基于遗传算法的反导拦截弹助推段自动驾驶仪的设计
2014-06-15堵会晓
堵会晓,黄 靓
(平顶山工业职业技术学院,河南 平顶山 467001)
基于遗传算法的反导拦截弹助推段自动驾驶仪的设计
堵会晓,黄 靓
(平顶山工业职业技术学院,河南 平顶山 467001)
针对反导拦截弹助推段一般不进行大机动飞行、弹道相对平直的特点,基于小扰动线性化方程,设计了由阻尼回路、攻角回路和过载回路组成的三回路自动驾驶仪。在理想弹道计算的基础上选取特征点,在每个特征点处将弹体简化为二阶环节来近似。针对待优化参数多、且处于不同控制回路的特点,采用遗传算法对控制器参数进行优化。仿真结果证明所设计的控制器能够很好地跟踪指令信号。
反导拦截弹,遗传算法,自动驾驶仪
引言
反导拦截弹是美国研制的高空导弹拦截系统,主要防御中远程战区级弹道导弹,它集成了红外成像、动能直接碰撞、能量管理控制机动、气动光学、推力矢量控制、气动力/直接力复合控制等技术,是现在世界上先进的防空导弹之一。
反导拦截弹助推段大范围机动一般不进行,弹道较为平直,基于小扰动线性化方法设计自动驾驶仪是一个简单却很有效的选择。阻尼回路和攻角回路采用PID控制器,过载回路由比例控制器、PID控制器和二阶振荡环组成。由于待优化的控制器参数众多,且处于不同的控制回路中,利用一般的优化算法有一定难度,而遗传算法模拟自然界生物的进化过程,具有不依赖问题本身,不容易陷入局部最优和隐含并行性等特点,能够快速有效地搜索复杂、高度非线性和多维空间[1-2],这里采用遗传算法优化控制器参数,仿真结果证明本文设计的控制器对跟踪俯仰角速度、攻角和过载指令信号等有较好的控制作用。
1 反导拦截弹助推段数学模型
反导拦截弹外形如下页图1所示。图1中,cg为拦截弹质心,V为拦截弹速度,α为攻角,θ为弹道倾角,T为助推器矢量推力大小,δT为矢量推力与弹体纵轴间的夹角。α、θ、δT均以逆时针方向为正。反导拦截弹弹体为无翼外形,尾部有扩张围裙。弹体前段为动能杀伤器,其中部和后部分别安装有轨控和姿控发动机;后段为助推器,其尾部的活动喷管能够实现推力矢量控制。在助推段,处于节约燃料的目的,一般不使用姿控和轨控发动机,仅仅使用助推器活动喷管提供的矢量推力实现转向和姿态控制。
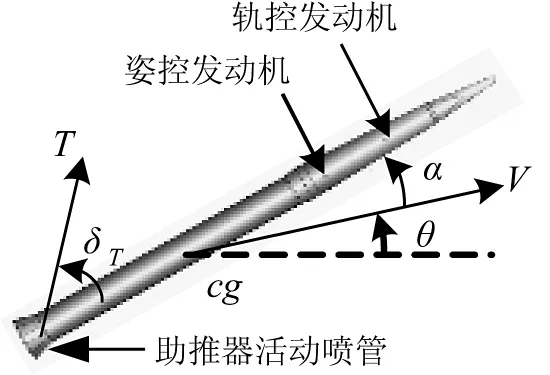
图1 反导拦截弹
反导拦截弹飞行阶段可以分为助推段飞行、中段飞行和末段飞行。助推段飞行时间长约17 s,在助推器的作用下稳步加速以达到指定拦截速度,并在地基雷达的指引下飞向预测拦截点。这个阶段一般不做大机动飞行,攻角、侧滑角和滚转角速度都很小,俯仰、偏航通道间的耦合作用可以忽略不计[3],因此,可以利用基于弹道特征点的小扰动线性化方法设计自动驾驶仪。
由于俯仰、偏航通道间的近似解耦,其数学模型和设计原理类似,此处仅研究俯仰平面的线性化动力学模型。助推段俯仰平面小扰动线性化方程为[4]


2 自动驾驶仪的设计
由方程组(1)容易得到反导拦截弹弹身环节的各个传递函数,即

反导拦截弹为了提高机动性能,采用静不稳定弹体设计,其弹身环节开环响应特性很差。为了改善弹身环节的响应特性,本设计的反导拦截弹倾向稳定回路由阻尼回路、攻角回路和过载回路组成,如图2所示,输入为指令过载,输出为实际过载。C1、C2、C3、C4、C5为待设计控制器。忽略角速度陀螺、攻角传感器、加速度表的动态特性,认为其传递函数为近似为1的比例环节,并对输出攻角、加速度、矢量推力偏角限幅。

图2 俯仰平面内三回路闭合控制系统
设计时,控制器在回路中的位置及形式对性能影响很大。为了保证闭环回路具有良好的动态和稳态响应特性,经过仿真实验,选取阻尼回路、攻角回路、过载回路的控制器在控制回路中的位置如图2所示。阻尼回路控制器C1为PID控制器,其形式为

攻角回路控制器C2为PID控制器,其形式为

过载回路控制器由比例控制器C3、PID控制器C4和二阶振荡环节C5组成,其形式分别为
其中 kp1、ki1、kd1、kp2、ki2、kd2、kp3、ki3、kd3、kc、a、b、c、d为待设计参数。过载回路中控制器C5选择二阶环节,其主要原因是克服控制器C1、C2、C4引起的模型阶数变化带来的不利影响。
3 基于遗传算法的控制器参数寻优
以前PID控制器设计时,往往采用经验试凑法,设计工作费时费力。当被控对象稳定且模型相对简单时,可以采用Ziegler-Nichols方法进行设计[5]。若通过解析方法求解PID控制器参数,需要给定具体的频域、时域性能指标,但设计过程较繁琐。由于反导拦截弹为静不稳定弹体,待设计的特征点数量较多,采用传统的设计办法要么不可行,要么工作量很大。根据遗传算法的特点,只要将控制器的参数构成基因型,将性能指标构成相应的适应度,便可利用遗传算法来整定控制器的最佳参数[7]。
在利用遗传算法优化控制器参数时,按照先内环(阻尼回路)、再中环(攻角回路)、最后外环(过载回路)的顺序逐层优化。每一层的参数在得到最优解后不再变动,在内环控制器参数固定的情况下再设计次外环控制器参数。利用该方法不但可以降低寻优过程的复杂度,而且可以保证每一层具有期望的性能。
首先对各环控制器参数分别进行编码,再把子串连接成一个完整的染色体。标准的遗传算法中采用的是二进制编码,但是由于控制器参数均是以实数形式存放的,若采用二进制编码会造成编码串过长,从而降低学习效率,同时量化误差存在于编码和解码过程中,在一定程度上会影响精度。因此,本文直接采用实数编码[8],它不但能提高运算速度及精度,而且在搜索空间较大时其优点会更突出。
最小目标函数作为每一回路输出误差的绝对值积分性能指标的选择依据,控制能量大小选择要合适,因此,目标函数应增加控制输入u(t)的平方项,其目标函数为

式中:w1、w2为权重系数。e(t)为每一回路的输出误差。
考虑到实际情况,需要对输出攻角、加速度、矢量推力偏角限幅,由于遗传算法不能直接应用于有约束的优化问题,利用罚函数法将有约束问题转化为无约束问题是解决问题的一种方法,其基本思想是通过对违背约束的点施以罚函数来降低其适应度,减小其遗传到下一代的概率。本文中给原目标函数添加惩罚项


在本文的遗传算法操作过程中,选择概率的计算是针对适应度的值确定的,一般应遵循适应度越大,选择的概率越高。此处适应度函数[9]取为

交叉算子选用算术交叉。假设在两个个体xa和xb之间进行算术交叉,Pc为交叉概率,那么交叉运算产生的两个新个体是


变异概率取为

其中,e为回路输出误差,C为常数。当输出误差e较小时,变异概率Pm也较小。在进化初期,变异的范围相对较大,随着进化的进行,变异的范围越来越小,可起到对进化微调的作用。
4 仿真结果及分析
反导拦截弹助推段飞行时间长约17 s左右,速度由30 m/s左右增加到2 800 m/s。选取反导拦截弹的飞行速度为弹道特征点,利用遗传算法,得到控制器C1、C2、C3、C4、C5在特征点处的控制器系数,如图3~图7,从图中可见,各个控制器参数变化范围不大,这有利于控制器的实际应用。遗传算法中交叉概率的一般取值范围为Pc∈[0.1,0.9],变异概率的一般取值范围为Pm∈[0.001,0.2],种群规模取为30。

图3 阻尼回路PID控制器C1参数
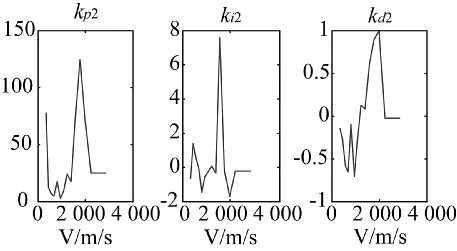
图4 攻角回路PID控制器C2参数

图5 过载回路比例控制器C3参数
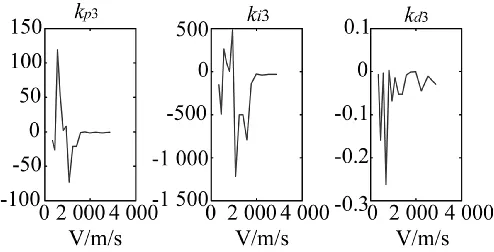
图6 过载回路PID控制器C4参数
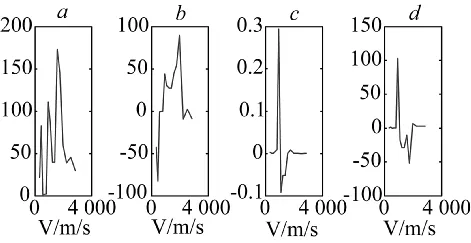
图7 过载回路二阶振荡环节C5参数
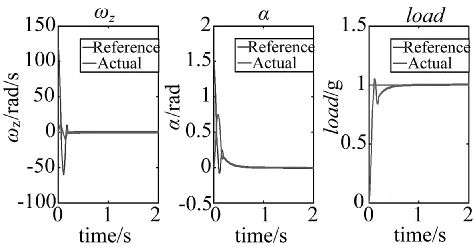
图8 特征点一:速度V=340 m/s
图8~图10给出了3个特征点处俯仰角速度、攻角、过载的响应曲线,图中ωz为俯仰角速度,α为攻角,load为过载。令输入信号为单位阶跃指令过载。可见,输出过载信号大概在0.5 s左右就可跟踪指令过载信号,超调量小,稳态误差小,具有很好的性能。同时可以看到,阻尼回路和攻角回路也能很好地跟踪输入信号。
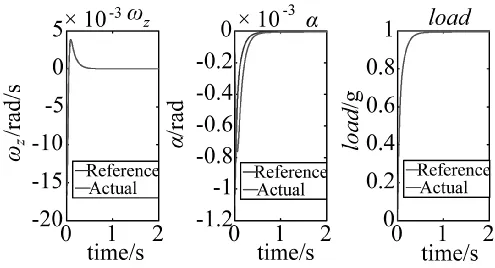
图9 特征点二:速度V=1 080 m/s

图10 特征点三:速度V=2 800 m/s
5 结 论
针对反导拦截弹在助推段一般不做大机动飞行、弹道较为平直的弹道特点,设计了由阻尼回路、攻角回路、过载回路组成的三回路自动驾驶仪,并利用遗传算法对控制器参数进行寻优。仿真结果表明,所设计的控制律能有效地跟踪指令信号。
[1]韩瑞锋.遗传算法原理与应用实例[M].北京:兵器工业出版社,2010:216-222.
[2]William B L,Riccardo P.Foundations of Genetic Programming[M].New York:Springer-Verlag,2010:124-130.
[3]David C F,Christian H T,Shtessel Y B.Interceptor Missile Control:A New Look at Boost and Midcourse[C]//AIAA Guidance,Navigation,and Control Conference,Toronto,Canada,2010:1-25.
[4]钱杏芳,林瑞雄,赵亚男.导弹飞行力学[M].北京:北京理工大学出版社,2008:98-105.
[5]王 伟,张晶涛,柴天佑.PID参数先进整定方法综述[J].自动化学报,2000,26(3):347-355.
[6]吕 飞,郑鲲鹏.舵机反操纵对于自动驾驶仪稳定性的影响[J].四川兵工学报,2013,34(6):8-10.
[7]Zhu S P,Fu W W,Yang J.Applying Genetic Algorithm to Optimization Parameters of Missile ControlSystem[C]// Ninth International Conference on Hybrid Intelligent Systems,Shenyang, China,2009:416-419.
[8]Tsoulos I G.Modifications of Real Code Genetic Algorithm for Global Optimization[J].Applied Mathematics and Computation,2008,203(2):598-607.
[9]邹 强,尹肖云,彭绍雄,等.HTK反导拦截弹瞄准点的一种优化选取方法[J].火力与指挥控制,2012,37(8):28-30.
Boost Phase Autopilot Design of Anti-missile Interceptor Using Genetic Algorithm
DU Hui-xiao,HUANG Liang
(Pingdingshan Industrial College of Technology,Pingdingshan 467001,China)
The anti-missile interceptor usually does not execute large overall maneuvering flight,and the trajectory is flat in the boost phase.The small disturbance linearized equations are used to design the three-loop autopilot,including the damping loop,the angle of attack loop,and the overload loop.Characteristic points are chosen based on ideal trajectory.The missile model is simplified as a second order one on each characteristic point.Since lots of parametes in different control loops are to be optimized,it is difficult to use the general optimization method.Here we use genetic algorighm to optimize the controller parameters.The simulation results show that the proposed scheme can track the command signals exactly.
anti-missile interceptor,genetic algorithm,autopilot
TJ761.7
A
1002-0640(2014)11-0157-03
2013-08-05
2013-11-07
堵会晓(1974- ),女,河南平顶山人,硕士,讲师。研究方向:自动控制。