基于气动肌肉和负刚度机构的主、被动宽频隔振研究
2014-05-17刘延斌韩秀英马佳佳尹晨旭
刘延斌,韩秀英,马佳佳,尹晨旭
(河南科技大学机电工程学院,河南洛阳 471003)
基于气动肌肉和负刚度机构的主、被动宽频隔振研究
刘延斌,韩秀英,马佳佳,尹晨旭
(河南科技大学机电工程学院,河南洛阳 471003)
为实现简单、可靠、低耗、高效的微振动宽频隔振,基于气动肌肉和负刚度机构构建了一种新型隔振系统,对其主、被动控制进行了研究。首先建立系统的动力学模型,在此基础上分析了系统的准零刚度特性,分别运用近似解析方法和数值方法对系统的振动传递率、振动响应以及非线性现象进行分析。然后结合反演控制设计方法、自适应以及滑模控制技术,制定了系统的低频主动控制策略,运用数值方法对主动控制下的隔振性能进行了分析。结果表明,该系统拓宽了被动控制的低频隔振频带,对5mm以下幅值的激励,隔振频率可降至0.033 Hz,而在小于0.033 Hz的超低频带,应用主动控制方式可以实现低能耗的高精度隔振,因此二者结合可以实现简单、可靠、低耗、高效的微振动宽频隔振。
宽频隔振;气动肌肉;负刚度机构;主动控制
随着科学技术的迅猛发展,现代机械加工工业,尤其是光学工业、感光化学、航空航天、半导体工业,已步入精密、超精密时代,外部环境的微振动干扰直接影响精密操作的质量,这些微振动干扰主要来自大地脉动型地面振动,其频率主要在0~1 Hz范围内;房屋骨架、墙壁和地板产生的与剪切和弯曲有关的15~25 Hz振动;办公室工作人员走动引起的频率在1~3 Hz的振动;通风管道、变压器和发动机所引发的6~65 Hz振动;建筑物自身的振动,一般在10~100 Hz之间,因此在隔振系统设计时所考虑的微振动频率范围应为0~100 Hz,即隔振系统不仅要具有宽频隔振能力,而且效果要显著[1-3]。
目前的精密隔振方式主动分为两大类,即被动控制和主动控制,被动控制装置不需要能源、结构简单、可靠性高,国内外应用最多的有空气弹簧、橡胶隔振器、金属弹簧等,而这类装置都属于线性隔振系统,从现实意义上来说,其固有频率很难降到1 Hz以下,因此近年来国内外诸多学者[4-5]在线性隔振器的基础上引入了负刚度机构,在提高低频隔振能力的同时也保持了隔振系统的静态承载能力,然而系统却存在主共振等非线性现象,在跳跃区间内存在共振峰。主动控制是在振动控制的过程中,根据传感器检测到的系统振动,应用一定的控制策略驱动致动器对系统施加力或力矩,以抑制系统的振动,其灵活性强、隔振精度高,低频隔振效果尤其明显,因此越来越多的学者开始将主动控制方式应用到精密隔振当中,如Nakamura等[6]采用8个超磁致伸缩致动器和4个空气弹簧对一质量为2 000 kg的六自由度微振动隔振平台进行了主动控制实验研究,采用6个加速度计获取平台的振动信号用于控制,控制方法是模态匹配法,实验结果表明,在3~20 Hz频率范围内,振动加速度衰减到地面振动的l/3~1/10。Geng等[7]采用6个磁致伸缩致动器对Stewart平台进行了主动隔振控制实验,反馈信号为加速度和力,采用鲁棒自适应滤波控制算法,实验结果表明,对于56.2Hz的干扰,可获得30 dB的减振效果。哈工大精密工程研究所[8]以自行研制的超精密车床为对象,采用主、被动控制相结合的方法研究了垂向隔振控制,被动支撑元件为4个空气弹簧,采用电磁致动器,利用压电加速度传感器拾取振动信号,实验结果表明,振动加速度由原来的1.5×10-4g降到6.04×10-5g,具有较好的低频隔振效果。张春良等[9]基于啄木鸟头部生物构造及其仿生隔振机理,采用混合隔振技术建立了微制造平台隔振系统,该系统以空气弹簧和橡胶层作为被动隔振元件、超磁致伸缩致动器作为主动隔振元件,利用模糊广义预测控制等算法进行了隔振控制研究,结果表明该隔振系统可在非常宽的频率范围内减振80%左右。然而,这些主动控制方式所附加的驱动器及控制软硬件增加了系统的复杂性和能耗,降低了系统的可靠性。
本文引入结构简单、成本低的气动肌肉和负刚度机构构建了一种主、被动控制相结合的隔振系统,着重对其被动控制的性能以及主动控制的算法和性能进行分析研究,为实现简单、可靠、低耗、高效的微振动宽频隔振奠定基础。
1 隔振系统
图1为隔振系统示意图,两根气动肌肉和两个弹簧对称布置,气动肌肉采用的是德国FESTO公司的DMSP-20-190N型气动肌肉,每根气动肌肉只有一个充放气孔,气体流量和气流方向采用带位移反馈的滑阀式电-气方向比例阀控制,气动肌肉采用斜拉方式,以提高系统水平方向和垂直隔振方向的稳定性;两根弹簧采用预压缩的方式,以给系统提供负刚度。系统的基本结构参数如图1所示。
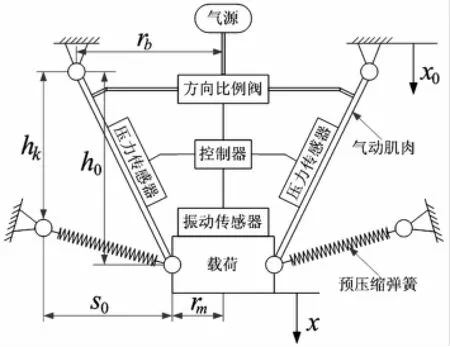
图1 隔振系统示意图Fig.1 Schematic diagram of the vibration isolation system
2 动力学建模
2.1 气动肌肉收缩力模型及容腔内气体动态方程
气动肌肉是由内部的橡胶管或可膨胀气囊及外部套管构成。当向气囊充气时,内层橡胶层膨胀,会有沿着径向变粗和轴向收缩的趋势[10-11],如图2所示,因此气动肌肉此时输出的力是轴向收缩力,即只能承受轴向拉力载荷,其基本结构参数如图3所示。

图2 气动肌肉结构简图Fig.2 Structure diagram of the PAM

图3 气动肌肉基本结构参数示意图Fig.3 Basic structure parameter diagram of the PAM
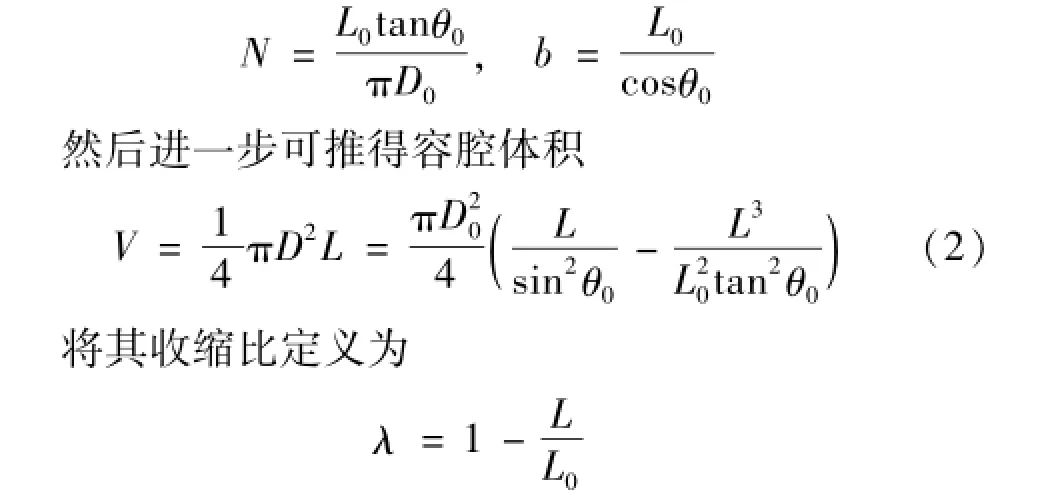
气动肌肉在收放的过程中,单根编织线的长度b是不变的,其缠绕圈数N也是不变的,由图3所示的几何关系可得

由于单根编织线的长度b及其缠绕圈数N是不变的,因此可根据式(1)由气动肌肉自由状态的初始长度L0、初始直径D0、初始纤维编织角θ0得到
关于气动肌肉收缩力模型的研究成果很多,但这些模型对于具体的气动肌肉而言会存在一定的偏差,为此本文根据具体的DMSP-20-190N型气动肌肉在不同容腔内压下通过实验获得的收缩比与收缩力的关系数据(如图4),运用最小二乘曲面拟合方法得到了如下的收缩力模型

其中:p为气动肌肉容腔内压强。
根据收缩力模型(3)可以得到在不同容腔内压下的收缩比与收缩力的关系曲线,如图5,通过对比图4、5可以发现两组数据的吻合精度很高,表明所得到的收缩力模型(3)对具体的DMSP-20-190N型气动肌肉而言是可靠的。

图4 气动肌肉实验数据曲线Fig.4 Experiment data curves of the PAM
在图1所示的隔振系统中,气动肌肉有两种工作状态,一种是被动控制方式下的无充放气状态,第二种是主动控制方式下的连续充放气状态。在被动控制方
式下,气动肌肉不需要充放气,此时容腔内气体的状态可用理想气体状态方程来描述

其中:n为气体的量,R为气体常数,T为绝对温度。假设容腔内温度不变,则有

在主动控制方式下,气动肌肉需要连续充放气,此时容腔内气体的动态方程可根据热力学第一定律和理想气体状态方程来获得


图5 基于气动肌肉收缩力模型的仿真数据曲线Fig.5 Simulation data curves based on the PAMmechanicalmodel
其中:qm为充放气的质量流量,kr为气体的比热比。
系统采用带位移反馈的滑阀式电-气方向比例阀控制气动肌肉的充放气流量,由于这种阀的线性度优越、滞回小、动态性能高,因此为了便于研究问题,可将通过比例阀的气体流量及气流方向与控制输入电压之间的关系简化为如下的线性模型

其中:km为比例阀的流量控制增益,Ue为输入电压。
2.2 系统振动方程
由图1根据拉格朗日动力学方程可得系统的动力学方程

3 被动控制隔振分析
3.1 刚度及稳定性分析
由式(3)、(4)、(7)可得系统的静刚度

根据式(8)通过数值计算得到系统的静刚度随位形h0变化的曲线(如图6),可见,当h0=17 mm时刚度接近零,而远离该位形时刚度值陡然升高,因此选该位置为系统的工作平衡位置。
同样根据式(8)通过数值计算也可得到系统的静刚度在所选定的工作平衡位置(h0=17 mm)附近随振动位移x变化的曲线(如图7),由图6、7可见,当系统处于平衡位置时刚度值接近于零,而远离平衡位置时刚度值陡然升高,且始终保持ke>0,因此选该位置为工作平衡位置既实现了系统的准零刚度特性,同时也保证了系统的稳定性[12]。

图6 静刚度与位形的关系曲线Fig.6 Curve of the static stiffness and the configuration

图7 静刚度与振动位移的关系曲线Fig.7 Curve of the static stiffness and the vibration displacement

图8 弹性恢复力与振动位移的关系曲线Fig.8 Curve of the elastic restoring force and the vibration displacement
3.2 振动传递特性分析
式(7)较为复杂,考虑到图8所示的弹性恢复力-位移曲线近似于三次曲线,将式(7)中的恢复力F进行简化,位移非线性项在点x=0,x0=0,附近应用三阶泰勒展开,速度非线性项应用一阶泰勒展开,则恢复力化为

由于K2比K1、K3小两个以上数量级,因此可将其忽略,则式(9)可近似为
F≈C1(x·-x·0)+K1(x-x0)+K3(x-x0)3(10)
将式(10)代入到式(7)中的第一个方程中得到动态方程


在简谐激励x0=B cos2πγt下,应用近似解析法-谐波平衡法对式(12)进行求解,设其解为

将式(13)代入到(12)中,令一次谐波项的系数相等,并消去相位变量φ得系统的振幅A与频率γ之间的关系
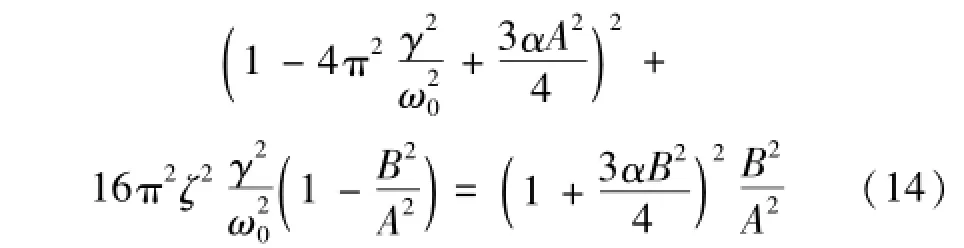

图9 振动位移传递率曲线Fig.9 Vibration transmissibility curve
根据式(14)可画出振动位移传率曲线,如图9,可见该系统存在主共振及跳跃等非线性现象,在向上跳跃与向下跳跃频率的区间内基本没有隔振作用,只有激励频率大于向下跳跃频率时系统才有隔振效果,另外,增大激励幅值时,跳跃区间会变宽,此时隔振效果也将随之变差,隔振频带收缩。
3.3 振动响应分析
根据动力学方程(3)、(4)、(7),运用数值方法进行被动控制隔振仿真,图10是给定不同激励时的仿真结果,可见激励频率小于0.032 Hz时,系统没有隔振效果,但是当激励频率达到0.033 Hz时,却有了明显的隔振效果,之所以有这样大的反差,很可能是因为系统的向下跳跃频率在0.032~0.033 Hz之间,而不是如图9所示在0.05 Hz左右,因为采用一次谐波平衡法的求解精度要低于数值方法。当超过0.033 Hz时,随着激励频率的增大隔振效果变得更好,60 Hz时隔振率达到了约67 dB。另外,随着激励频率的提高,位移响应的振动中心产生了偏离现象,如图10(d)所示,大约偏移-2×10-3mm,这是由于系统振动平衡位置两侧的刚度具有不对称性,如图7所示,载荷向正向偏移时其恢复刚度高于向负向偏移时的恢复刚度,这种刚度的不对称性导致了振动中心发生偏离现象。

图10 不同激励下系统的振动响应Fig.10 Vibration responses under some harmonic excitations
4 主动控制隔振分析
4.1 反演自适应滑模控制算法
反演控制设计方法通过逐级构造Lyapunov函数得到中间的虚拟控制量,最终递推出含真实输入的系统控制律,因为该方法严格按照Lyapunov函数递推控制律,因此可以保证系统的闭环稳定性[13],而滑模控制方法是一种新型鲁棒控制策略,其滑动模态可以进行设计,与对象参数摄动和外界扰动无关,因此这种控制方法具有响应快、对参数变化及扰动不灵敏的优点,与自适应技术相结合可以进一步解决其不确定性及外界扰动上下界的设计问题[14]。
这里假设振动位移x和速度x·可测,而基座振动激励x0不可测量,因此将激励x0引起的不确定性视为未知扰动,另外,气动肌肉的等效阻尼系数ce也不易测得,因此也作为不确定参数,根据式(2)、(3)、(5)、(6)、(7),令

则可得系统的控制模型

其中:ρ、Ω均为有界正常数,等效阻尼系数ce亦为有界正常数。



定理 对于系统(16),控制律采用式(18)、(21)、(27),自适应律采用(23)、(24)、(29),可以使得系统达到全局渐近稳定,最终使得振动位移x、控制输入Ue渐近地趋于零。
证明 选取Lyapunov函数
V=V1+V3+V5对其求导,并将控制律(18)、(21)、(27)及自适应律(23)、(24)、(29)代入,然后由式(19)、(25)、(30)可得

即振动位移x渐近地趋于零。
为了消除符号函数sgn(e)引起的抖振,在实际控制中将控制律(21)、(27)中的函数sgn(e)用如下的继电特性函数取代


另外,气动肌肉容腔内的压强p也应该是有界的,所以结合式(3)、(16)、(32)、(33)、(38)、(39)可得

即系统的控制输入Ue渐近地趋于零。证毕。
4.2 主动控制下的振动响应分析
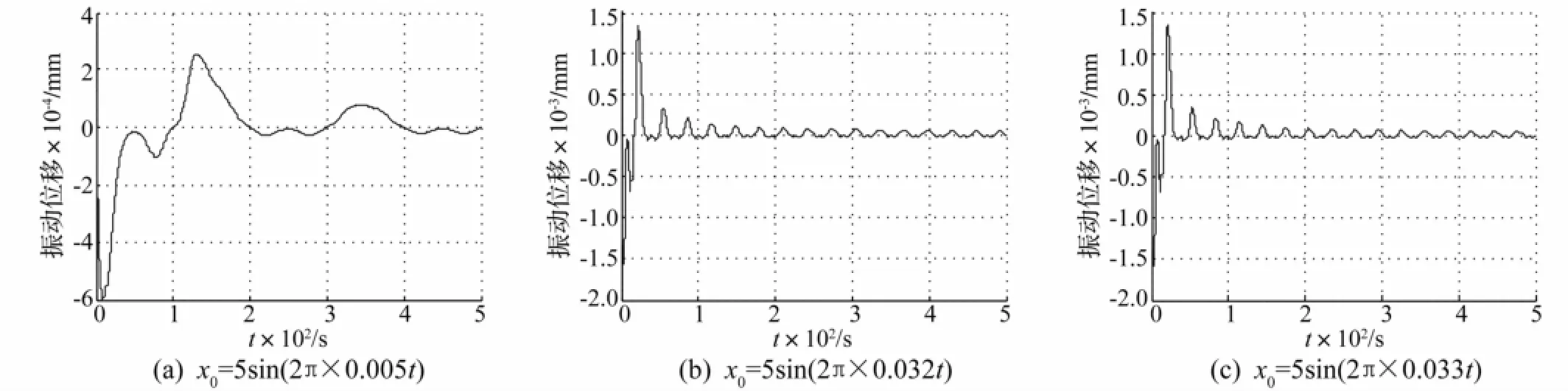
图11 不同激励下系统的振动响应Fig.11 Vibration responses under some harmonic excitations
给定控制及气动参数如下:

根据动力学方程(7)、控制模型(16)以及控制律(18)、(34)、(35)和自适应律(23)、(24)、(29),针对被动控制隔振薄弱的0.033 Hz以下的超低频段,运用数值方法进行主动控制数值仿真,图11是给定不同激励时系统的振动响应,图12是相应的控制输入,由图可见,在0.033 Hz以下的超低频段系统能达到70 dB以上的隔振率,所消耗的控制能量也较少,因此主动控制能弥补被动控制在超低频段隔振能力的不足。

图12 不同激励下系统的控制输入Fig.12 Control inputs under some harmonic excitations
5 结 论
(1)隔振系统的刚度在工作平衡位置可接近零,远离平衡位置时的刚度值陡然升高,系统有良好的承载能力和稳定性。
(2)被动控制方式下,系统存在主共振和跳跃等非线性现象,但低频的隔振频带有了一定的拓展,可达到0.033 Hz,隔振效果也较好。另外,该系统的振动传递率不仅与激励频率有关,而且与激励的幅值有关,这也是与线性系统的不同之处。
(3)由于系统刚度的不对称性,被动控制下位移响应的振动中心相对于工作平衡位置有一定的偏移,偏移方向指向刚度低的一侧。
(4)在小于0.033 Hz的超低频范围内,采用基于反演自适应滑模控制算法的主动控制方式,隔振效果良好,消耗的控制能量也较少。
(5)若在大于0.033 Hz的频段采用被动控制方式,而在小于0.033 Hz的超低频范围内采用主动控制方式,则该系统可以实现可靠、低耗、高效的微振动(幅值小于5 mm)宽频隔振。
[1]Bishop D J,Giles C R,Austin G P.The lucent LambdaRouter:MEMS technology of the future here today[J].IEEE Communications Magazine,2002,40(3):75-79.
[2]李艳秋.光刻机的演变及今后发展趋势[J].微细加工技术,2003(2):1-5.
LIYan-qiu.Lithography tool evolution and the trend of its development[J].Microfabrication Technology,2003(2):1-5.
[3]张春良,梅德庆,陈子辰.振动主动控制及应用[M].哈尔滨:哈尔滨工业大学出版社,2010.
[4]张建卓,董申,李旦.基于正负刚度并联的新型隔振系统研究[J].纳米技术与精密工程,2004,2(4):314-318.
ZHANG Jian-zhuo,DONG Shen,LIDan.Study on new type vibration isolation system based on combined positive and negative stiffness[J].Nanotechnology and Precision Engineering,2004,2(4):314-318.
[5]Carrella A,Brennan MJ,Waters T P.Static analysis of a passive vibration isolator with quasi-zero-stiffness characteristic[J].Journal of Sound and Vibration,2007,301(3):678-689.
[6]Nakamura Y,Nakayama M,Masuda K,et al.Development of active 6-DOF microvibration control system using giant magnetostrictive actuator[C].Proceedings of the SPIE Conference on Smart Systems for Bridges,Structures and Highways,Newport Beach,California,March 1999:229-240.
[7]Geng Z J,Leonard SH.Six degree-of-freedom active vibration control using the Stewart platform[J].IEEE Transaction on Control System Technology,1994,2(1):45-53.
[8]盖玉先,董申,李旦,等.超精密机床的振动混合控制[J].中国机械工程,2000,11(3):289-291.
GAIYu-xian,DONG Shen,LIDan,et al.Hybrid-type vibration isolation system for ultra-precision machine tool[J].China Mechanical Engineering,2000,11(3):289-291.
[9]张春良,梅德庆,陈子辰.微制造隔振平台振动的模糊广义预测控制[J].机械工程学报,2007,43(12):194-201.
ZHANG Chun-liang,MEI De-qing,CHEN Zi-chen.Fuzzy generalized predictive control of microvibration isolation system for a micro-manufacturing platform[J].Chinese Journal of Mechanical Engineering,2007,43(12):194-201.
[10]韩桉.基于气动人工肌肉隔振系统的研究[D].武汉:华中科技大学,2009.
[11]王雄耀.介绍一种气动新产品——仿生气动肌肉腱[J].液压气动与密封,2002(1):31-35.
WANG Xiong-yao.Introduction to a new product-muscle actuator sinale(MAS)[J].Hydraulics Pnenmatics&Seals,2002,(1):31-35.
[12]彭解华,陈树年.正、负刚度并联结构的稳定性及应用研究[J].振动、测试与诊断,1995,15(2):14-17.
PENG Jie-hua,CHEN Shu-nian.The stability and application of a structure with positive stiffness element and negative stiffness element[J].Journal of Vibration,Measurement&Diagnosis,1995,15(2):14-17.
[13]陈虹,胡云峰,郭宏志,等.基于backstepping方法的电子节气门控制[J].控制理论与应用,2011,28(4):491-496.
CHEN Hong,HU Yun-feng,GUO Hong-zhi,et al.Control of electronic throttle based on backstepping approach[J].Control Theory&Applications,2011,28(4):491-496.
[14]刘金琨,孙富春.滑模变结构控制理论及其算法研究与进展[J].控制理论与应用,2007,24(3):407-418.
LIU Jin-kun,SUN Fu-chun.Research and development on theory and algorithms of sliding mode control[J].Control Theory&Applications,2007,24(3):407-418.
Active and passive broad-frequency vibration isolation based on PAMand negative stiffness element
LIU Yan-bin,HAN Xiu-ying,MA Jia-jia,YIN Chen-xu
(Henan University of Science and Technology,Luoyang 471003,China)
In order to realize simple,reliable,low energy consumption and high efficient broad-frequencymicrovibration isolation,a new vibration isolation system was set up by using pneumatic artificialmuscle(PAM)and negative stiffness element,and active and passive control for the vibration isolation system were studied.Firstly,the dynamic model of the vibration isolation system was built,its quasi-zero stiffness characteristics were analyzed,its vibration transmissibility,response and nonlinear phenomena were analyzed by using the approximate analytical method and the numericalmethod.And then,the low-frequency active control strategy for the vibration isolation system was developed by using the inversion control design method,the adaptive control technique and the sliding mode control technique.The vibration isolation performance under the active controlwas analyzed by using the numericalmethod.The results showed that the vibration isolation system widens the low-frequency vibration isolation frequency band of passive control,the vibration isolation frequency can be lowered to0.033Hz for the harmonic excitation whose amplitude is less than 5mm;the low energy consumption and high precision isolation can be realized by using the active controlmethod within an ultralow frequency range of less than 0.033 Hz,for this reason,simple,reliable,low energy consumption and high efficientbroadfrequency isolation can be realized by combining the passive control with the active control.
broad-frequency vibration isolation;pneumatic artificialmuscle(PAM);negative stiffness element;active control
TH113.1
A
10.13465/j.cnki.jvs.2014.24.030
河南省教育厅科学技术研究重点项目(13A460237)
2014-05-16 修改稿收到日期:2014-07-23
刘延斌男,博士,教授,硕士生导师,1971年11月生