一线总线器件异步读写实现方法
2014-06-01于志豪肖林京张瑞雪槐瑞托
于志豪 常 龙 肖林京 张瑞雪 槐瑞托
(山东科技大学机械电子工程学院1,山东 青岛 266590;山东科技大学信息与电气工程学院2,山东 青岛 266590)
0 引言
一线总线技术将地址线、数据线、控制线、电源线合为一根信号线,这根信号线上允许挂数百个使用一线总线技术的测控对象,较大规模地减少了测控设备的引线数量[1]。一线总线结构的数字式温度传感器以其检测精度高、抗干扰力强、硬件结构简单等诸多优点得以广泛应用[2-3]。
在基于MCU的一线总线驱动程序设计中,因一线总线器件的时序要求相对严格,大多采用CPU延时等待的方法来实现精确延时[4-5]。这种延时属于典型的同步程序风格。在整个一线总线操作期间,CPU延时等待方法直接导致了CPU大量消耗于总线时序的处理而无法顾及其他工作[6-7]。
本文以Arm-Cortex芯片作为一线总线器件的主控器,通过一个定时器的四个中断实现一线总线器件的读写时序。将一线总线单个数据位读写过程中的四个关键时间点作为MCU系统的中断点,在中断程序中由CPU完成总线状态位的修改,从而实现一线总线数据位的读写。该方法充分发挥了MCU系统外设的工作能力。在定时器的协助下,以极低的CPU占用率实现了一线总线的异步读写。
1 一线总线读写时序
18B20是工业现场广泛采用的数字式温度传感器。该器件采用了一线总线技术,可以大规模地减少多点温度测量系统中测温传感器的引线数量。
使用基于一线总线结构的数字式温度传感器DS18B20测量温度,特别是在多点测量领域,必须首先确定总线上所有器件的64位的序列号[8]。典型的温度读取方法是通过搜索算法,查找出所有总线上的器件的64位ID号,并固化于MCU内。在温度读取过程中,一线总线控制器先向总线上所有器件下发温度转化指令,然后控制器通过指令逐个锁定总线器件,并读取各个传感器的温度数据[9]。
准确完成单只18B20的温度读取应经过如下几步操作:①主机发送复位指令;②主机发送MachRom指令;③主机发送64位ID号;④主机发送温度转化指令;⑤延时500 ms以上;⑥主机发送复位指令;⑦主机发送MachRom指令;⑧主机发送64位ID号;⑨主机发送读取温度指令;⑩主机读取温度。
如果总线上存在多个18B20,则上述工作可简化为:①主机发送复位指令;②主机发送SkipRom指令;③主机发温度转化指令;④延时500 ms以上;⑤主机发送复位指令;⑥主机发送MachRomN指令;⑦主机发送64位ID号;⑧主机发送读取温度指令;⑨主机读取温度N,直到总线上所有器件温度读取完成[9]。
一线总线主机读0时序如图1所示。
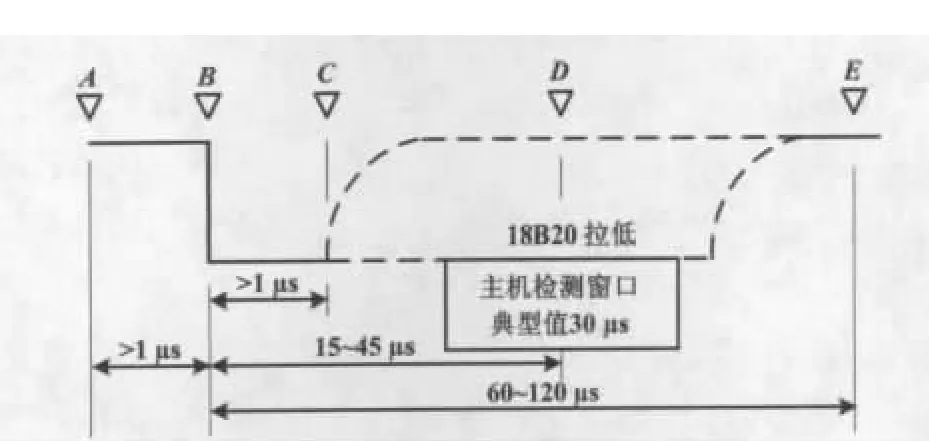
图1 一线总线主机读0时序Fig.1 Time sequence of read“0”in host computer
总线完成上述操作所需时间为:2.6+500+(1+96×0.1)N ms。取N=100可知,当总线上存在100只18B20时,完成一次总线温度读取用时应不小于1562.6 ms。无论采用何种算法,该时间消耗是确定的,若要想全部读取总线上的100只器件的温度值,用时必须大于1562.6 ms。对于基于MCU的测控制系统来说,如果全部使用空指令实现这些延时,将会对CPU资源产生极大消耗并最终导致MCU无法完成其他任务。
2 一线总线异步读写方法
2.1 时序分析
以一线总线主机从总线读取一位数据为例,其时序示意图如图2所示。
由图2可以看出,从A点开始主机释放总线,总线电平被上拉电阻自然拉至高电平。间隔1 μs后,从B点开始主机拉低总线并持续大于1 μs的时间,到C点主机释放总线。此后一线总线设备响应总线时序向总线写入0或1,主机会在由B点开始后的15~45 μs的时间窗口内读取总线上的数据,并认为从B点开始后60 μs以后的E点为主机完成总线数据的读取。主机读取并存储当前数据位后进入下一位数据位的读取。
上述工作(主机读取一位数据)如交由MCU处理,可简要描述如下:A点,计时开始;B点拉低总线;C点,释放总线;D点,读取总线数据;E点,标记当前位读取完成。
该工作的简要描绘如表1所示。表1同时也给出了主机向总线写0或写1的操作时序。由表1可见,一线总线的读写过程中主机的操作内容略有不同,但时序有很强的共性。完成总线数据读取只需MCU在B、C、D、E四个时间点上对总线进行相应操作即可,且各个关键时间点上的MCU工作极其简单,完全可以放在中断程序中直接实现,且不会对其他程序的运行产生明显影响。
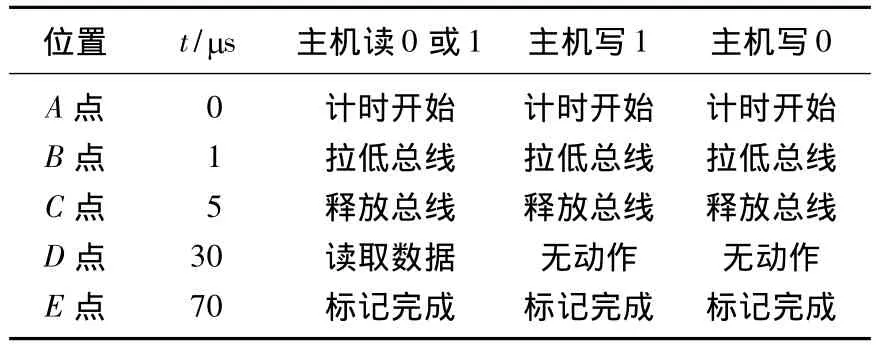
表1 主机读写总线时序与CPU的主要工作Tab.1 Main tasks of CPU in the time sequence of bus read/write in host computer
总线的复位操作时序要求与总线读0操作过程非常相似,不同之处仅在于操作时间较长。
总线复位的主要时序与主机应完成的工作如图3和表2所示。
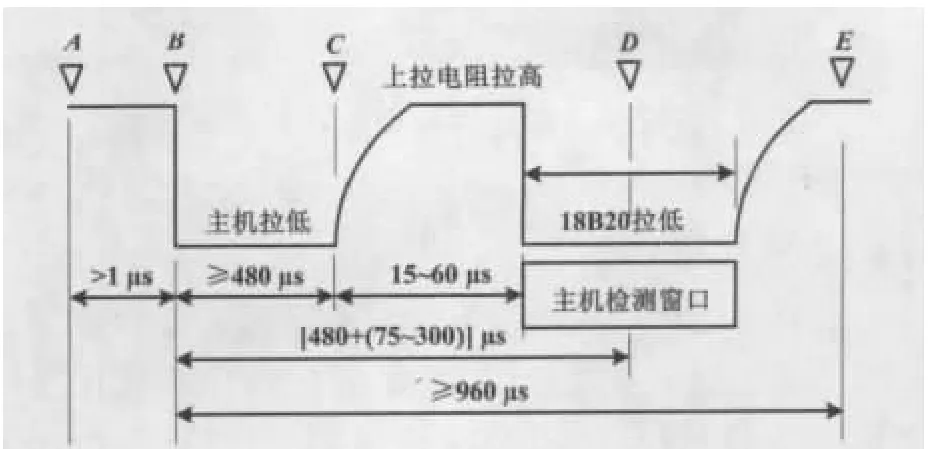
图3 主机复位时序图Fig.3 The reset time sequence of host computer
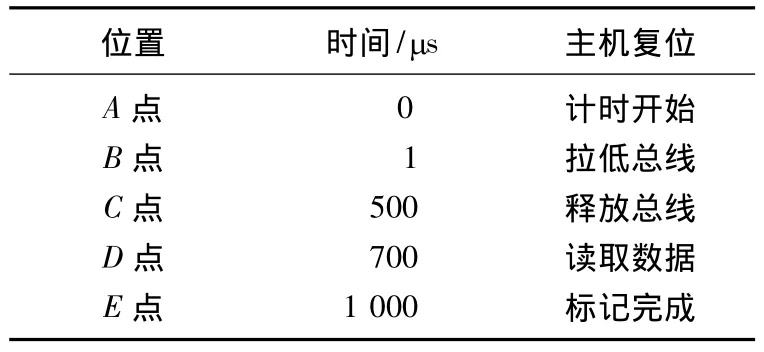
表2 主机复位时序与CPU的主要工作Tab.2 Main tasks of CPU in reset time sequence of host computer
2.2 异步读写实现
由上述分析可知,无论是复位或是总线读写,均可以将总线操作化成四个关键时间点的CPU动作,且每个时间点上的工作都极为简单,可以在中断程序中直接实现。
本文以ST公司的Arm-Cortex芯片STM32F103RCT6为例,实现上述一线总线的操作方法。
STM32F103RCT6提供了两个高级控制定时器,每个高级控制定时器提供了四个独立的输出比较通道,每个输出比较通道均可以产生中断。
表1、表2所示的主要时序可以通过如图4所示的高级定时器的四个输出比较通道实现。以表1所示的主机读取一个总线数据位为例。程序初始化时将定时器时钟的时基配置为1 μs,即计数器的时间与以微秒为单位的计时同步。A点,程序将四个输出比较通道输出比较寄存器值预设为1、5、30、70(与表1中的B、C、D、E四个时间点对应),计数器清0后开启各中断,启动定时器。随后即会顺次发生图4所示的B、C、D、E四个时间点所对应的中断,在每个中断的中断程序中完成表1所示的对应工作即可。
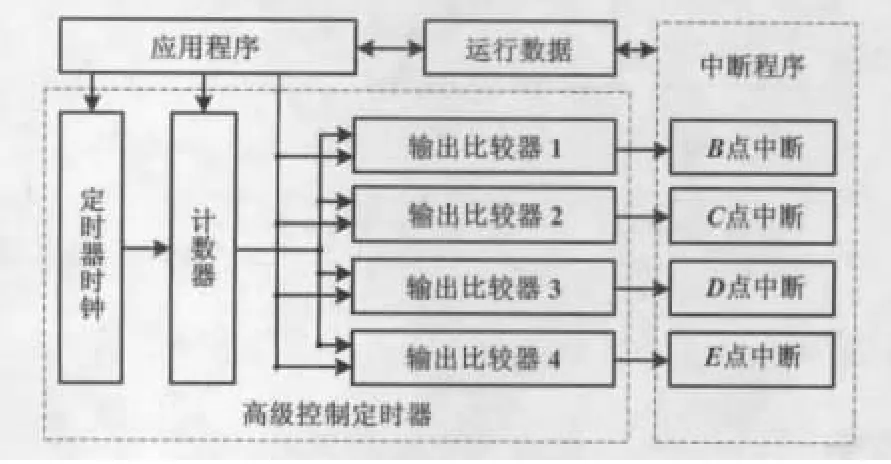
图4 高级控制定时器的四个输出比较通道Fig.4 Four comparison channels of the advanced control timer
2.3 总线数据处理
上节所述的一线总线异步数据读定方法仅读写了一线总线上的一个数据位,实际的一线总线操作多以字节(8个数据位)为一个操作单元,只有复位操作可以认为是一个数据位的操作。一线总线操作的典型数据如表3所示。

表3 一线总线操作的典型数据Tab.3 Typical data of 1-Wire bus operation
表3中,复位操作和搜索操作可以按读写1位总线数据位的形式以2.2节所讨论的方法实现。总线指令和读取数据两种操作是以连续读写8个数据位(1字节)的形式进行的。总结表3所有可能会出现的一线总线操作数据类型,可给出如下数据结构。
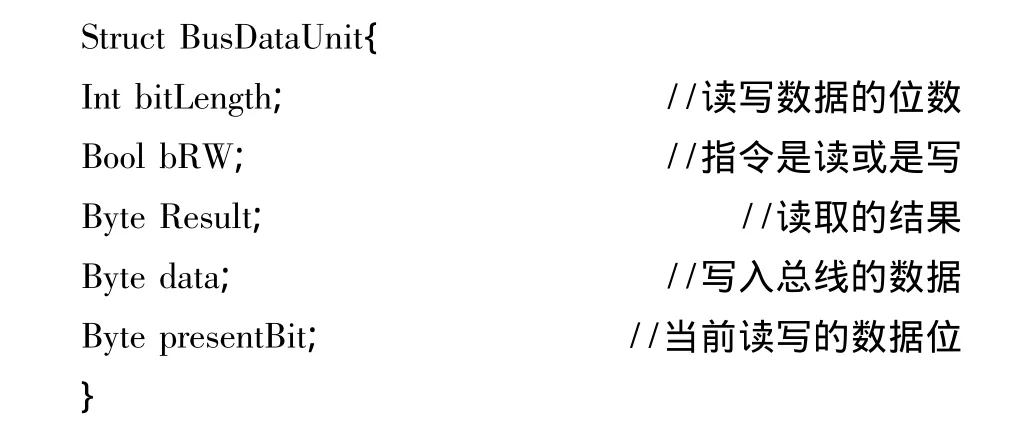
无论是复位,还是总线指令读写都可用上述数据结构的形式进行表达。例如,主机读取总线上的某一传感器的温度转化数据,其操作应包含如下顺序执行的5个步骤:①主机发送复位指令;②主机发送MachRom指令;③主机发送64位ID号;④主机发送读取温度指令;⑤主机读取16位温度。
这5步操作中,64位的ID号和16位的温度数据会因传感器的不同而变化,其他操作中的数据相对固定。将这5步操作以BusDataUnit的形式进行表达,并以指令队列的形式进行存储,得到的指令队例如图5所示。此后用户程序可将该指令队列交由定时器中断程序进行解析,当指令队列中的所有指令执行完成后,定时器中断程序产生完成标记,CPU控制程序发现指令队列完成标记后,对数据进行进一步处理。
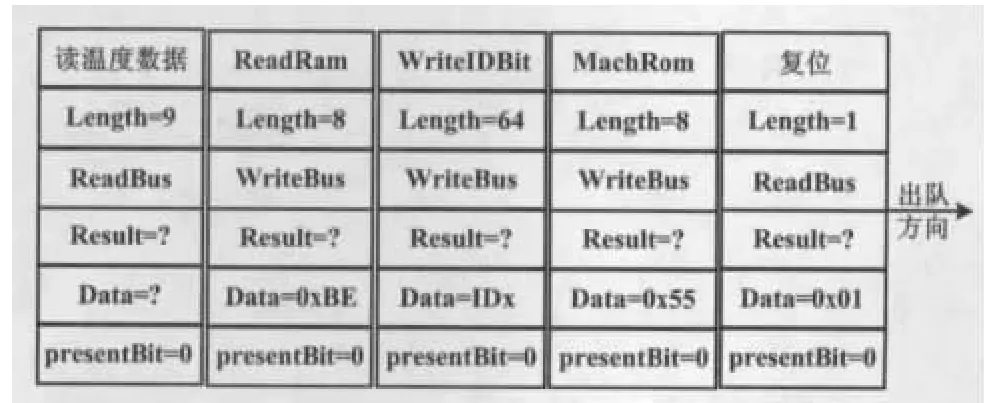
图5 读某一传感器温度值的指令队列Fig.5 The instruction queue of reading one temperature value of sensor
指令队列为异步处理流程如图6所示。主程序完成的主要工作是指令队列的生成,主程序按总线操作要求生成指令队列后即返回。中断处理程序在中断程序中顺序实现了指令队列中各个数据位的读写。当指令队列完成后,中断程序会产生一个完成标记,主程序在收到该完成标记后认为总线读写完成。
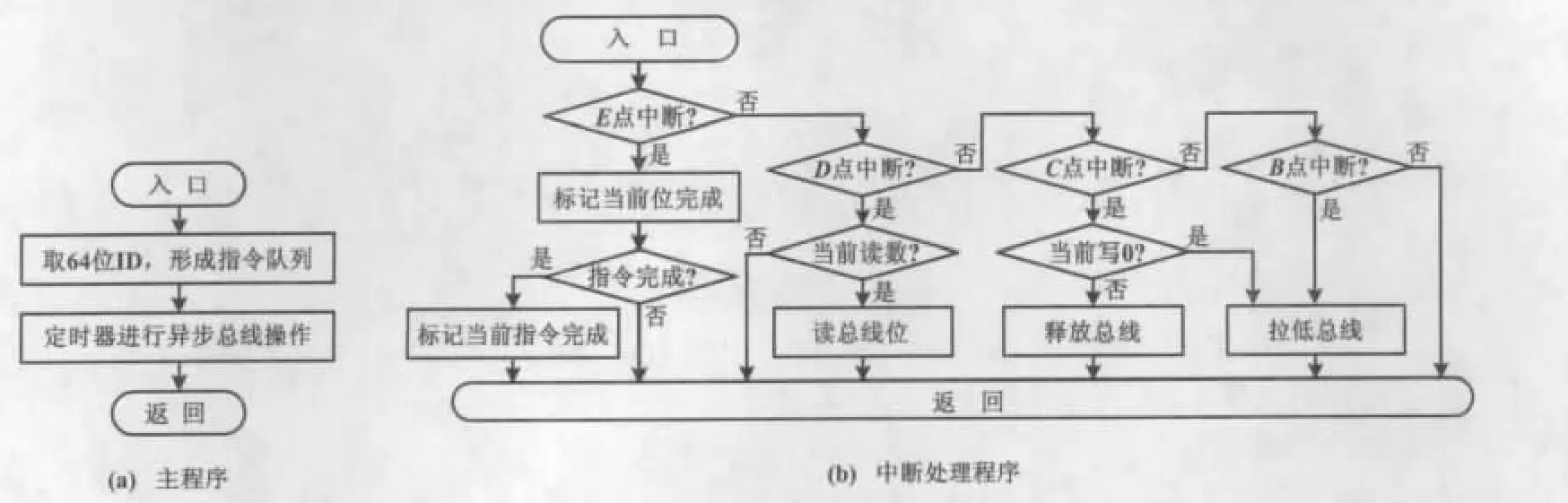
图6 指令队列的异步处理流程Fig.6 Asynchronous processing of instruction queue
3 试验过程
试验系统采用了ST公司的 Arm-Cortex芯片STM32F103RCT6作为一线总线的主机[10],MCU 主频为72 MHz。一线总线采用了三线制(地线、电源线、数据线),总线上接入了100只温度传感器DS18B20。总线的读写用STM32F103RCT6的I/O口直接驱动。一线总线的控制程序采用Keil RealView-Arm MDK开发。
试验测试了主机从一线总线上完整读取100只18B20的温度所对应的时间消耗。为准确获取一线总线操作所占用的CPU时间,主机以 Arm-Cortex的SysTick定时器作为系统运行计时器。主程序及中断程序的入口和出口点记录SysTick的当前值作为相关程序对CPU时间占用的依据。主要的时间消耗如表4所示。

表4 异步数据读取时间Tab.4 Time cost for reading asynchronous data
表4中,总线复位与指令下达包括的主机操作包括了总线复位、主机发SkipRom指令和主机发温度转化指令三种顺序执行的主要操作。主机读取器件数据包括的主机操作包括了主机发送复位指令、主机发MachRom指令、主机发64位ID号、主机发读取温度指令和主机读取温度5种顺序执行的主要操作。另外,表4所给出的数据未能将SysTick中断程序对CPU消耗计算在内,所得出的数据较之于实际数据偏大。由表4可见,一线总线完成100只18B20温度转化及数据读取用时约1.6 s。采用异步数据读写程序,上述工作对CPU的时间占用仅8.26 ms,CPU的占用率不到0.6%。
4 结束语
本文以MCU作为一线总线主机,实现了一线总线器件异步读写方法。在分析了一线总线主要工作时序共性的基础上,给出了实现一线总线时序的基本程序结构,进而形成了一线总线的异步数据读写算法,并给出了主要的程序实现思路。以STM32F103RCT6作为一线主机,实现了一线总线的异步数据读写方法。试验数据表明,该方法可有效降低一线总线读写操作对CPU的占用率,提高MCU控制系统的实时性。
[1]李敏,汪春,孟臣.数字化粮情检测智能温湿度传感器[J].农业机械学报,2005,36(4):99 -102.
[2]姜幼卿,左国华,陈勤学,等.基于CAN总线的温室自动控制系统的通信设计[J].仪表技术与传感器,2005(4).
[3]陈汉臻,王爱美,罗进文,等.CC2430芯片和单片机的暖气控制系统设计与实现[J].自动化仪表,2012,33(9):17 -20.
[4]Huang W L,He L L.Study on timing sequences of interface program of digital temperature sensor DS18B20[J].Lecture Notes in Electrical Engineering,2012,13(8):1329 -1334.
[5]张晓玲,梁炜,于海斌,等.无线传感器网络传输调度方法综述[J].通信学报,2012,33(5):143 -157.
[6]魏学哲,戴海峰,孙泽昌.汽车嵌入式系统开发方法、体系架构和流程[J].同济大学学报:自然科学版,2012,40(7):1064 -1070.
[7]刘啸滨,郭兵,沈艳,等.基于ARM处理器的嵌入式软件能耗统计模型[J].电子科技大学学报:工学版,2012,41(5):770 -774.
[8]鲁正林,陈一飞,孙倩,等.1-wire技术在温室集成控制系统中的应用[J].农业机械学报,2009,40(S1):119 -222.
[9]陈良光.DS18X20在多点温度检测中的地址码设计及其在线纠错[J].传感技术学报,2005,18(3):157 -161.
[10]黄家才,李宏胜,郭婧.嵌入式油田无线远程监控系统的研究和设计[J].自动化仪表,2011,32(11):46 -48.
