南极科考支撑装置电源系统控制策略
2014-06-01魏海坤方仕雄张侃健朱蔚萍
葛 健 魏海坤 方仕雄 张侃健 朱蔚萍
(东南大学自动化学院1,江苏 南京 210096;东南大学空间科学与技术研究院2,江苏 南京 210096)
0 引言
Dome A是南极冰盖的最高点,已经被证实为地球上最佳的天文观测地区之一,具有极为重要的科学价值[1-3]。我国于2008年在Dome A建立了一个自动天文观测平台,即 PLATO 平台[4-6],其控制中心位于澳大利亚。这种状况导致了我国不能在第一时间获取天文观测数据,为了改变这种局面,东南大学开发了第一代南极科考支撑装置。
PLATO平台是完全手动控制的,而科考支撑装置是完全自主运行的。装置无人值守,可靠性至关重要,所以硬件设备和软件设计都以保障高可靠性为重心。本文重点阐述了装置中发电机组所采用的软件控制策略。该策略采用了循环队列的方式,控制较为灵活方便。西藏高原大量的测试以及在Dome A地区的现场运行表明了该控制策略具有良好的效果。
1 发电模块硬件设备
科考支撑装置采用模块化设计,分为发电模块、控制模块和通信存储模块。发电模块为整个装置和天文观测仪器设备提供电力支持;控制模块完成现场自动控制和远程控制[7-8];通信存储模块提供本地数据存储和国内监控中心的远程通信[9]。
发电模块位于发电舱内,舱内有6台德国HATZ 1B40发电机,分为A、B两组,并为它们分别编号,A组发电机编号为1~3,B组发电机编号为4~6。发电舱为上下两层,下层为储油箱,上层安装了发电机组以及各种辅助设备。发电机有3个输入信号和1个输出信号,输入信号为预热信号、油门信号以及启动信号,输出信号为润滑油液位报警信号。机组重要辅件有超级电容、润滑油箱以及油泵。
2 发电机组控制策略
发电机组的控制主要包括以下几个方面:超级电容组控制、润滑油泵控制、发电机运行控制。
2.1 超级电容组
超级电容的作用是提供发电机启动过程中所需要的电能,充满电时,其电压为12 V左右,电压值的大小关系到发电机能否正常启动。超级电容电压值变化如表1所示,单个超级电容可以连续提供5次发电机启动所需的电能,测试条件为预热信号为1 s,启动信号为5 s,温度为25℃。大量试验表明,当电压值低于9 V时,则无法成功启动发电机;超级电容电压值越高,发电机启动越顺利。
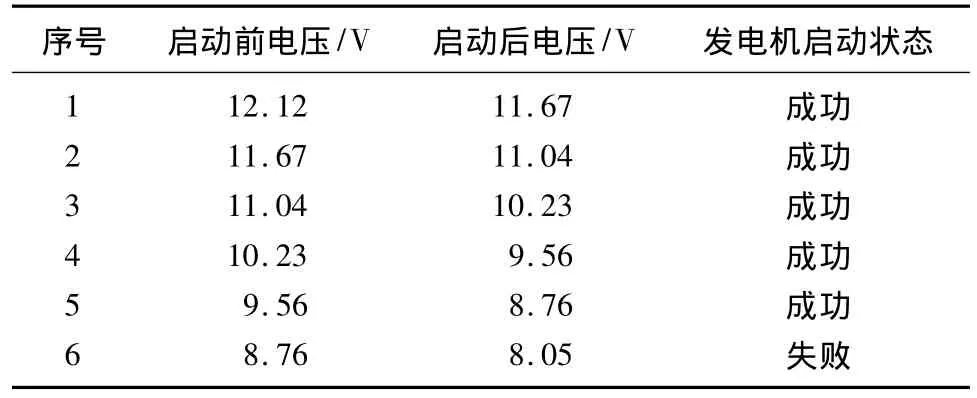
表1 超级电容电压值变化表Tab.1 Variation of the voltage of the super capacitor
在现场情况下,启动过程中预热时间和启动时间均会发生改变,而且发电机很可能需要多次启动,一个超级电容无法满足发电机启动所需的电能,故采用2个超级电容并联的方式。这在一定程度上改善了超级电容可能出现的电量不足的状况,更重要的是超级电容组采用了不间断充电的方式,极大地保障了超级电容的可靠运行。
超级电容组采用了2种不间断充电方式,具体为:若发电机未工作,则由蓄电池通过低压母线给超级电容充电,在电容低压充电过程中,应尽量避免启动发电机;若发电机工作,则由发电机通过高压母线直接给超级电容充电,并实时检测超级电容的电压值,发电机在运行过程中一旦出现超级电容电压低于9 V的情况,立刻打开低压、高压充电开关,发电机和蓄电池迅速给超级电容补充电能。
2.2 润滑油泵
发电机的运行离不开润滑油,若润滑油长时间得不到更换,润滑效果会下降,将影响发电机的使用寿命。然而,科考人员每年只能对平台维护一次,润滑油只可能在此期间得到更换。为了解决这一问题,在发电舱内配备了润滑油箱,一次性添加了足量的润滑油,并且改装了发电机自身的润滑油箱,安装了回流装置,通过油泵将机身内的润滑油和外部油箱的润滑油形成循环。
润滑油泵的控制参数主要有油泵运行的频率、运行时间和间隔时间,其中间隔时间和运行时间可以远程人工修改。这样,即使油泵本身的参数发生改变,通过远程修改间隔时间和运行时间,油泵仍然可以受控。2010年7~9月,南极科考支撑装置在西藏羊八井国际宇宙射线观测站进行了高原发电机测试,通过大量试验,获得了每个发电机的润滑油泵最优控制参数。试验测得各个编号的润滑油泵最优参数如表2所示。

表2 润滑油泵运行参数表Tab.2 The operating parameters of lubricating oil pumps
2.3 发电机启动
发电机的启动流程图如图1所示。
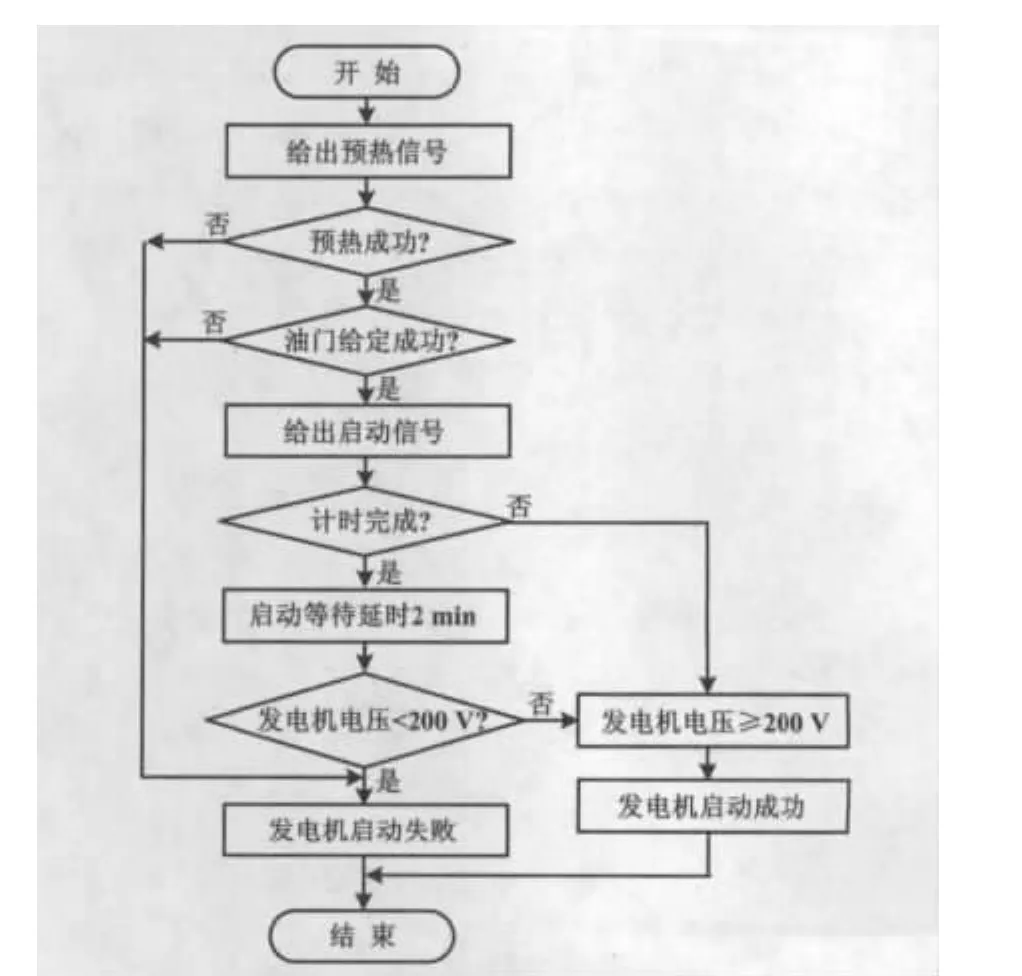
图1 发电机启动过程流程图Fig.1 The flowchart of the generator startup process
发电机的启动逻辑比较简单,分为以下3个步骤:①给出预热信号,作用是加热气缸,温度升高,便于点火;②打开油门,向气缸内送燃油;③给出启动信号,并等待2 min,在2 min内,若发电机的即时输出电压大于200 V,即认为发电机已经启动成功。这里涉及到预热时间和启动时间两个参数。大量试验得到的预热时间、启动时间与环境温度的匹配表如表3所示。对于预热时间来说,越长越好,但是消耗超级电容的电量就越多。表3中的数据是最小值,若相关参数低于该值,则发电机启动失败的可能性将增加。启动时间过短,电机转速低,造成启动失败;启动时间过长,也会损坏发电机的启动电机,造成发电机启动瘫痪。所以控制程序一旦检测到发电机输出电压大于200 V,需要立刻切断启动信号。
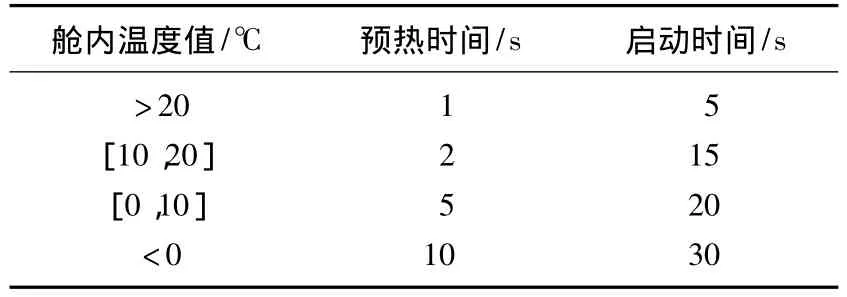
表3 温度与启动参数匹配表Tab.3 The matching table between temperature and the startup parameters
2.4 发电机的运行控制
南极科考支撑装置在Dome A地区运行需要发电机提供持续稳定的电能。发电机的运行控制面临以下几个难点:①发电机的数量较多,需要合理地调度,尽可能使每一台发电机都发挥最大的作用;②发电机发生故障时,能够做到及时可靠地切换,不影响平台的正常运行;③有可能出现误报警,频繁切换发电机;④必要时可以人工远程干预,恢复正常后,系统能够再次进入自主控制。
为了解决这些难点,本文提出了发电机启动循环队列的方案。该方案将每个发电机的编号组成一个循环队列。当控制程序运行时,首先检查循环队列,取循环队列首位的数值为当前需要启动的发电机对应编号。通过修改循环队列,可以实现对发电机组的调度;当检测到发电机故障时,将故障发电机的编号迅速调整到队列末端,程序自动启动队列首端编号对应的待命发电机。极端情况下,若有发电机出现了硬件上的损坏,即不可恢复的故障,只需在循环队列中用0来屏蔽该发电机的编号即可,该发电机就不会再被启动。通过屏蔽可以解决发电机频繁切换的问题,同时循环队列可以人工远程修改,调整发电机组的运行顺序,状态好的发电机排在队列靠前的位置,使机组始终处于最优运行状态。
为了应对在Dome A可能出现的无法预料的状况,增强系统的可靠性,主控系统准备了以下两套控制方案。
①方案一
采用发电机故障切换控制加定时巡检控制。发电机故障切换控制作用是:一旦检测到发电机发生故障,立即调整循环队列[10-12],然后切断当前故障发电机的油门以及母线开关等,根据新的队列启动待命的发电机。例如:若循环队列初始为123456,控制程序先启动编号为1的发电机,当检测到1号发电机故障后,循环队列变更为234561,随后启动编号为2的发电机;若2号发电机启动失败,视为2号发电机故障,继续启动下一台发电机,直至成功启动某一台发电机为止。在这个过程中,天文观测的设备仪器会因为掉电而关闭,控制程序需记忆所有设备仪器在断电前一时刻的工作状态。当发电机重新启动成功后,再将设备重新上电,恢复到故障前的状态。
在南极现场只有一台发电机在运行,其余的发电机处于等待状态,有可能出现处于待命状态的发电机长时间得不到运行,再次启动较为困难,因此需要给发电机定时巡检热机,以便保持良好的状态。巡检控制的要求是不能影响当前工作的发电机,且在巡检过程中,若当前工作的发电机发生故障需要运行故障切换程序时,则停止巡检程序,优先运行发电机的故障切换程序。主控程序设定的巡检时间是10天,巡检程序的逻辑为:首先获得当前正在运行的发电机编号,在该编号的基础上加1,即为将要巡检的首台发电机号;然后调用发电机启动程序,运行5 min后,自动关闭,巡检发电机号再加1,继续巡检;当巡检发电机号大于6时,将其复位为1,直至巡检发电机号重新等于当前运行的发电机编号,完成一个循环,视为巡检结束。
②方案二
采用定时切换发电机的方法是指发电机运行了一段时间后将其关闭,自动切换为下一台待命的发电机。该方法让每台发电机均能在一段时间后投入运行,有利于延长发电机的寿命。发电机的定时切换区别于故障切换,不同之处在于:故障切换说明是当前正在运行的发电机失去工作能力,科考仪器设备被切断用电,整个系统面临停机的威胁,需要在备用电源的支撑下启动下一台发电机;而定时切换则不然,它是在当前发电机正常运行的情况下切换到下一台发电机运行,其切换需要做到无扰切换,即保证对系统无任何影响,科考仪器设备正常工作。简而言之,即在成功启动了下一台发电机的情况下,才能进行定时切换。
切换过程如下:首先检测到发电机运行时间满足切换条件,这时不能立刻关闭当前正在运行的发电机,而是调整循环队列,启动下一台待命的发电机,等待发电机启动成功并且接入高压母线后,方可关闭前一台发电机。极端情况下,如果出现待命的5台发电机均无法启动成功的状况,则该次切换取消。
科考支撑装置在西藏羊八井做了大量试验,确定了发电机组的各项控制参数。2010年9月13日~18日,三号发电机在羊八井测试运行的电压图如图2所示。测试表明,三号发电机运行和切换都正常。
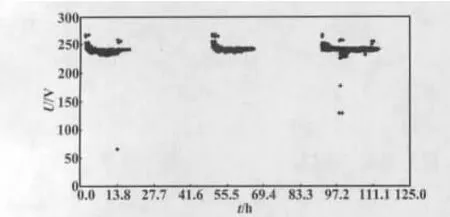
图2 三号发电机西藏高原运行电压图Fig.2 Operating voltage of unit 3 generator at Tibetan plateau
3 运行结果与结论
科考支撑平台于2011年1月在南极Dome A[8]成功运行,结合现场调试和运行的情况,控制方案采用了故障切换加定时切换。截取的三号发电机组的电压值如图3所示。
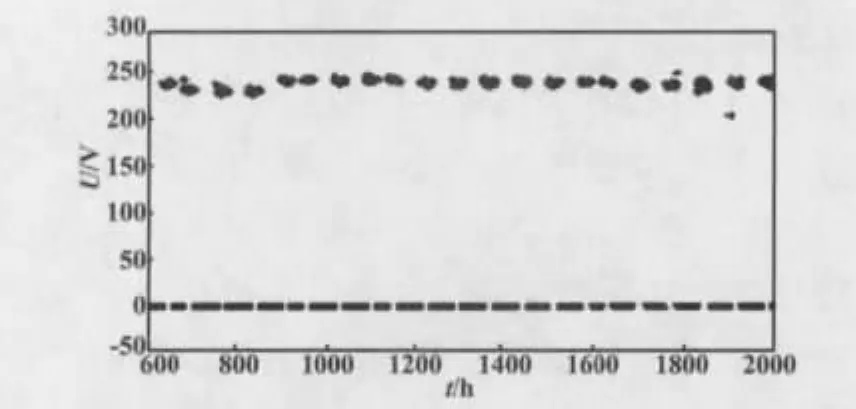
图3 三号发电机Dome A运行电压图Fig.3 Operating voltage of unit 3 generator at Dome A region
从图3可以看出,三号发电机的电压值稳定,在正常工作一段时间后能够自动切换到其他发电机运行,也能够再次重新启动运行。
主控系统实现了对发电机组的控制,说明了其控制策略是有效的。然而,由于时间仓促以及受环境条件的约束,支撑平台依然还存在着不少问题,如润滑油液位的平衡以及发电机的低温启动难等问题,这些都是需要改进的地方。
4 结束语
本文介绍的控制策略采用循环队列的方式,实现了对电源模块发电机组的有效控制,完成了对整个装置的能源供应。南极科考支撑装置的成功搭建,为我国在南极地区展开更为广泛的天文研究提供了舞台,借此提高我国极地天文观测的能力;同时,它也为天文科考观测平台的改进提供了宝贵的经验,并为在高原严寒等恶劣条件下无人值守控制系统的设计提供了借鉴意义。
[1]Sims G,Ashley M,Cui X Q,et al.Precipitable water vapor above Dome A,Antarctica,determined from diffuse optical sky spectra[J].Publications of the Astronomical Society of the Pacific,2012,124(911):74-83.
[2]Wang L,Lucas M,Krisciunas K,et al.Photometry of variable stars from Dome A[J].The Astronomical Journal,2011,142(5):155.
[3]Zhou X,Fan Z,Jiang Z J,et al.The first release of the CSTAR point source catalog from Dome A,Antarctica[J].The Publications of the Astronomical Society of the Pacific,2010,122(889):347 -353.
[4]Lawrence J S,Ashley M C,Hengst S,et al.The plato dome a sitetesting observatory:power generation and control systems[J].Review of Scientific Instruments,2009,80(6):1 -10.
[5]Luong D M,Ashley M C,Everett J R,et al.Plato control and robotics[C]//Proceedings of SPIE-the International Society for Optical Engineering,2008.
[6]Luong D M,Ashley M C,Cui X Q,et al.Performance of the autonomous plato antarctic observatory over two full years[C]//Proceedings of SPIE International Society for Optical Engineering,2010.
[7]王慧慧,张侃健.基于1756Eweb模块的罗克韦尔PLC和计算机通信实现[J].工业控制计算机,2011(2):9 -10.
[8]谢尉卿,葛健,方仕雄,等,南极科考支撑平台主控系统的硬件设计与实现[J].电气自动化,2012,34(1):61 -63.
[9]汤刘杰,朱蔚萍,张侃健.南极科考智能支撑平台监控系统的设计与实现[J].电气自动化,2012(1):43-45.
[10]张锦程.网络化过程控制实验平台的远程控制研究与实现[D].南京:东南大学,2010.
[11]严蔚敏,吴伟民.数据结构(C语言版)[M].北京:清华大学出版社,1999.
[12]徐凯.循环队列数据结构在微控制器系统中的设计与实现[J].计算机测量与控制,2002(10):659-660.
[13]翁卓,熊承义,李丹婷.基于光电传感器的智能车控制系统设计[J].计算机测量与控制,2010,18(8):1789-1791.
