信部分、电源管理及处理逻辑等部分构成,全部集中在核心板上,所有量的输入部分将由底板来完成.
1.2 内核芯片设计
航标监测系统现场单元芯片设计的主要功能集中于内核芯片中.设计的内核芯片功能模块应该具备以下几个功能:GPS模块、3G模块、转换电路、数据采集的模数转换电路(A/D转换)、单片机模块部件、数模转换电路(D/A控制模块)、数据显示以及数据录入的键盘接口电路等.为了系统功能的升级,要预留部分端口,可根据实际情况来增加或减少系统的相关功能模块电路,内核芯片设计框图如图2所示.
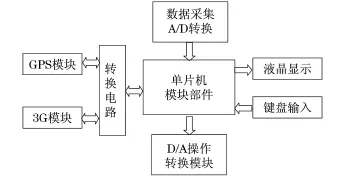
图2 内核芯片结构Fig.2 Kernel chip structure
三维一体中的关键参数如经纬度、时间都是通过GPS模块来接收GPS定位系统的数据获得到的.对GPS的应用均是直接利用其串口来获取数据,通过PC机上的GPS接收装置,与现场单元中的GPS模块通讯,首先需要将GPS模块的TTL电平转换成PC机串口可以直接读取的电平.
1.3 服务器结构设计
三维一体航标监测系统除了现场单元中获取到航标本身的三维数据之外,还要将数据传输至实时监控系统中,利用监控服务器来对整个系统中的所有航标灯进行一体化的实时监控.航标现场单元与服务器网络化系统的结构设计如图3所示.
航标监测系统现场单元与服务器网络中心之间的通信是通过3G通信网络联系起来的.3G通信网络可以将现场单元的数据发送至系统维护或监控人员手中,同步将数据传输至服务器数据库中,并且能在GIS(geographic information system)监测终端上显示出来.所有的数据可以在Web服务器端显示,也可以传输至客户端计算机上显示监测的实时结果数据.

图3 网络化系统流程图Fig.3 Flow chart network system
根据式(3)设定,当航标灯监测到d>2.5 m时,认为航标出现了明显的漂移,必须及时通过3G网络发送至系统维护人员或系统监控人员,以免影响航道的正常运行.
2 系统在内河航道管理中的应用
根据要求在内河汉江的江汉二桥附近安装了12个航标监测系统现场单元模块至航标船上.每当能见度不足300 m的时候,监控人员可以通过服务器或手机发送命令,利用3G网络传输到航标监测系统现场单元模块的芯片中,启动航标灯.在遇到大雨、大雾天气或夜幕降临时,都能正常启动航标灯,控制航标灯正常的运行,为航道的正常运行起到了关键作用,在监控中心的客户端计算机上,显示监控的航标如图4所示.
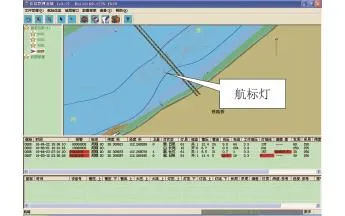
图4 客户端计算机显示实时监测数据界面Fig.4 Real-time monitoring data interface displayed on client computer
图4是某航道服务器监测中心的客户端计算机运行的实时监控界面,可以观察到每个航标的监控数据,以及在航道中的地理位置.当遇到异常数据时,监测的结果数据以红色底色突显出来.如果监测的结果数据正常,则不用突出的底色显示.
监测系统在试运行的3个月内,测得的数据如表1所示.表1中的数据是在航道水流比较平缓、天气比较晴朗的白天监测得到的.
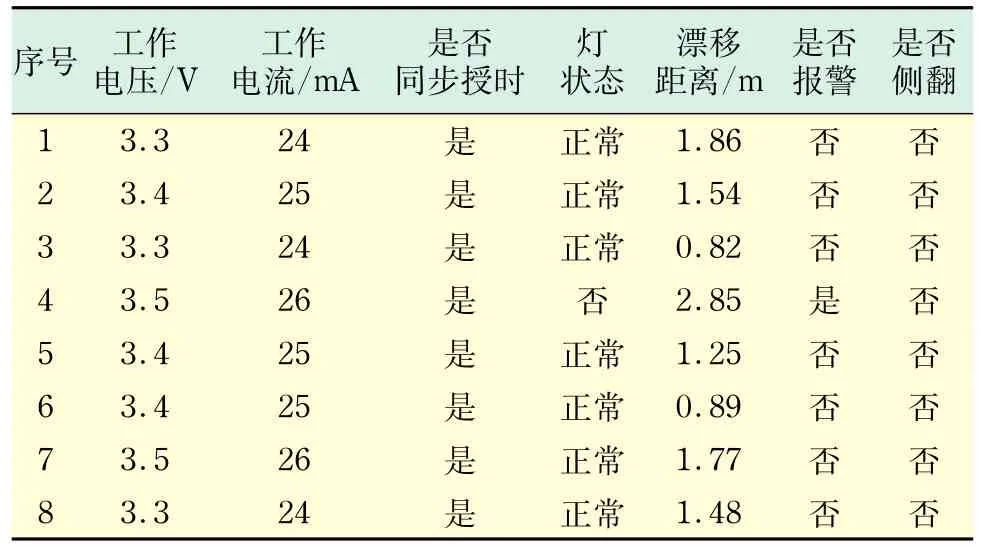
表1 新型一体化航标监测数据Tab.1 New type of integrated data in beacon monitoring
为了提高监测漂移距离的精度,在监控中心服务器端的计算机应用程序中采用GPS载波相位差分技术来校正监控单元的GPS定位精度.在航道监测中,由于航标船本身会受到水流的影响,以及航行中来往船只激起的水浪冲击,会导致航标出现偏移,一般漂移距离在2.5 m范围内都属于正常情况.因此,设定漂移距离2.5 m为阀值,当超过阀值,现场单元就发出报警信息至监控中心.
根据实测的表1数据可知,如序号为4的监测数据,当现场单元测得漂移距离超过了2.5 m的时候,就会自动报警,这就需要航道维护人员亲自去扶正该航标船,使其回到原处.同时,根据监测的数据分析发现,这时该灯虽然能工作,但不是与其它航标灯进行同步的亮灭.这说明该灯器的控制单元数据发生了改变,为了保证航标灯的同步亮灭,需要监控指挥中心发送命令,使得该航标灯重置数据,将灯器重新点亮,与其它航标灯一起接收GPS的统一授时的时间,根据这个时间来校正其亮灭的时钟控制器,使得该航标灯与其它航标灯接收GPS统一授时的时间来控制航标灯的亮灭,可以使得航道的航标灯能同步亮灭.
3 结 论
三维一体航标监测系统由航标监测系统现场单元和服务器网络两大部分构成,两者之间的数据通信通过3G通信网络联系起来.航标监测系统现场单元由内核芯片与相关外围接口构成,控制程序通过电子仪器烧入芯片中.服务器网络接收到监控中心的数据后,在后台机器中对数据进行计算和分析,当出现异常数据时可在监控端口明显地显示出来.如果需要对数据进行调整,则可以对其进行远程遥控,通过手机或服务器网络来发送监控命令,控制航标灯的运行.
在汉江的江汉二桥安装此三维一体航标监测系统,使用了近1 a的时间.在实时监测数据的界面中就可以清晰地看到航标的运行状态,节约了大量的航标维护经费.只有当航标船出现被撞翻、落水或雷电击坏等极少概率事件发生时,才会需要维护人员亲临现场维护航标灯的运行.通过比较得知,传统的航标维护人员驾船巡航少出行239次,依据每巡航一次380元成本来计算,仅此一项可以节约9.082万元.由此可见,三维一体航标监测系统研究具有一定的实际应用价值,除了能有力地保障航道的正常通行外,还能为航标维护节约大量的成本.
系统研究的创新点在于利用现有摄像头成像清晰的特点,将航标灯的经纬度坐标、时间、漂移距离这些关键参数,与摄像头结合成一整体,通过航标监测系统对航标现场进行有力的监控.
[1] Song WG.The research of one self-adapt wireless sensor network rate flow control[C]∥Proceedings of the NSWCTC 2009 Table of Contents,2009,2:267-269.
[2] Song W G.Calculation method of production log holdup using CAT instrument[C]∥Proceedings of the TCSET,2012:445-446.
[3] 孙尧,马涛,高延滨,等.自适应扩维UKF算法在SINS/GPS组合导航系统中的应用,智能系统学报[J]. 2012,7(4):105-108.
[4] 邬春学,余镇危,李冠宇.无线网络化航标监控系统及应用[J].计算机应用研究,2011,28(6):56-59.
[5] 齐英凯,徐海潮,初秀民,等.基于S57的内河船舶导航系统研究[J].航海技术,2012,19(3):37-40.
[6] 冯金芝,李君,张建武,等.装有AMT系统车辆的巡航控制试验研究[J].上海理工大学学报,2011,33(2):274-278.
[7] 陶俊勇,程红伟,王勇.导航系统的动态可靠性建模与仿真分析[J].兵工学报,2012,33(8):968-974.
[8] 高锐锋,包志华,周晖,等.基于3G网络的交通气象信息自动监测系统[J].测控技术,2014,35(2):11-15.
[9] 马慧民,吴勇,叶春明.车辆路径问题的并行粒子群算法研究[J].上海理工大学学报,2007,29(3):435-439.
(编辑:石 瑛)
Realization of a Three-dimensional Space Beacon Monitoring System
FANGKai-hong1, SONGWen-guang2, WUChun-xue3
(1.Electronic Information Department,Luoding Vocational and Technical College,Luoding 527200,China;2.Key Laboratory of Exploration Technologies for Oil and Gas Resources,Yangtze University,Wuhan 430100,China;3.School of Optical-Electrical and Computer Engineering,University of Shanghai for Science and Technology,Shanghai 200093,China)
A three-dimensional integrated buoy monitoring system capable of real-time beacon lights monitoring was developed to ensure the safety of inland waterway navigation.Abuoy field unit monitoring the signal was linked with the remote command center via 3G wireless communication network,and combining with a computer software services platform,an organic integrated,real-time monitoring system regarding beacon lights was constituted on the remote control center monitoring platform,to ensure the normal operation stste of the beacon and the smooth passing of the waterway.The important parameters detected by the buoy field unit were transmitted to the monitoring center in real time,showing a clear site condition of the beacon.The system provides a strong guarantee for inland waterway traffic safety and also the cost saving for waterway maintenance.
remote telemetry;beacon;monitoring
TP 3
A
2013-05-02
国家重大科技专项子项目(2011ZX05020-006);湖北省高等学校青年教师深入企业行动计划资助项目(Q20141312)
方开红(1978-),男,讲师.研究方向:计算机应用技术、网络视频传输.E-mail:fangkaihong815@163.com.
宋文广(1979-),男,副教授.研究方向:软件工程、生产测井.E-mail:whswg1979@126.com.
1007-6735(2014)04-0391-04
10.13255/j.cnki.jusst.2014.04.017