再生伪码测距中的码跟踪环实现
2014-06-21刘晗超简伟侯建文
刘晗超,简伟,侯建文
再生伪码测距中的码跟踪环实现
刘晗超1,简伟2,侯建文3
(1. 上海航天电子技术研究所,上海 201109;2. 解放军理工大学 通信工程学院,南京 210007;3. 上海航天技术研究院,上海 201109)
在再生伪码测距中,码跟踪环的设计是伪码测距系统的关键设计环节。根据CCSDS发布的伪码测距绿皮书,介绍了一种新型的码跟踪环的实现方式。通过对环路参数的分析,详细阐述了码片跟踪环中关键功能模块和关键参数的设计方法。以T2B码为例给出了仿真测试结果,验证了分析和设计的有效性,可用于深空探测应答机和高灵敏通信机。
码跟踪环;2倍加权平衡陶思沃斯码(T2B);中相积分器;相关累加器
0 引言
航天器测控系统最核心的任务是测量航天器相对地面站的位置和速度。在深空探测任务中,由于星地距离远,路径损耗非常大,探测器下行功率受限,直接转发上行信号将导致下行信号信噪比过低,地面站难以解调。在探测器上通过再生伪码,将测距上行链路和下行链路分隔开,使得下行链路的信号中不再包括转发噪声和残留遥控信号,从而提高下行信号的信噪比。
根据空间数据系统咨询委员会CCSDS于2009年3月发布的伪码测距的蓝皮书(正式建议书)[1]和2010年3月发布的伪码测距的绿皮书(技术原理报告)[2]的建议,星上伪码跟踪主要采用码片跟踪环(chip tracking loop)实现。码跟踪环完成对接收到的伪码信号中的钟码的跟踪,即获得数据码元的初相。本文以T2B码为例阐明码跟踪环的实现。
1 码跟踪环的工作原理
1.1 伪码结构
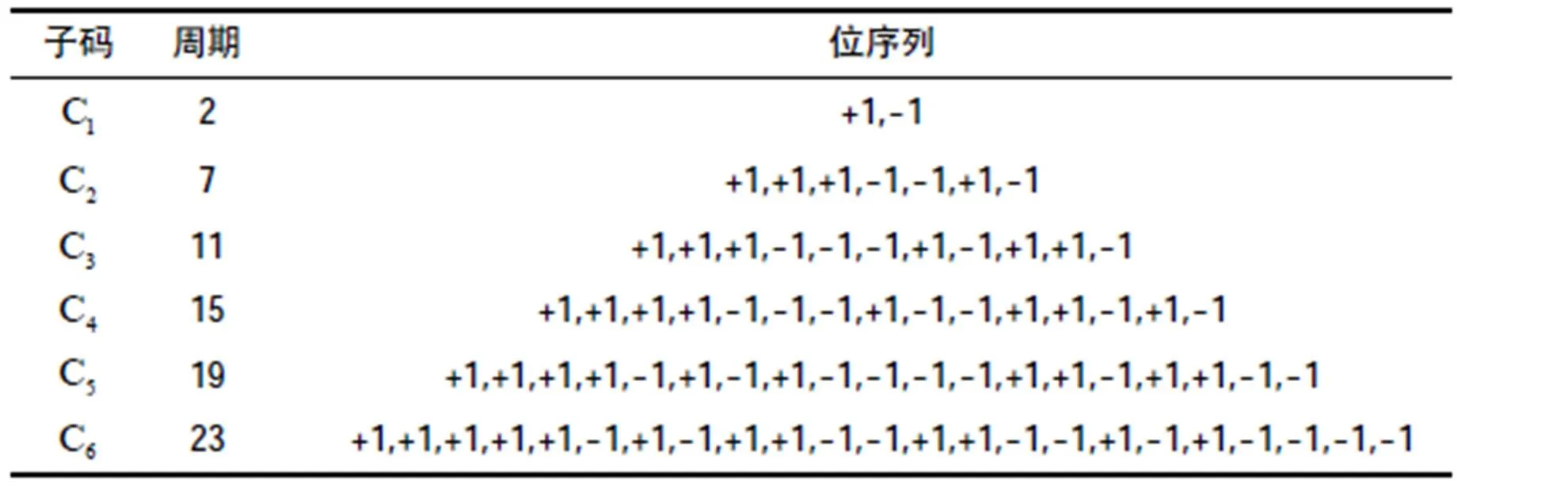
CCSDS建议选择两种伪随机码[1],被称为权重平衡陶思沃斯码(weighted-voting balanced Tausworthe),即T4B码(权重因子4)和T2B码(权重因子2)。权重平衡陶思沃斯码由6个周期的二进制子码序列通过组合算法组合而成,其中子码结构如表1所示。
表1 子码结构
伪码的表达式为




码片信噪比为
各分量码与T2B伪码的相关性是非常重要的。同相相关表示本地分量码与接收到的码同步的情况,异相相关表示本地分量码比接收到的码延迟了1到-1(为伪码周期长度)个码片。同相相关值一般在判定码同步时作为判据。为了在判定同步时去除幅度的影响,一般采用归一化的相关值。同相和异相归一化相关值如表2所示。
表2 分量码相关值

1.2 码跟踪环组成
伪码再生首先要实现码的捕获,而码捕获要首先实现码片的捕获。根据CCSDS标准,T2B码中包含了1个时钟码,存在显著的码钟分量,因此在进行测距码同步时可以首先跟踪解调测距码中的时钟分量,实现码片同步,即使接收伪码的钟码和本地伪码的钟码初始相位一致,然后再进行其余子序列的同步,这是码跟踪环(chip tracking loop,CTL)的主要功能。图1是测距码同步系统框图。
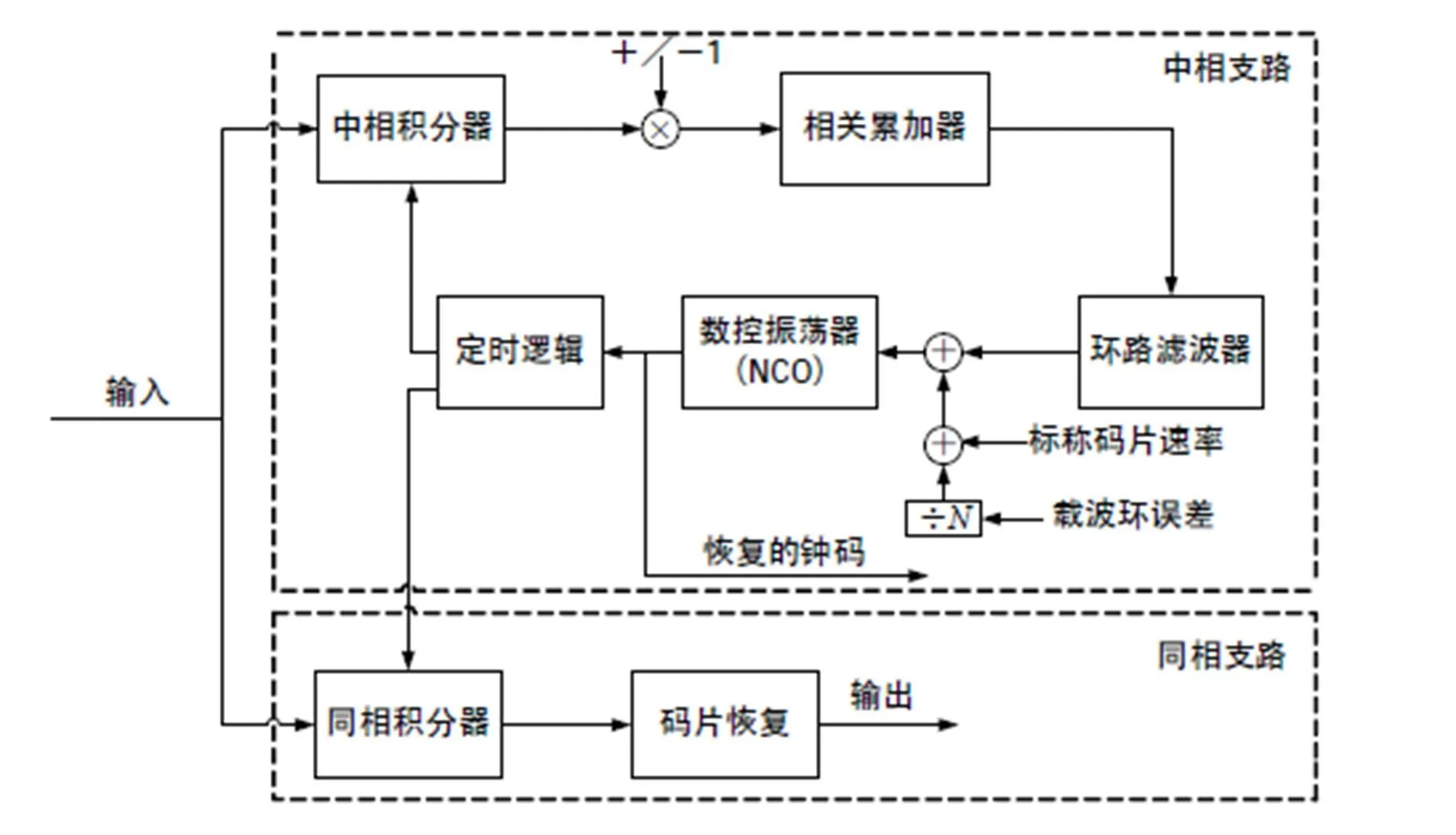
图1 测距码同步系统框图
测距同步系统由中相支路和同相支路组成。其中中相支路包括中相积分器、相关累加器、环路滤波器、数控振荡器(numerically controlled oscillator,NCO)、定时逻辑等单元,称为码跟踪环。码跟踪环类似数据转换跟踪环(data transition tracking loop,DTTL)。码跟踪环完成对接收到的伪码信号中时钟码的捕获和跟踪,即获得数据码元的初相。
中相积分器在相邻2个码片的半个周期上积分。考虑到时钟码已知,为+1,-1交替序列,故可用+1,-1交替序列代替同相积分支路的积分值,与中相积分器的输出相乘来对环路进行校正,完成鉴相功能,总积分长度为1个码片的长度。由于输入信号的信噪比太低,相关累加器需要完成多次鉴相误差的累加。环路滤波器对累加器的输出进行低通滤波,降低带外噪声和干扰等影响。码片速率的变化主要是多普勒效应引起的,利用码片速率和载波频率相干的相关关系,将载波锁定后得到的多普勒频差除以载波频率与码片速率的比值,得到由多普勒效应引起的码片速率的偏差,码片速率偏差与标称码片速率相加后得到实际的码片速率。码片速率的跟踪主要是得到码片起始位置的精确值。由于中相积分为2个相邻码片分别半周期积分相加,在不超前和滞后的情况下相加值为0,因此NCO根据积分相加值的正负控制本地伪码的超前和滞后的移动方向,完成本地伪码初始相位的调整,使其最终与接收伪码达到精确同步。
1.3 码跟踪环的性能


方差与测距的精度有直接的关系,方差越小,测距精度越高,反之,方差越大,测距精度越低。
2 码跟踪环的设计
码跟踪环的设计包含多方面的工作,这里我们仅介绍中相积分器、相关累加器、环路滤波器等关键功能模块的设计。
2.1 中相积分器的设计
图2是中相积分器原理示意图。
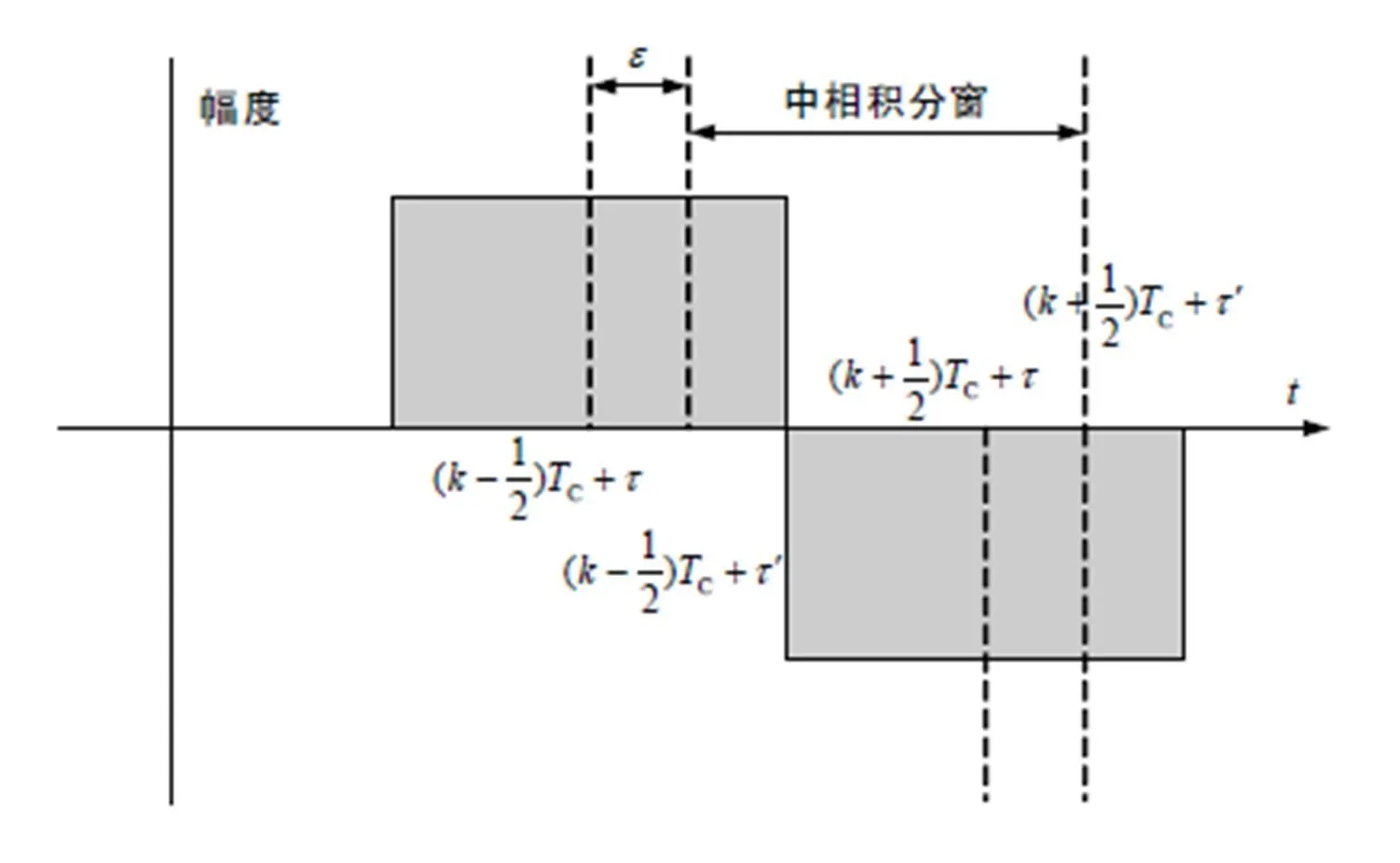
图2 中相积分器原理示意图
在图2中,假设接收伪码第个码片周期中心对应时刻为

本地伪码第个码片周期中心对应时刻为
图3 中相积分器设计示意图
2.2 相关累加器设计
相关累加器采用串行方式工作,所需积分码片数取决于码片信噪比和误码率要求。在信噪比一定的情况下,相关累加器累加周期越长,滤波器输入端的信噪比越大,从而环路滤波器输出的方差越小。反之,累加周期越短,环路滤波器输出方差越大。为提高测距的精度,希望方差尽可能小,这就要求累加周期尽可能长。但在深空测距中,由于星体对地球存在加速度,从而码片速率存在由多普勒效应引起的变化。在码跟踪环性能分析中,通常假设相关累加器的一个累加周期内,码片速率是不变的。但当累加周期太长时,码片速率不变的假设将不再成立。因此,要适当选取累加周期的长度,使其既满足测距精度的要求又可忽略码片速率受多普勒效应的影响。
2.3 环路滤波器设计
环路滤波器的设计对系统性能也有很大的影响。需要折中考虑环路频率的变化范围和环路的复杂性。这里考虑采用二阶锁相环中常用的环路滤波器。图4是环路滤波器设计示意图。
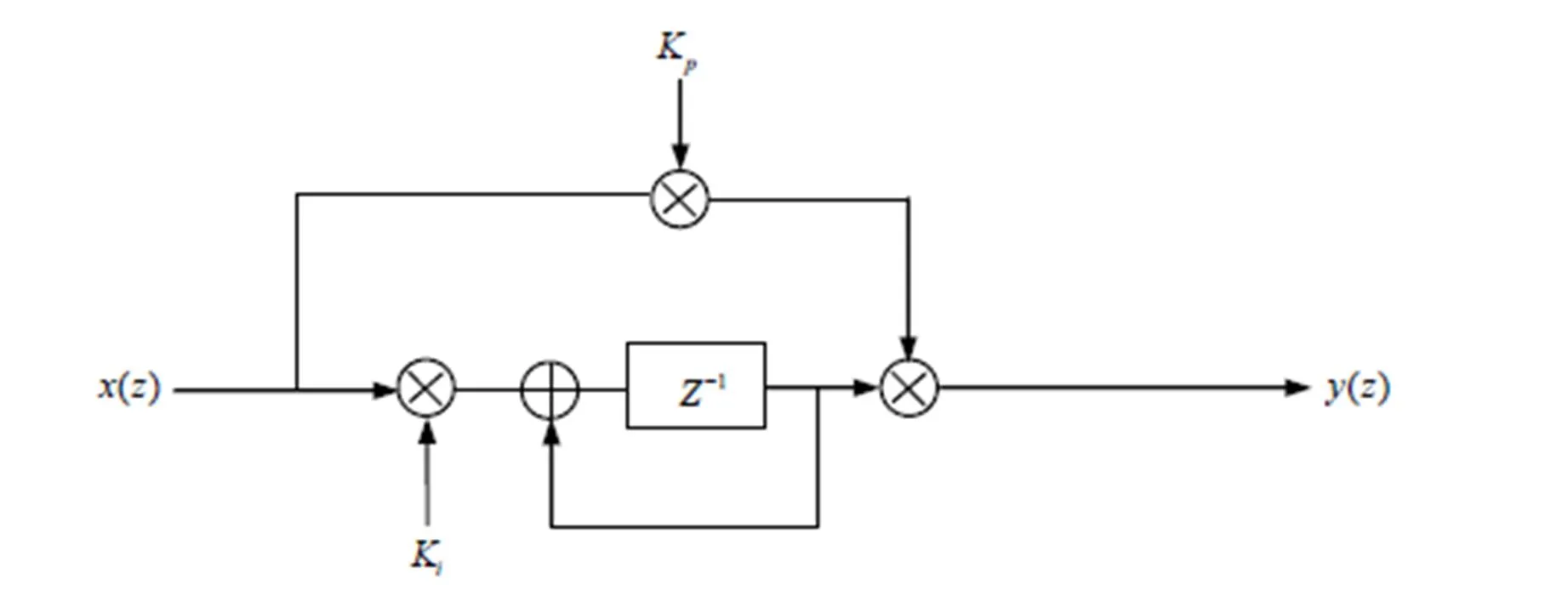
图4 环路滤波器设计示意图

这里环路更新周期实际上也是串行相关累加器的累积周期。
2.4 数控振荡器
由上文的分析可知,本地伪码滞后时,中相积分器输出小于0,对应环路滤波器输出也小于0,这时要增大本地伪码初始相位;反之,当本地伪码超前时,要减小本地伪码的初始相位[4]。
3 仿真结果
PN码CTL跟踪环路的顶层仿真如图5所示,主要包括PN码发生模块、加噪模块和CTL环路部分。仿真时可以设置加噪模块从而得到不同的输入信噪比。
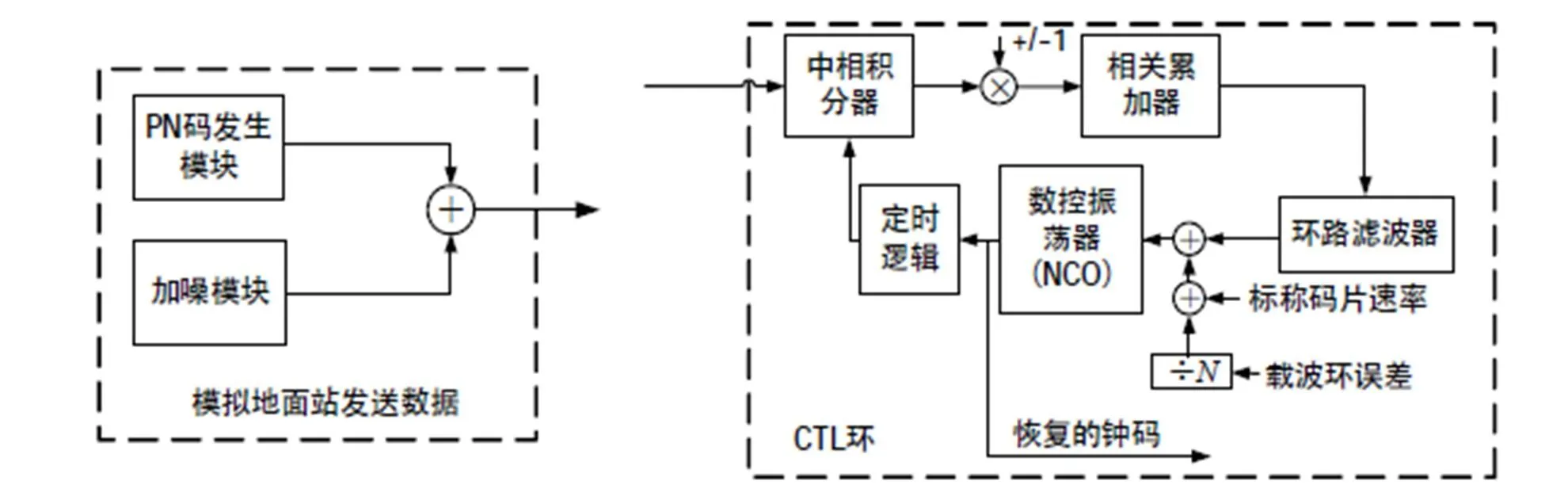
图5 PN码CTL跟踪环路顶层仿真原理框图

图6 码片速率为1 M时的仿真结果
图7 码片速率为2 M时的仿真结果
4 结语
本文根据CCSDS标准(国际标准)文件的指导,开发了一种新型的应用于再生伪码测距的码跟踪环的实现技术,已应用于当今宇航发展探索方向——深空探测测控系统,也可用于各种高灵敏通信机。再生伪码测距的关键在于时钟码的捕获和同步。本文介绍了码跟踪环关键单元的设计方法,仿真结果表明采用该设计方法得到码跟踪环路是可行的,并在实际的工程中已得到应用。
[1] Pseudo-Noise(PN) Ranging Systems. Recommendation for Space Data System Standards CCSDS 414.1-B-1[S]. Washington: CCSDS, 2009.
[2] Pseudo-Noise(PN) Ranging Systems. Informational Report CCSDS 414.0-G-1[S]. Washington: CCSDS, 2010.
[3] 张厥盛. 锁相技术[M]. 西安: 西安电子科技大学出版社, 1994.
[4] 王永庆, 高磊, 吴嗣亮. 航天器扩频测控应答机伪码跟踪环设计[J]. 北京邮电大学学报, 2010, 33(4): 49-53.
A realization of code tracking loop in PN code ranging
LIU Han-chao1, JIAN Wei2, HOU Jian-wen3
(1. Shanghai Aerospace Research Institute for Electric Communication, Shanghai 201109, China;2.PLA University of Science and Technology, Nanjing 210007, China;3. Shanghai Academy of Spaceflight Technology, Shanghai 201109, China)
The design of code tracking loop is the key point in the regenerative PN ranging system. A new code tracking loop is presented according to the Green Book published by CCSDS. Through the analysis of theparameters of the loop, the method of designing the key function model and key parameters of the chip tracking loop is expounded in detail. Simulations are given by taking T2B code as an example. The analyses and design are verified to be effective, and can be applied to the deep space transponder and high sensitive communication equipment.
code tracking loop;weighted-voting balanced Tausworthe code,=2(T2B); mid-phase integrator;accumulator
TN965
A
1674-0637(2014)02-0104-07
2013-07-24
刘晗超,女,硕士,主要从事深空探测测控技术研究。