电液伺服阀用压电叠堆驱动器动态特性研究
2014-06-04彭畅曹树平罗小辉
彭畅,曹树平,罗小辉
(华中科技大学机械科学与工程学院,湖北武汉 430074)
压电陶瓷具有正逆压电效应,可实现机械学量与电学量之间的相互转换,并具有体积小、结构简单、能量密度高、易于集成化、能耗低等许多优点,已广泛应用于液压阀驱动、高精度直线驱动器、精密步进机构、力学传感器等方向,是一种具有广阔应用前景和巨大发展潜力的器件[1]。
压电型电液伺服阀的研究是压电学、流体动力学、电子学以及自动控制学科相结合的一项工作,是多学科交叉的研究领域,而压电驱动器作为压电型电液伺服阀的电气—机械转换器件,是压电伺服阀的关键器件,其性能直接影响着整个压电伺服阀的性能。因此,有必要对压电驱动器的相关理论和特性作系统深入的研究,这将为压电叠堆驱动器的设计提供指导并优化压电叠堆驱动器在电液伺服阀中的应用。
尽管相关文献[2-4]中的研究结果对压电叠堆驱动器的应用提供了一定的指导,但这些研究分析都是在准静态条件下进行的。针对系统相关参数对压电叠堆驱动器动态性能的影响,目前还较少有相关的研究。因此,主要在动态条件下研究系统阻尼系数、系统等效质量、压电叠堆刚度等不同参数对电液伺服阀用压电叠堆驱动器应用性能的影响。
1 压电叠堆驱动器
压电叠堆驱动器结构简图如图1所示。
假设压电陶瓷片沿厚度tn变形均匀,当仅在压电陶瓷片的极化方向 (片厚方向)作用电压U、外力Fs时,由压电材料的第一类压电方程[1]得,压电陶瓷片的变形量xn为

式中:为恒定电场情况下压电陶瓷的弹性柔度阵;
As为该压电陶瓷片的横截面积;
d33为该压电材料的压电应变系数。

图1 压电叠堆驱动器结构简图

文中所用压电叠堆型号为:XP 6×6/20。该压电叠堆驱动器使用180片厚度为0.1 mm的压电陶瓷片粘制而成。当驱动电压为150 V时,设计最大输出位移在自由状态下为20 μm。
则由n片压电陶瓷片粘合而成的压电叠堆的轴向输出位移为
2 伺服阀用压电叠堆驱动器系统模型
针对所讨论的压电型电液伺服阀系统中所使用的压电叠堆驱动器,建立了如图2所示的压电叠堆驱动器系统模型。

图2 压电叠堆驱动器系统模型
在图2中,通过预压力施加装置给压电叠堆施加预压力后,弹簧的预压缩量为x1,压电叠堆的预压缩量为x0。因此有

其中:ks为压电叠堆的刚度;
Es为压电叠堆的弹性模量;
ls为压电叠堆的长度。
对压电叠堆驱动器系统进行受力分析,外部负载主要有惯性力、弹簧力、阻尼力、液体的压力、液动力。因此

对式 (6)两边取Laplace变换,令m'=me+m得到

式中:me为压电叠堆的等效质量,其大小为压电叠堆质量的1/3;
m为预压力装置产生的附加质量;
B为系统阻尼系数;
pc为液体压力;
A为液体压力作用面积;
FR为因液体流动方向和速度的变化造成的液动力。因流速变化非常小,其值约为弹簧力的1/100,通常可以忽略。
考虑到压电叠堆的预压缩量为x1,外部负载方向与压电叠堆驱动器变形方向相反。将式 (4)、式(5)代入式 (2)并化简,得到压电叠堆驱动器系统的运动学方程为

由式 (7)可知,压电叠堆驱动器系统的的输出位移x为驱动电压U和液体压力pc同时作用时两输出位移的线性叠加。
U(s)作用下压电叠堆驱动器系统的传递函数为

上式GU(s)也可表达为

pc(s)作用下压电叠堆驱动器系统的传递函数为

总输出位移

3 压电叠堆驱动器系统动力学仿真分析
根据上一节所建立的压电叠堆驱动器系统动力学模型,确定模型中的各个参数,利用 MATLAB对压电叠堆驱动器系统进行仿真分析。
该系统的具体参数如下:压电叠堆刚度ks=49 N/μm,压电叠堆的层数n=180,压电常数d33=635×10-12C/N,弹簧刚度k0=7.12 N/μm,系统的阻尼系数B可根据阻尼比的定义获得,系统的等效质量m'=0.03 kg。
3.1 驱动器系统的时域分析
如图3和图4所示分别为GU(s)和Gpc(s)的阶跃响应曲线。如图3所示,GU(s)的阶跃响应稳态输出位移大小为0.1 mm,而如图4所示,Gpc(s)的阶跃响应稳态输出位移大小约为1.1×10-6mm。

图3 GU(s)的阶跃响应

图4 Gpc(s)的阶跃响应
由图5可知,Gpc(s)的阶跃响应值相对于GU(s)的小很多。故下文主要分析传递函数GU(s)的时间响应特性。
图6为在不同阻尼比条件下GU(s)的阶跃响应特性曲线。可知:系统的阻尼比对系统的超调量、调整时间均产生了影响。系统的阻尼比越大,系统的超调量越小,当阻尼比接近或大于0.707时不再产生超调现象。系统的调整时间随阻尼比的增大而减小。
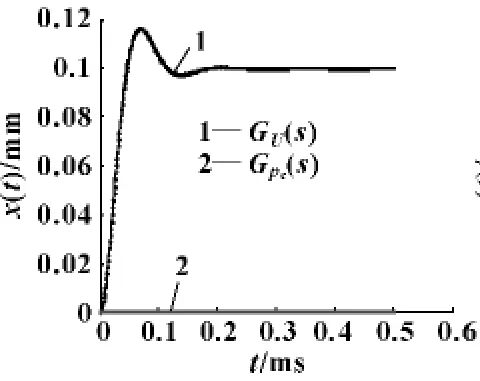
图5 GU(s)和Gpc(s)的阶跃响应

图6 阻尼比对阶跃响应的影响
图7研究了压电叠堆驱动器系统的等效质量对GU(s)的阶跃响应特性的影响。可以看出:随着系统等效质量的增大,系统峰值建立的时间也逐步增大,因而减小系统等效质量可以提高动态响应特性。
图8为不同压电叠堆刚度ks条件下GU(s)的阶跃响应特性曲线。可知:压电叠堆的刚度越大,系统的调整时间越小,响应速度越快;随着压电叠堆刚度的增加,系统的峰值建立时间逐渐减小。

图7 系统等效质量对阶跃响应的影响

图8 压电叠堆刚度对阶跃响应的影响
3.2 驱动器系统的频域分析
如图9所示为系统的伯德图,可知系统的幅频宽约为1 490 Hz,相频宽约为1 010 Hz。由幅频特性曲线可知,在所测的频段内,系统的位移输出出现了谐振现象,该系统的谐振频率约为130 Hz。
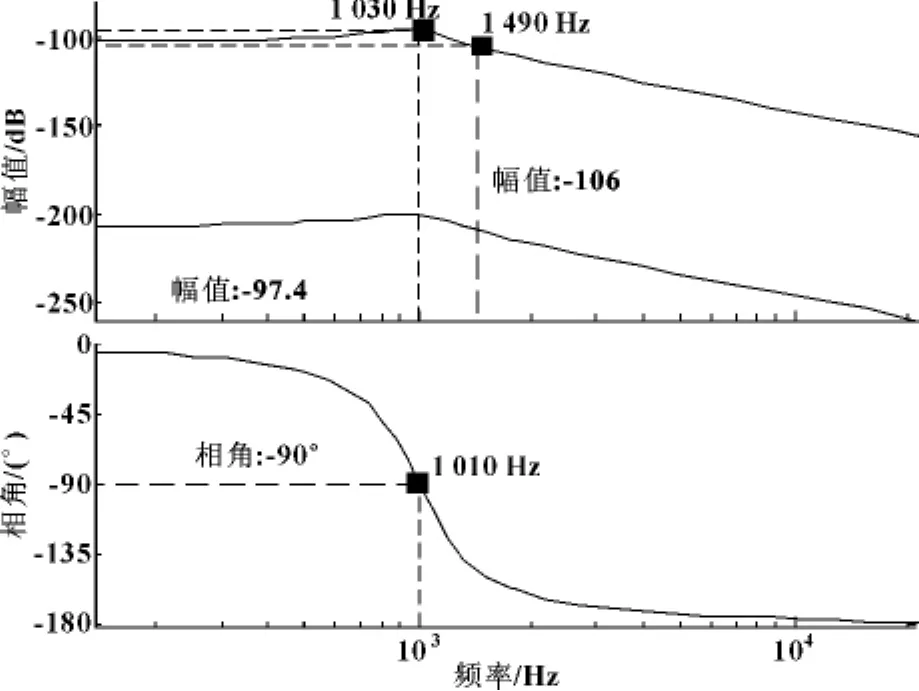
图9 系统伯德图
压电叠堆驱动器的振幅是影响压电伺服阀输出流量的主要因素。因此,进行压电叠堆模型的频域分析显得尤为重要。下文以输出的幅值和相位角这两个参数来预测压电叠堆驱动器系统的稳态输出。
假设压电叠堆的输入电压信号为Usin(ω1t),系统液体压力信号为pcsin(ω2t)。
输出x01(t)在稳态时可以描述为[5]

U为输入电压信号的幅值 (V);
φU为GU(jω1)的相位角(rad)。
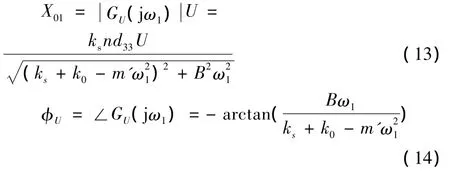
由式 (8)得到

所以,Usin(ω1t)作用下压电叠堆驱动器系统的幅值和相位角为
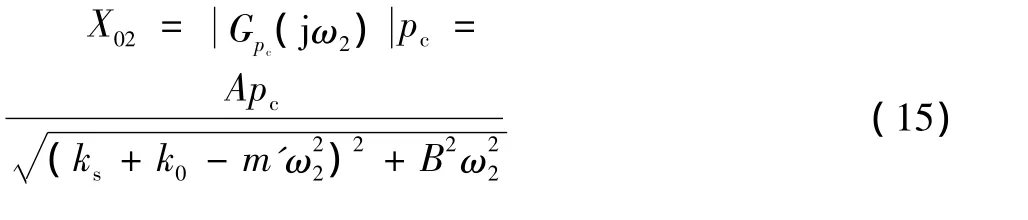
同理,pcsin(ω2t)作用下压电叠堆驱动器系统的幅值和相位角为

所有参数中,只有弹簧刚度k0和输入信号的频率ω为可变参数。分别分析系统的幅值和相位角与弹簧刚度和输入信号频率之间的关系,作出了振幅随弹簧刚度的变化曲线如图10所示,振幅随信号频率的变化曲线如图11所示,相位角随弹簧刚度的变化曲线如图12所示和相位角随信号频率的变化曲线如图13所示。

图10 振幅随弹簧刚度的变化曲线

图11 振幅随信号频率的变化曲线
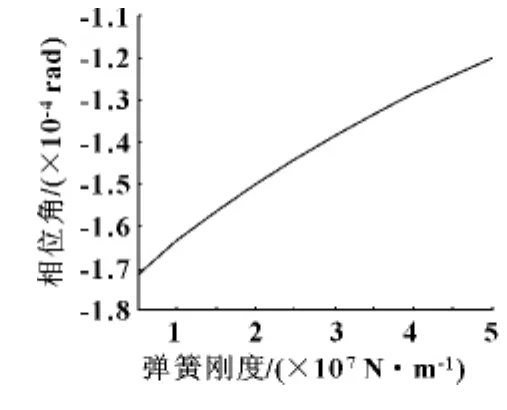
图12 相位角随弹簧刚度的变化曲线

图13 相位角随信号频 率的变化曲线
分析表明:振幅随弹簧的刚度增大而减小,所以在选择弹簧时,在满足能够提供足够的预紧力的前提下,应尽可能减小弹簧的刚度;振幅随信号频率的增大而增大,当信号频率逐渐接近系统有阻尼固有频率时,振幅将逐渐增大;相位角随弹簧刚度增大而减小,随信号频率的增大而增大。
4 结论
对压电型电液伺服阀的电气—机械转换器件——压电叠堆驱动器进行了动态特性研究。针对文中所讨论的压电型电液伺服阀结构,建立了压电叠堆驱动器的动态系统模型。根据该模型的传递函数对压电叠堆驱动器进行了时域分析,并分析了系统阻尼系数、系统等效质量、压电叠堆刚度等不同参数对压电叠堆驱动器动态特性和输出位移的影响。仿真结果表明:增大系统阻尼系数、减小系统等效质量和增大压电叠堆刚度可提高驱动器的动态特性和输出位移。
由于压电叠堆驱动器的振幅是影响压电型电液伺服阀输出流量的主要因素,文中分析了压电叠堆模型的频率响应,并绘制了系统的振幅和相位角与弹簧刚度和输入信号频率之间的关系曲线。研究结果为优化压电叠堆驱动器在电液伺服阀中的应用提供了一定的指导。
[1]GOLDFARB M,CELANOVIC N.A Lumped Parameter E-lectromechanical Model for Describing the Nonlinear Behavior of Piezoelectric Actuators[J].Journal of Dynamic Systems,Measurement,and Control,1997,119(3):478 -485.
[2]MITROVIC Milan,CARMAN Greg P,STRAUB Friedrich K.Response of Piezoelectric Stack Actuators under Combined Electro-mechanical Loading [J].International Journal of Solids and Structures,2001,38(24/25):4357 -4374.
[3]CALKINS Frederick T,DAPINO Marcelo J,FLATAU Alison B.Effect of Prestress on the Dynamic Performance of a Terfenol-D Transducer[C]//Proc SPIE 3041,Smart Structures and Materials,1997.
[4]郑凯,阎绍泽,温诗铸,等.预压力对压电叠层作动器性能的影响[J].压电与声光,2003,25(5):363 -365.
[5]杨叔子,杨克冲,吴波,等.机械工程控制基础[M].5版.武汉:华中科技大学出版社,2004.
[6]DAPINO Marcelo J,FLATAU Alison B,CALKINS Frederick T.Statistical Analysis of Terfenol-D Material Properties[J].Journal of Intelligent Material Systems and Structures,2006,17:587 -599.
[7]DAPINO Marcelo J,FLATAU Alison B,CALKINS Frederick T.Blocked Force and Free Displacement Characterization of PMN-32%PT Stacks[C]//Proc SPIE 6526,Behavior and Mechanics of Multifunctional and Composite Materials,2007.
[8]王秋婧.压电陶瓷驱动器力学模型理论与试验研究[D].沈阳:沈阳建筑大学,2011.
[9]LINDLER Jason E,ANDERSON Eric H.Piezoelectric Direct Drive Servo Valve[C]//Proc SPIE 4698,Industrial and Commercial Applications of Smart Structures Technologies,San Diego,USA,2002:488 -496.
[10]GUAN Changbin,JIAO Zongxia.A Piezoelectric Directdrive Servo Valve with a Novel Multi-body Contacting Spool-driving Mechanism:Design,Modeling and Experiment[J].Proceedings of the Institution of Mechanical Engineers,Part C:Journal of Mechanical Engineering Science,2014,228(1):169 -185.
