智能炒菜机颠锅机构研究
2014-06-15廖义德邹军军余龙兵
廖义德,祝 俊,邹军军,危 则,余龙兵
(武汉工程大学 机电工程学院,湖北 武汉 430205)
烹饪是中国现代家庭中不可缺少的一项劳动,随着生活节奏的加快,工作压力越来越大,人们没有更多的时间去准备中、晚餐,因此要求烹饪自动化代替传统模式的呼声越来越高[1-2].目前出现的炒菜机还没有达到完全智能炒菜效果,一台真正意义上的智能炒菜机应该具备以下功能:送料、加调味料、调节大小火、菜肴烹饪过程、盖锅盖、倒菜、洗锅;有些菜肴还需要过油,即把菜倒出来滤掉油然后再加入菜肴的动作[3-4].智能炒菜机在炒菜过程中,能否炒出可口的菜肴很大程度取决于锅具动作机构.当前大多数炒菜机的锅具动作机构采用炒菜锅和搅拌叶片绕中心轴转动不同角度的方式,来达到均匀加热和翻炒菜的效果[5].但这种方式不能够炒鱼片和豆腐等易碎的食物,均匀加热和翻炒的效果也不是最好.为此提出一种颠锅机构,该机构能够翻炒各种类型的食物,由于把菜肴颠翻起来,菜肴能够充分和空气接触,保证了菜肴的均匀受热和鲜亮的菜色,并对其进行了相应的实验验证.
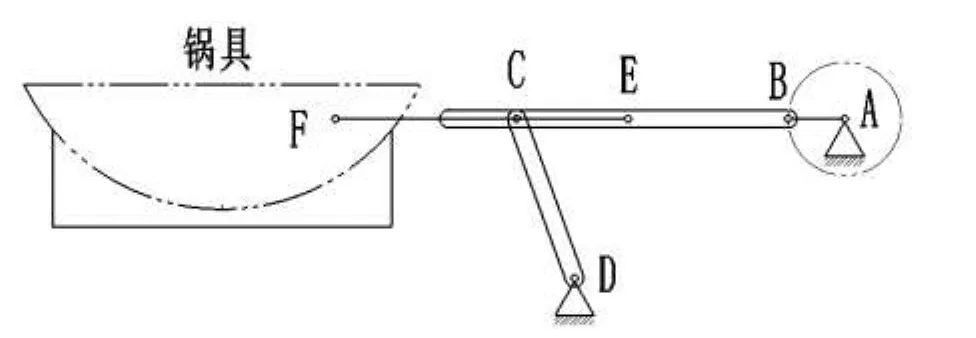
图1 巅锅机构示意图
1 炒菜机巅锅机构的设计
1.1 巅锅机构的轨迹设计
巅锅机构是智能炒菜机的核心机构,应该具备以下两个功能:首先,让菜肴在锅里均匀受热;其次,能够把菜肴翻转过来.要让炒菜机炒出菜肴的味道不亚于人工炒的,锅具的运动轨迹必须和厨师巅锅的轨迹相似[6].在该炒菜机中,锅具的巅锅动作由曲柄摇杆机构来完成.
在巅锅机构中(如图1所示),包括曲柄AB、连杆BC、摇杆CD、锅具等.为了保证机构为曲柄摇杆机构,四杆AB、BC、CD、DA的长度应该满足一定的条件,即:最短杆长度加上最长杆长度小于或等于其余两杆长度之和.其中锅具是固定在连杆BC上的E点,电机与曲柄AB连接提供旋转动力,摇杆CD支撑着锅具等结构.
曲柄作360°等角速度转动时,曲柄摇杆机构和锅具都有着自己的运动轨迹(如图2所示).在各个运动轨迹中,锅底中心处的运动轨迹决定着巅锅过程中是否能够把菜肴颠翻起来.通过二维绘图软件绘制出曲柄每转动45°时,各杆和锅具所处的位置.在轨迹图中标出锅具底部中心处在8种状态所处的位置,并依次编号1、2、……、8,连接该8点所得的轨迹就是锅具在颠动过程的轨迹.

图2 巅锅机构运动轨迹图
1.2 巅锅机构的运动分析
在该巅锅机构中,对锅具的运动性能分析,需计算其速度、加速度、角速度和角加速度[7].锅具由杆EF固定在杆BC上.锅具运动的速度和加速度,取锅具上F点来分析;锅具运动的角速度和角加速度,则需要对杆BC或杆BF进行分析(如图3所示).
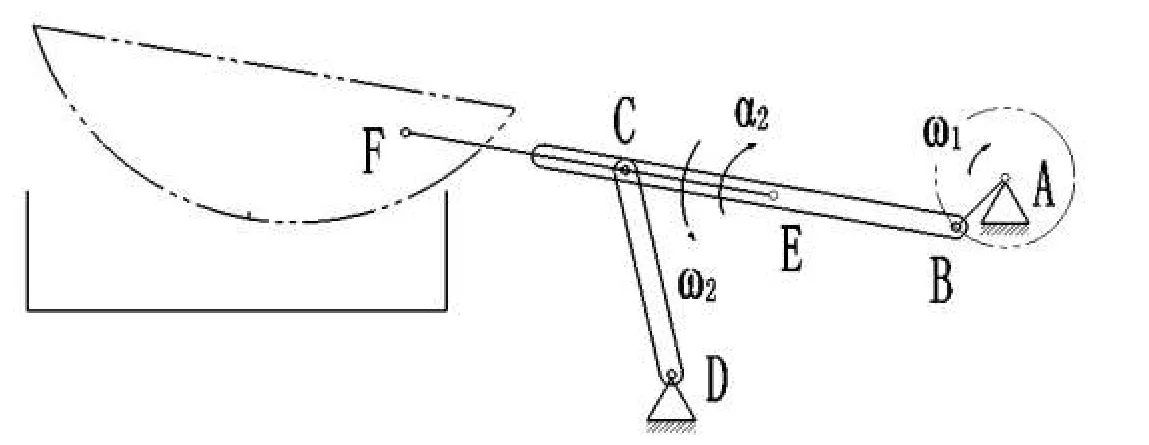
图3 巅锅机构运动分析图
巅锅机构中,曲柄AB由电机驱动,已知其角速度为w1,曲柄AB的长度为lAB,B点速度 vB的方向与AB垂直,其大小为:

B点的加速度aB只有法向加速度anB,其大小为:

锅具上的F点对B点的相对法向加速度anFB大小为:

和锅具连接的F点的速度vF和加速度aF的矢量方程分别为:

将式(1)、(2)、(3)分别代入式(4)、(5),经过整理得到锅具上F点的速度 vF和加速度 aF的矢量方程:

式中,F点相对B点的速度vFB大小可以作速度多边形求解,而F点对B点的相对切向向加速度atFB大小作加速度多边形可以求解.
由于锅具中杆EF和杆BC可作为一个整体来看待,因此锅具的角速度w2和角加速度a2即为杆BC或杆BF的角速度和角加速度,可以取锅具上的F点来求得,其大小为:

2 炒菜机巅锅机构的运动仿真
完成巅锅动作的曲柄摇杆机构,其中曲柄、连杆、摇杆任何一个长度的改变,就会影响巅锅的轨迹.如果每改变一个长度来确定巅锅的轨迹,则会带来很大的工作量,并且还不能保证巅锅的效果最好.通过Visual Basic软件,我们能够清晰地仿真出不同参数时巅锅运动的轨迹,减少了工作量并节省了产品开发的成本.
在Visual Basic软件的界面上,设计出曲柄连杆、摇杆、曲柄角速度的文本标签和命令按钮,分别定义各个标签和按钮的属性.在程序里,根据曲柄摇杆机构各杆长度和曲柄角速度的变化,编写成相应的执行语句,即可实现巅锅运动的仿真.在仿真界面上,我们可以清楚地看到运动时锅具和杆的运动轨迹(见图4).
通过对锅具运动轨迹的比较,选择出和厨师巅锅轨迹近似的那组参数,并根据这些参数做成巅锅机构的实物进行实验验证.
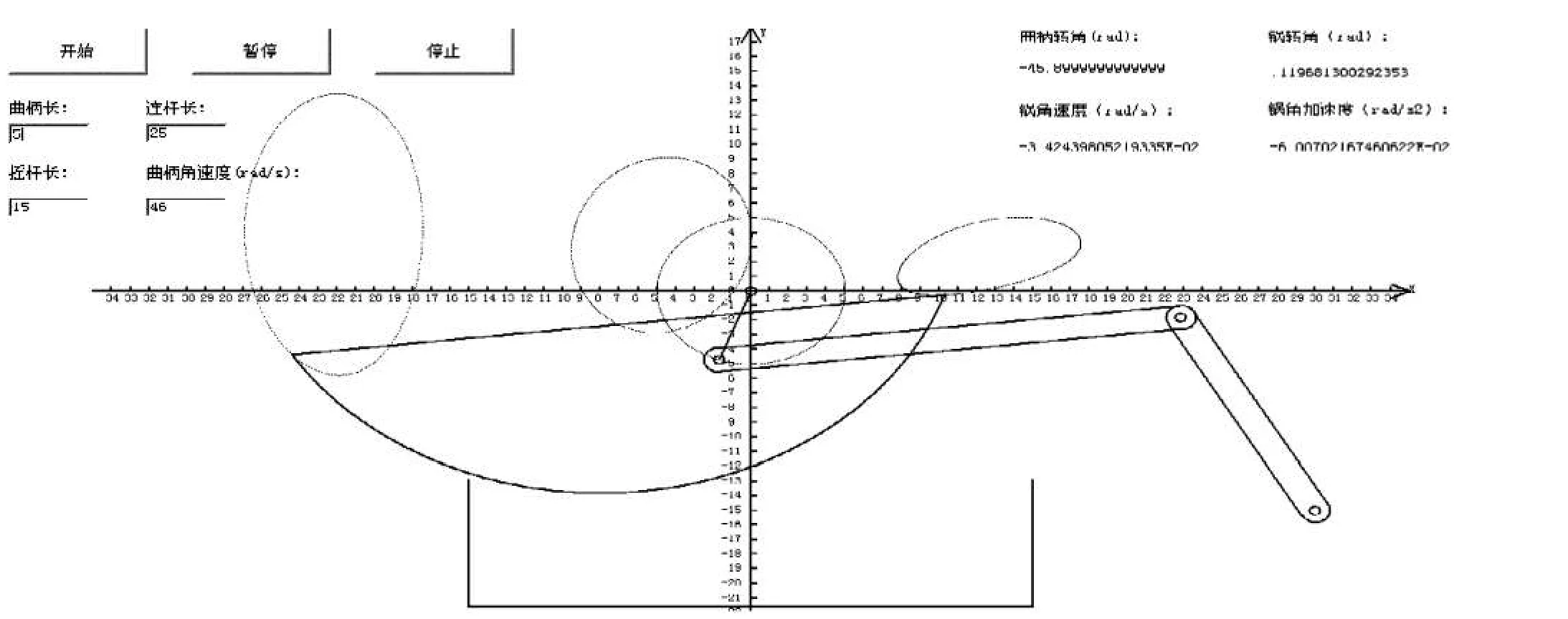
图4 巅锅机构的运动仿真图
3 实验
3.1 实验目的及设备
为了验证该方法的正确性,专门设计了巅锅机构来进行实验.巅锅机构(如图5所示)主要由电机、曲柄摇杆机构、锅具、机架等部分组成.
3.2 实验内容
通过改变变频器的频率,使得电机提供给曲柄不同的转速.本实验所用电机为三相异步电机,工作电压为380 V,转速为1440 r/min.根据巅锅机构运动仿真的数据,该巅锅机构实物(如图6所示)的曲柄长度lAB=50 mm,连杆长度lBC=240 mm,摇杆长度 lCD=150 mm,杆BF长度 lBF=400 mm.根据式(6)~(9)计算出巅锅运动时vF、aF、w2、a2的值,变频器选取5个不同的频率来做巅锅对比实验,记录巅锅时翻菜的效果.实验结果如表1所示.
3.3 结果分析
由表1可知,巅锅机构各杆长度一定的前提下,随着变频器频率的变大,巅锅动作的速度越来越快,幅度也越来越大.变频器频率为55 Hz时,菜肴正好被翻起;频率为45 Hz时,菜肴正好不被翻起;频率为65 Hz时,菜肴基本上被慢慢颠翻到锅具外面.变频器频率为50 Hz、60 Hz时,则是翻菜效果的过渡点.造成这一现象的主要原因是:巅锅轨迹不变的前提下,巅锅速度越快,锅具中菜肴受力越大.

图5 巅锅机构的设计图

图6 巅锅机构实物图
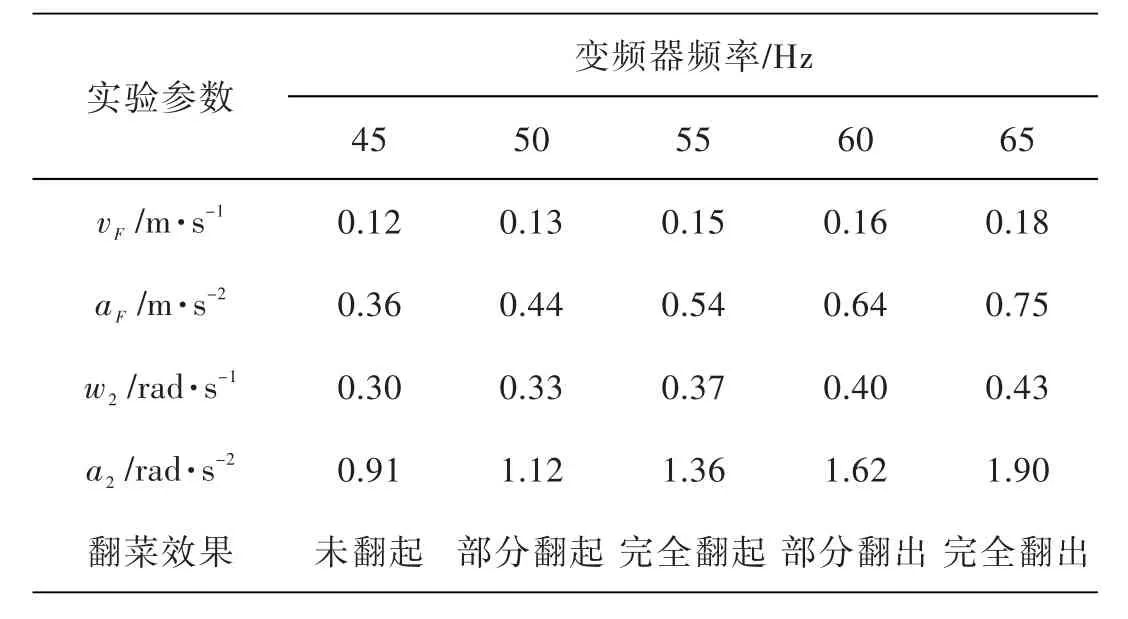
表1 实验结果
4 结语
智能炒菜机巅锅机构成功解决了菜肴受热不匀和菜肴搅烂的问题,并且能够保证炒出菜肴的品质.
通过巅锅运动仿真的方法,快速准确地找到巅锅运动的轨迹,提高了产品设计效率,并降低了成本.实验证明,本文设计的巅锅机构完全满足使用要求.为此类机构的设计提供了有价值的理论方法.
[1]Weixin Yan,Enguang Guan,Wentao Ma,et al.Automatic cooking robot with a novel feeding system[C]//ICIRA 2010,Part I,LNAI 6424.Berlin Heiderg GER:Springer-Verlag,2010:519-529.
[2]唐建华,周晓燕,刘小勇.中国菜肴自动烹饪机器人的研究现状与展望[J].扬州大学烹饪学报,2007(2):24-26。
[3]Yuan Chen,Zongquan Deng.Bing Li.Numerical simulations of motion behaviors of pan mechanism in a cooking robowith granular cuisine[J].Joumal of Mechanical Science and Technology,2011,25(3):83-88.
[4]刘军.论中国的“烹饪”文化[J].成都理工大学学报:社会科学版,2003,15(3):19-24.
[5]赵兴,闫维新,赵言正,等.基于DSP和CPLD的自动烹饪机器人设计[J].机器人,2007,29(5):469-470.
[6]周晓燕,唐建华,赵言正,等.自动烹饪机器人锅具运动机构的设计原理[J].食品科学,2007,28(3):373-374.
[7]陈赛克,凌轩.基于Solidworks齿轮连杆机构的运动仿真[J].食品与机械,2012,28(6):177-179.
