功率增强下的卫星导航星间信号辅助能力分析
2014-06-04肖志斌张鑫唐小妹王飞雪
肖志斌,张鑫,唐小妹,王飞雪
(国防科技大学 电子科学与工程学院,湖南 长沙,410073)
美国 GPS发展历程和国内卫星导航建设经验充分表明,卫星导航系统必将面临各种复杂的电磁干扰,导航战能力[1-5]直接影响到系统的生存能力,在导航战背景下,为提高导航系统抗干扰[6-7]能力,一般需要对下行信号进行功率增强。美国的下一代GPS计划——GPS III[1-3]正在稳步推进,GPSIIIC卫星拟进行M码功率增强[1]。按计划,GPSIIIC中功率增强的实施目标是在特定范围内播发比正常信号能量高约20 dB的军用M码信号。GPS IIIC功率增强技术使得每一颗卫星增加功率的花费约3 500万美元,包括大容量的电池,额外的天线和更大面积的太阳能帆板,且功率增强量越大,所需代价越大,增强卫星的选择与增强量的确定是费用与效能的一种折中考虑。孙进[8]对北斗系统功率增强量及覆盖范围进行了相关分析。关于功率卫星的选择,应该在保证功率增强所需达到的必要效能下,应尽可能减少功率增强卫星数。为提高功率增强效能同时尽可能减少成本,需要挖掘卫星间信号辅助的能力。本文作者设计了基于卫星间信号辅助的接收机实现结构,并在此基础上定量地分析了功率增强背景下卫星间的弱信号辅助能力,分析结果可指导功率增强卫星数的选择。卫星间的信号辅助属于一种卫星系统自辅助的手段,其本质上与其他各种外部辅助手段是一致的,目前主要的外部辅助手段主要包括无限局域网(WLAN)[9-10]、惯性导航系统辅助[11-12]、超宽带技术、辅助型GPS定位技术(assisted-GPS)[13]、无线通信网络[14-15]等,这些外部辅助手段都是通过压缩信号时间不确定度以及压缩动态来提高弱信号接收能力。本文作者设计卫星间辅助下的接收机结构主要是在载波相位跟踪环路中加入多普勒辅助量,进而压缩动态,提高跟踪环路的动态适应性。
1 卫星间辅助的基本原理
假设接收机接收到4颗以上功率增强卫星且实现了初始定位,此时可利用已接收的功率增强卫星估计被辅助卫星的多普勒,进而压缩被辅助卫星信号动态,辅助其捕获跟踪。当接收机接收的卫星数小于4颗时,由于接收机晶振的频率不确定度较大,多普勒估计误差较大,弱信号辅助能力较弱,这里不对这种情况进行分析。
接收机的跟踪门限主要取决于载波跟踪环路,卫星间的信号辅助主要表现为各个载波跟踪环路之间的辅助,具体的载波跟踪环路辅助结构如图1所示。由于信息处理模块定位测速频度要低于环路更新频度,若采用信息处理模块计算得到的多普勒辅助值加至环路中会导致环路更新时多普勒辅助值出现跳变,进而影响载波跟踪,因此跟踪阶段直接利用各个已跟踪通道的多普勒测量值并结合径向矢量、卫星径向速度直接估计出待接收信号的多普勒。
载波跟踪环路辅助结构只需要定位解算模块提供卫星径向速度、卫星与接收机的径向矢量即可,由于两者变化比较缓慢,因此对更新频度要求不高。下面分析被辅助通道多普勒辅助值的计算方法,假设已跟踪卫星数为N,卫星与接收机的相关参数定义见表1。H 与Ha的表达式如下:

图1 载波跟踪环路辅助结构Fig. 1 Assistance structure of carrier tracking loop
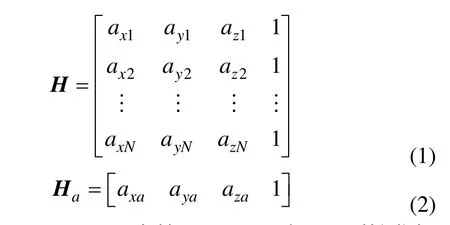
其中:ai=(axi,ayi,azi)为第 i颗已跟踪卫星到接收机的单位径向矢量;aa=(axa,aya,aza)为被辅助卫星到接收机的单位径向矢量。

表1 卫星与接收机的相关参数Table 1 Relevant parameters of satellite and receiver
假设信号载波频率为 fL,光速为 c,则接收机速度与已跟踪通道的多普勒测量值满足下述关系:

利用最小二乘可以得到接收机速度以及时钟漂移:

根据接收机速度、时钟漂移、被辅助卫星的径向速度以及被辅助卫星与接收机的径向矢量可以算得被辅助卫星的多普勒测量值为

将估计的多普勒辅助值 faid加至被辅助通道载波跟踪环路中,即可压缩信号动态,辅助其载波跟踪。被辅助通道载波相位跟踪环路类似于由 FLL辅助的PLL环路,只是其中的FLL为开环的频率锁定环路,高动态情况下,载波相位跟踪环路一般采用3阶环路,其结构如图2所示,多普勒计算模块计算的多普勒辅助值faid与本地载波频率相减得到频率误差信号,该信号通过FLL环路滤波器后加入到PLL环路,压缩PLL环路的输入动态,其中ω0f与ω0p分别为FLL与PLL的自然频率,两者与各自的环路带宽对应,t为环路更新时间间隔,即为积分时间。
2 卫星间信号辅助能力分析
2.1 卫星间多普勒辅助信息精度分析
被辅助卫星多普勒估计的计算公式如下:

卫星的径向速度估计误差一般要小于卫星速度的估计误差,根据星历计算的卫星速度精度一般为 0.1 m/s,根据历书计算的卫星速度精度一般为 0.3 m/s。已跟踪卫星可根据星历获取卫星速度,被辅助卫星可以根据历书获取卫星速度。故 vs与 va的估计方差分别为:

记 x=(HTH)-1HT(Fd-vsfL/c)=[x1,x2,x3,x4]T,x为 4×1 矢量,记 x的误差为 dx=[dx1,dx2,dx3,dx4]T,va的误差为dva,则被辅助卫星信号多普勒估计误差为

由于dx与dva相互独立,因此,卫星信号多普勒估计方差满足下式:

x的方差可以表示为

高动态条件下多普勒测量精度约为0.5 Hz,一般可以认为已跟踪卫星的多普勒测量精度要小于 0.5 Hz,故可以取Cov(Fd)=0.025IN×N,可以算得

图2 增加多普勒辅助信息后的载波相位跟踪环路Fig. 2 Carrier tracking loop with Doppler aid

矩阵(HTH)-1迹的平方根GDOP为SGDOP,则

联立式(10)和(13)可以得到多普勒辅助信息估计方差满足下式:

对于GPS L1C/A信号,fL=1 575.42 MHz,代入上式可以算得多普勒辅助精度为

2.2 卫星间辅助下的载波相位跟踪门限分析
卫星间辅助下的载波跟踪环路结构如图(2)所示,采用由2阶FLL环路辅助的3阶PLL环路, FLL环路的输入值为多普勒辅助值faid,其载波相位跟踪环路PLL的主要误差源包括PLL环路热噪声σtPLL、FLL环路输出的载波相位抖动σpFLL、振荡器颤动σv、阿伦偏差引起的振荡器颤动θA和动态应力误差θe,经验跟踪门限如下[10]:

其中,振荡器颤动σv可以忽略不计。阿伦偏差引起的振荡器颤动的表达式为

PLL环路热噪声主要与环路噪声带宽Bp、信号载噪比C/N0以及积分时间T相关,具体表达式为

FLL环路为开环的结构,其输出的频率误差 σs与输入噪声σfaid、环路噪声带宽Bf以及积分时间T相关,其表达式为

对应的载波相位标准差为

FLL环路基本可以消除PLL环路中由接收机运动引入的动态,因此其PLL环路的动态应力误差可以忽略不计。根据式(15)~(20),可以算得载波相位跟踪误差的表达式如下:
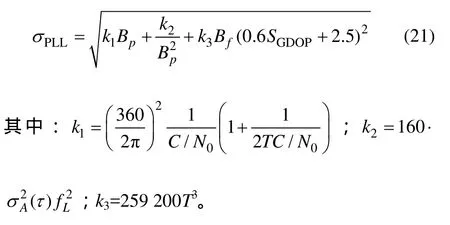
给定接收机动态R(t)、积分时间T以及已跟踪卫星的GDOP值后,对于不同的信号载噪比C/N0,采用数值解算的方法选择最优的PLL环路噪声带宽Bp_opt以及FLL环路噪声带宽Bf_opt使得PLL载波相位跟踪精度取得最小值σPLL_min(C/N0)。根据式(21)所示的载波相位跟踪门限经验公式可以得到当 σPLL_min( C/ N0)≤15°时,给定接收机动态R(t)、积分时间T以及已跟踪卫星的GDOP值的载波相位跟踪门限为

2.3 无辅助下的载波相位跟踪门限分析
无辅助情况下,同样采用由2阶FLL环路辅助的3阶PLL环路,环路跟踪性能由FLL与PLL环路共同决定。PLL环路的经验跟踪门限如式(16)所示,FLL环路的主要误差源包括:FLL热噪声σtFLL以及动态应力误差引入的频率颤动 fe,经验的 FLL跟踪门限为[10]:

FLL环路的频率误差σFLL表达式为

PLL环路的载波相位跟踪误差表达式如下所示:
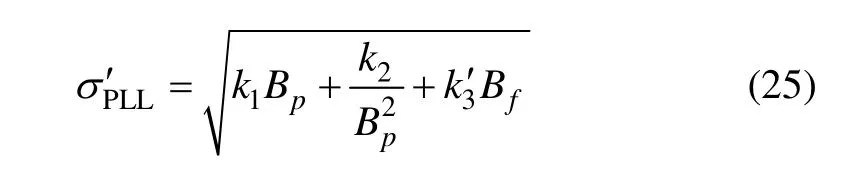
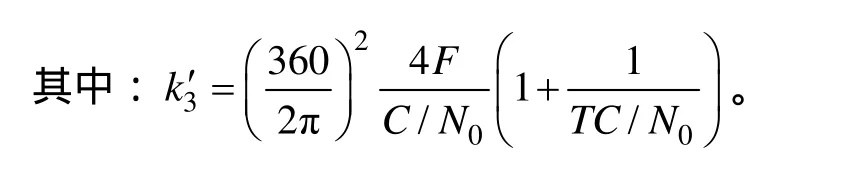
给定接收机动态R(t)、积分时间T以及已跟踪卫星的GDOP值后,对于某信号载噪比C/N0,采用数值分析的方法遍历搜索FLL环路噪声带宽Bf与PLL环路噪声带宽 Bp,若存在 Bf与 Bp使得 σFLL≤1/(12T)以及σPLL≤15°成立,则说明该载噪比要高于载波相位跟踪门限,反之则低于载波相位跟踪门限,这样对不同信号载噪比的情况进行分析可以得到载波相位跟踪门限值。
3 数值仿真分析
根据2.2节与2.3节的分析方法计算有无卫星间辅助时的载波相位跟踪门限,载波跟踪环路采用 2阶FLL环路辅助3阶PLL环路,其他条件如表2所示。
数值解算结果如图3和4所示。由图3和4可知:当已跟踪卫星GDOP为50或100时,卫星间辅助情况下载波跟踪门限为23~25 dB,比无辅助情况时的跟踪门限要低7~13 dB。显然经卫星间信号辅助后,接收机动态得到很大的压缩,在高动态情况下,载波相位跟踪门限降低至24 dB/Hz左右,跟踪能力得到较大提升。同时仿真结果也说明卫星间信号辅助对已跟踪卫星的GDOP值要求不高,已跟踪卫星的GDOP值对辅助能力影响不大。

表2 卫星与接收机的相关参数Table 2 Relevant parameters of satellite and receiver

图3 有无卫星间信号辅助下的载波相位跟踪门限Fig. 3 Carrier phase tracking thresholds with/without inter-satellite signal assistance
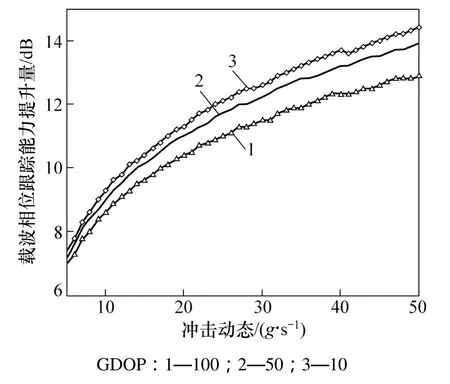
图4 卫星间信号辅助后载波相位跟踪能力提升量Fig. 4 Inter-satellite signal assisted enhancement of carrier phase tracking capacity
4 结论
(1) 当接收机接收到 4颗以上卫星并实现初始定位时,可以根据已跟踪卫星的信息以及定位信息辅助其他卫星信号的接收,且辅助能力较为可观,可以消除大部分的信号动态,在高动态条件下,载波相位跟踪门限下降至24 dB左右,相对于无辅助情况,被辅助卫星的载波相位跟踪门限降低7~13 dB。
(2) 分析结果可以指导功率增强卫星的选择策略:选择功率增强卫星时,只需要保证相关区域在全时段可以观测到4颗以上功率增强卫星即可,此时可以近似达到与全星座功率增强一样的性能。
[1] 干国强, 邱致和. 导航与定位-现代战争的北斗星[M]. 2版.北京: 国防工业出版社, 2000: 123-124.GAN Guoqiang, QIU Zhihe. Navigation and position: The compass in modern war[M]. 2nd ed. Beijing: National Defence Industrial Press, 2000: 123-124.
[2] 程立斌, 李珊珊. 透析伊拉克战争 GPS干扰与反干扰[J]. 电光与控制, 2004, 11(1): 18-21.CHENG Libin, LI Shanshan. Analysis of GPS jamming and counter-jamming technique in Iraq War[J]. Electronics Optics and Control, 2004, 11(1): 18-21.
[3] 孙智信. GPS导航系统的电子攻防对抗研究综述[J]. 航天电子对抗, 2001(1): 5-11.SUN Zhixin. The summarize of the electronic anti-jamming technology for GPS System[J]. Aerospace Electronic Warfare,2001(1): 5-11.
[4] 谭显裕. 导航战中 GPS的电子攻防对抗研究[J]. 航天电子对抗, 2001(1): 12-16.TAN Xianyu. The sdudy of GPS anti-jamming in navigation war[J]. Aerospace Electronic Warfare, 2001(1): 12-16.
[5] Pike J. GPS III/GPS Block III[EB/OL] [2011-12-30].http://www.globalsecurity.org/space/systems/gps_3.htm.
[6] Perz C M. GPS Modernization Update-Presentation at IEEE Plans[R]. Monterey: GPS Joint Program Office, 2004: 28.
[7] Fontana R, Latterman D. GPS Modernization and the future[C]//Proceedings of the IAIN World Congress and the 56th Annual Meeting of The Institute of Navigation. San Diego, CA:ION Publications, 2000: 222-231.
[8] 孙进. 导航卫星系统功率增强技术与覆盖范围研究[J]. 测绘学报, 2011, 40(5): 80-84.SUN Jin. Research on power-enhanced technology and coverage areas of global navigation satellites[J]. Act Geodaeticaet Cartographica Sinica, 2011, 40(5): 80-84.
[9] Progri I F, Michalson W R, Wang J, et al. Indoor geolocation using FCDMA pseudolites: Signal structure and performance analysis[J]. Navigation J Inst Nav, 2007, 54(3): 242-256.
[10] Progri I F. Wireless-enabled GPS indoor geolocation system[C]//Proceedings of Position Location and Navigation Symposium.CA, 2010: 526-538.
[11] Mohinder. Global positioning systems, inertial navigation, and integration[M]. 2nd ed. New York: Wiley-Interscience, 2001:34-35.
[12] Ohlmeyer E J. Analysis of an ultra-tightly coupled GPS/INS system in jamming[C]//Proceedings of Position Location and Navigation Symposium. San Diego, CA: ION Publications, 2006:44-53.
[13] Frank V D. A-GPS: Assisted GPS, GNSS and SBAS[M].London: Artech House, 2009: 100-102.
[14] Etienne F. Integration of a GSM receiver with GPS for integrated navigation or for quick satellite signal acquisition[C]//Proceedings of ION GNSS. Long Beach, CA: ION publications,2005: 1425-1432.
[15] Kaplan E D, Understanding GPS: Principles and applications[M].Norwood: Artech House, 2005: 233-234.
